
目标检测:Anchor-Free时代
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

作者:陀飞轮
自从去年8月CornerNet开始,Anchor-Free的目标检测模型层出不穷,最近达到了井喷的状态,宣告着目标检测迈入了Anchor-Free时代。
其实Anchor-Free并不是一个新概念了,大火的YOLO算是目标检测领域最早的Anchor-Free模型,而最近的Anchor-Free模型如FASF、FCOS、FoveaBox都能看到DenseBox的影子。
下面主要讲一下有代表性的Anchor-Free模型(包括DenseBox、YOLO、CornerNet、ExtremeNet、FSAF、FCOS、FoveaBox),分成3个部分来介绍(早期探索、基于关键点、密集预测),具体细节就不展开了~
早期探索
最早知道这篇文章,是在去年刚接触目标检测的时候,看了一篇地平线对DenseBox作者的采访,当时因为刚接触感触不深,但是从当前的时间节点回头看,DenseBox的想法是多么的超前啊。采访中说道,当年DenseBox其实早在2015年初就已经开发出来了,这比同期的Faster-RCNN系列提前数月,但是论文直到9月才在arxiv上发布。如果DenseBox能在2015年初就发表,那么最近几年目标检测的发展会不会是另外一番景象呢~~
https://zhuanlan.zhihu.com/p/24350950
两点贡献:
1.证明单个FCN可以检测出遮挡严重、不同尺度的目标。
2.通过多任务引入landmark localization,能进一步提升性能。
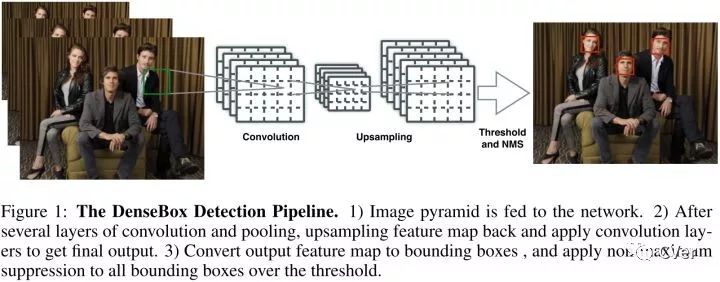
如图1所示,单个FCN同时产生多个预测bbox和置信分数的输出。测试时,整个系统将图片作为输入,输出5个通道的feature map。每个pixel的输出feature map得到5维的向量,包括一个置信分数和bbox边界到该pixel距离的4个值。最后输出feature map的每个pixel转化为带分数的bbox,然后经过NMS后处理。
Ground Truth Generation
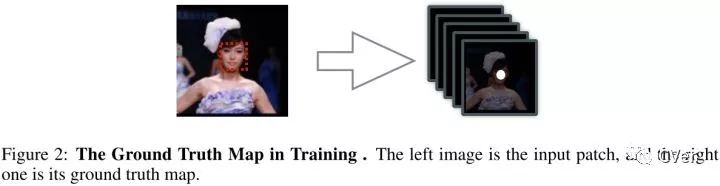
第一个通道ground truth map的正标签区域由半径为r的圆填充,圆的中心点位于bbox的中点。而剩下的4个通道由bbox的2个角点决定。
Refine with Landmark Localization
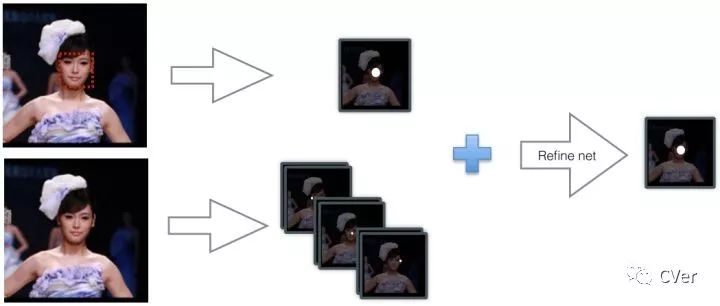
在FCN结构中添加少量层能够实现landmark localization,然后通过融合landmark heatmaps和score map可以进一步提升检测结果。
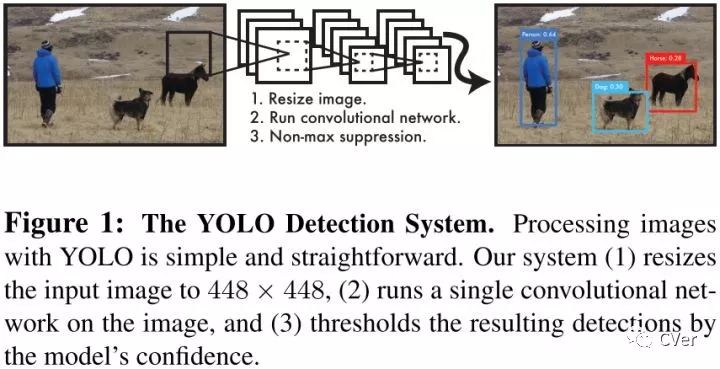
2.YOLOYOLO将目标检测作为一个空间分离的边界框和相关的类概率的回归问题。可以直接从整张图片预测出边界框和分类分数。
三个优点:
1.速度快
2.通过整幅图进行推理得到预测结果
3.能学到目标的一般特征
Unified Detection
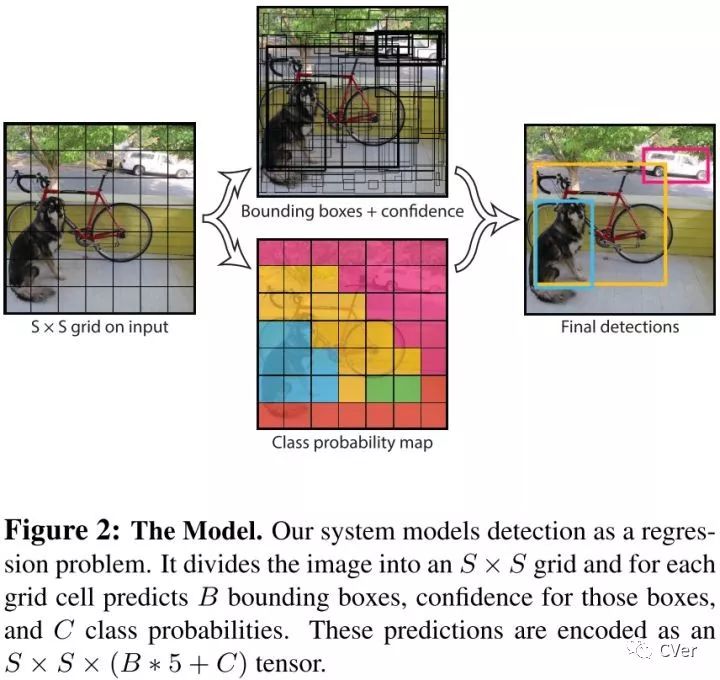
YOLO将输入图片分成SXS个网格,如果某个目标的中心点落到其中一个格点,那么该格点就负责该目标的检测。每个格点预测出B个bbox和每个bbox的置信分数。
定义置信度为:

每个bbox由5个预测值组成:x,y,w,h 和 置信度。每个格点也预测C个类概率

测试的时候,将类概率和置信分数相乘,得到类置信分数

举个例子,在Pascal VOC数据集上评估YOLO,使用S=7,B=2,VOC有20类,所以C=20,那么最终的预测结果是7x7x30的向量。
DenseBox和YOLO的区别:
1.DenseBox应用于人脸检测,相当于只有两类,而YOLO是通用检测,通常大于两类。
2.DenseBox是密集预测,对每个pixel进行预测,而YOLO先将图片进行网格化,对每个grid cell进行预测。
3.DenseBox的gt通过bbox中心圆形区域确定的,而YOLO的gt由bbox中心点落入的grid cell确定的。
基于关键点
两点贡献:
1.通过检测bbox的一对角点来检测出目标。
2.提出corner pooling,来更好的定位bbox的角点。
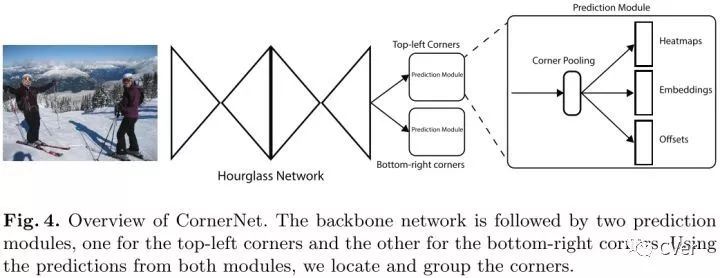
Detecting Corners
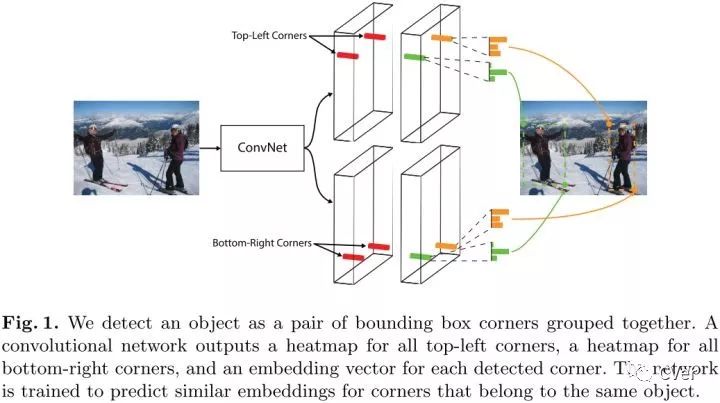
首先预测出两组heatmaps,一组为top-left角点,另一组为bottom-right角点。每组heatmaps有C个通道,表示C个类别,尺寸为HxW。每个通道是一个binary mask,表示一个类的角点位置。
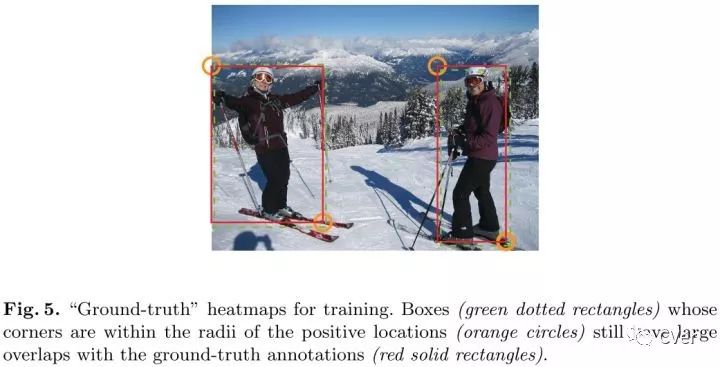
对于每个角点来说,只有一个gt正例位置,其他都为负例位置。训练时,以正例位置为圆心,设置半径为r的范围内,减少负例位置的惩罚(采用二维高斯的形式),如上图所示。
Grouping Corners
受到多人姿态估计论文的启发,基于角点embedding之间的距离来对角点进行分组。
Corner Pooling
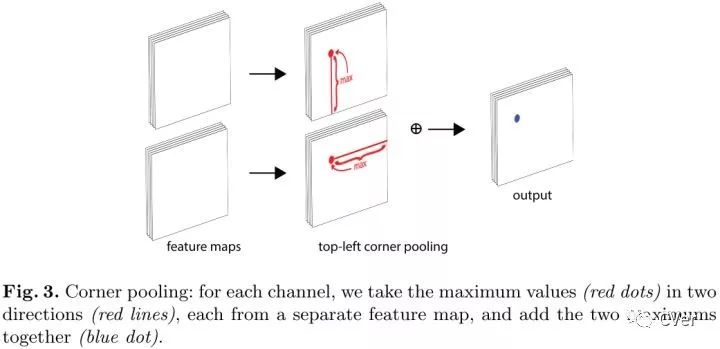
在每个pixel位置,最大池化第一个feature map右方的所有特征向量,最大池第二个feature map下方的所有特征向量,然后将两个池化结果相加。
4.ExtremeNet两个贡献:
1.将关键点定义为极值点。
2.根据几何结构对关键点进行分组。
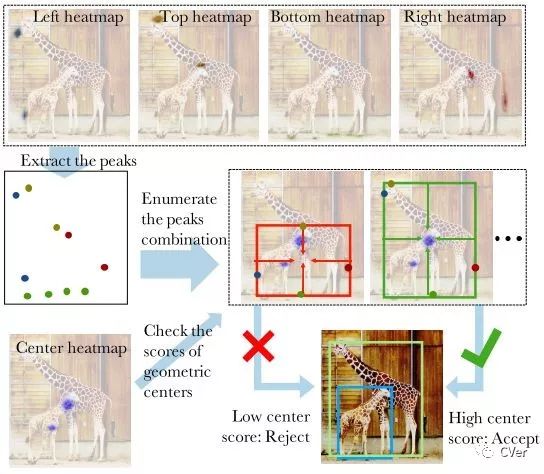
作者使用了最佳的关键点估计框架,通过对每个目标类预测4个多峰值的heatmaps来寻找极值点。另外,作者使用每个类center heatmap来预测目标中心。仅通过基于几何的方法来对极值点分组,如果4个极值点的几何中点在center map上对应的分数高于阈值,则这4个极值点分为一组。
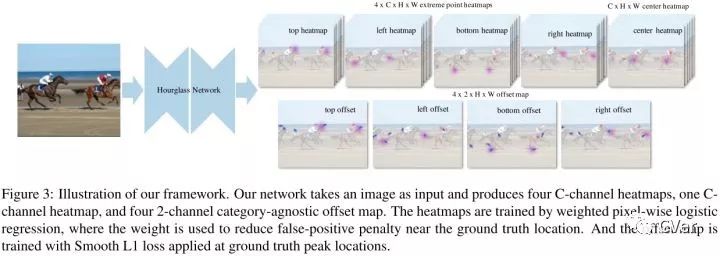
offset的预测是类别无关的,而极值点的预测是类别相关的。center map没有offset预测。网络的输出是5xC heatmaps和4x2offset maps,C是类别数。
Center Grouping
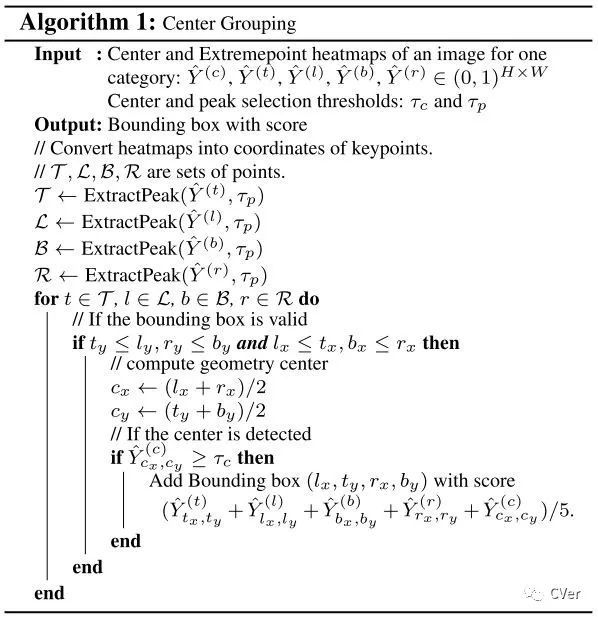
分组算法的输入是每个类的5个heatmaps,一个center heatmap和4个extreme heatmaps,通过检测所有的峰值来提取出5个heatmaps的关键点。给出4个极值点,计算几何中心,如果几何中心在center map上对应高响应,那么这4个极值点为有效检测。作者使用暴力枚举的方式来得到所有有效的4个关键点。
CornerNet和ExtremeNet的区别:
1.CornerNet通过预测角点来检测目标的,而ExtremeNet通过预测极值点和中心点来检测目标的。
2.CornerNet通过角点embedding之间的距离来判断是否为同一组关键点,而ExtremeNet通过暴力枚举极值点、经过中心点判断4个极值点是否为一组。
密集预测
Motivation
让每个实例选择最好的特征层来优化网络,因此不需要anchor来限制特征的选择。
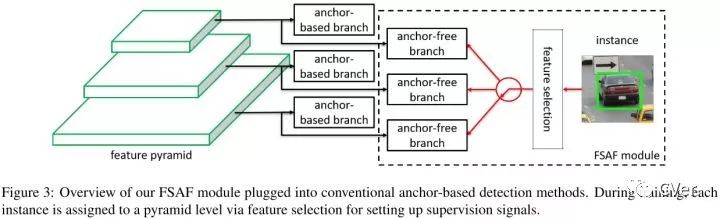
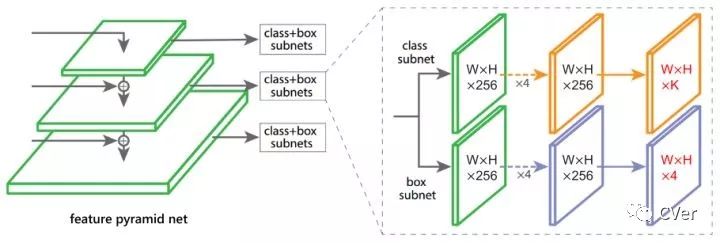
一个anchor-free的分支在每个特征金字塔层构建,独立于anchor-based的分支。和anchor-based分支相似,anchor-free分支由分类子网络和回归子网络。一个实例能够被安排到任意层的anchor-free分支。训练期间,基于实例的信息而不是实例box的尺寸来动态地为每个实例选择最合适的特征层。选择的特征层学会检测安排的实例。推理阶段,FSAF模块和anchor-based分支独立或者联合运行。
Feature Selective Anchor-Free Module
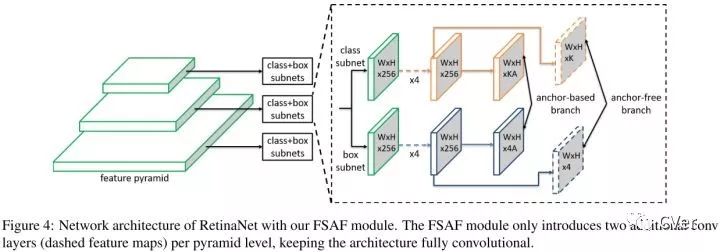
在RetinaNet的基础上,FSAF模块引入了2个额外的卷积层,这两个卷积层各自负责anchor-free分支的分类和回归预测。具体的,在分类子网络中,feature map后面跟着K个3x3的卷积层和sigmoid,在回归子网络中,feature map后面跟着4个3x3的卷积层和ReLU。
Ground-truth
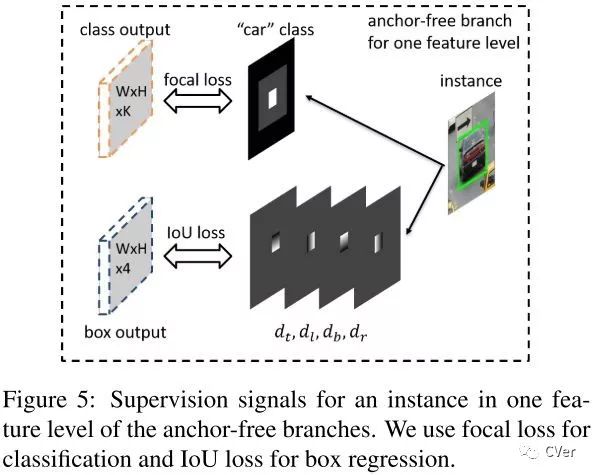
白色为有效区域,灰色为忽略区域,黑色为负样本区域。
Online Feature Selection
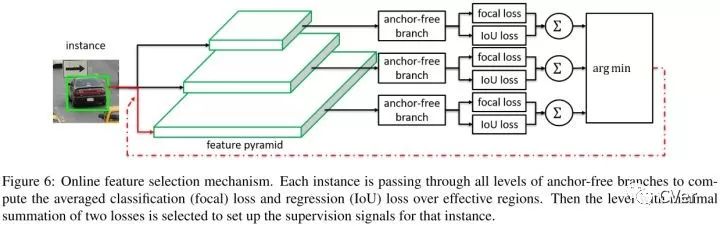
实例输入到特征金字塔的所有层,然后求得所有anchor-free分支focal loss和IoU loss的和,选择loss和最小的特征层来学习实例。训练时,特征根据安排的实例进行更新。推理时,不需要进行特征更新,因为最合适的特征金字塔层自然地输出高置信分数。
6.FCOS四个优点:
1.将检测和其他使用FCN的任务统一起来,容易重用这些任务的思想。
2.proposal free和anchor free,减少了超参的设计。
3.不使用trick,达到了单阶段检测的最佳性能。
4.经过小的修改,可以立即拓展到其他视觉任务上。
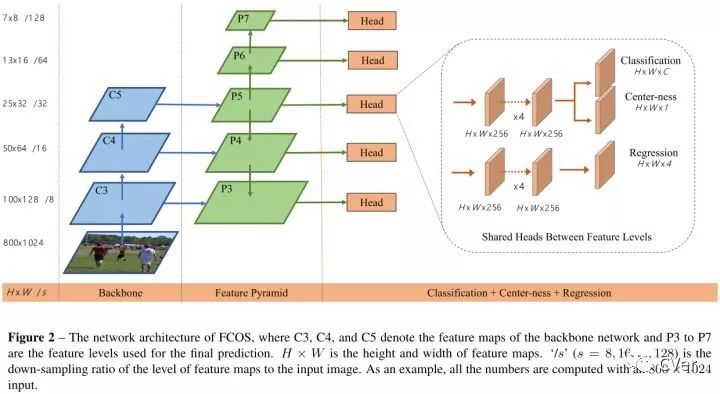
和语义分割相同,检测器直接将位置作为训练样本而不是anchor。具体的,如果某个位置落入了任何gt中,那么该位置就被认为是正样本,并且类别为该gt的类别。基于anchor的检测器,根据不同尺寸安排anchor到不同的特征层,而FCOS直接限制边界框回归的范围(即每个feature map负责一定尺度的回归框)。
Center-ness
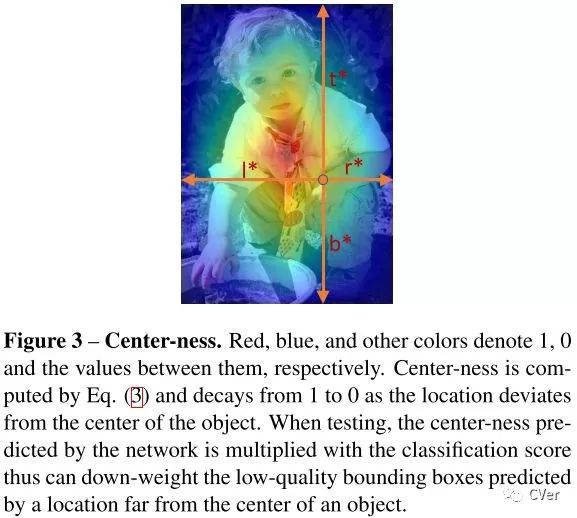
为了剔除远离目标中心的低质量预测bbox,作者提出了添加center-ness分支,和分类分支并行。

开根号使center-ness衰退缓慢。center-ness范围为0-1之间,通过BCE训练。测试时,最终分数由center-ness预测结果和分类分数乘积得到。
7.FoveaBoxMotivation
人类眼睛的中央凹:视野(物体)的中心具有最高的视觉敏锐度。FoveaBox联合预测对象中心区域可能存在的位置以及每个有效位置的边界框。由于特征金字塔的特征表示,不同尺度的目标可以从多个特征层中检测到。
FoveaBox添加了2个子网络,一个子网络预测分类,另一个子网络预测bbox。
Object Fovea
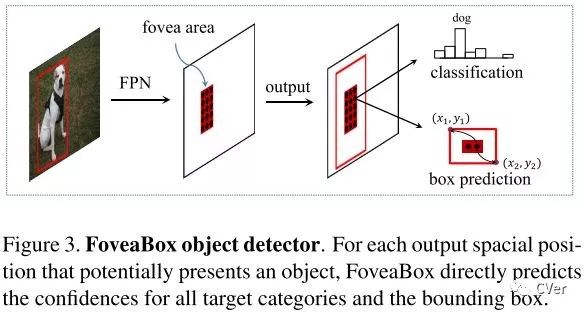
目标的中央凹如上图所示。目标中央凹只编码目标对象存在的概率。为了确定位置,模型要预测每个潜在实例的边界框。
FSAF、FCOS、FoveaBox的异同点:1.都利用FPN来进行多尺度目标检测。
2.都将分类和回归解耦成2个子网络来处理。
3.都是通过密集预测进行分类和回归的。
4.FSAF和FCOS的回归预测的是到4个边界的距离,而FoveaBox的回归预测的是一个坐标转换。
5.FSAF通过在线特征选择的方式,选择更加合适的特征来提升性能,FCOS通过center-ness分支剔除掉低质量bbox来提升性能,FoveaBox通过只预测目标中心区域来提升性能。
(DenseBox、YOLO)和(FSAF、FCOS、FoveaBox)的异同点:1.都是通过密集预测进行分类和回归的。
2.(FSAF、FCOS、FoveaBox)利用FPN进行多尺度目标检测,而(DenseBox、YOLO)只有单尺度目标检测。
3.(FSAF、FCOS、FoveaBox)将分类和回归解耦成2个子网络来得到,而(DenseBox、YOLO)分类和定位统一得到。
总结:1.各种方法的关键在于gt如何定义
2.主要是基于关键点检测的方法和密集预测的方法来做Anchor-Free
3.本质上是将基于anchor转换成了基于point/region
Reference
1.DenseBox: Unifying Landmark Localization with End to End Object Detection
2.You Only Look Once: Unified, Real-Time Object Detection
3.CornerNet: Detecting Objects as Paired Keypoints
4.Bottom-up Object Detection by Grouping Extreme and Center Points
5.Feature Selective Anchor-Free Module for Single-Shot Object Detection
6.FCOS: Fully Convolutional One-Stage Object Detection
7.FoveaBox: Beyond Anchor-based Object Detector
下载1:OpenCV-Contrib扩展模块中文版教程在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~