
攀爬、跳跃、过窄缝,开源强化学习策略让机器狗能跑酷了

来源:机器之心 本文约1250字,建议阅读5分钟
主打一个迅速。
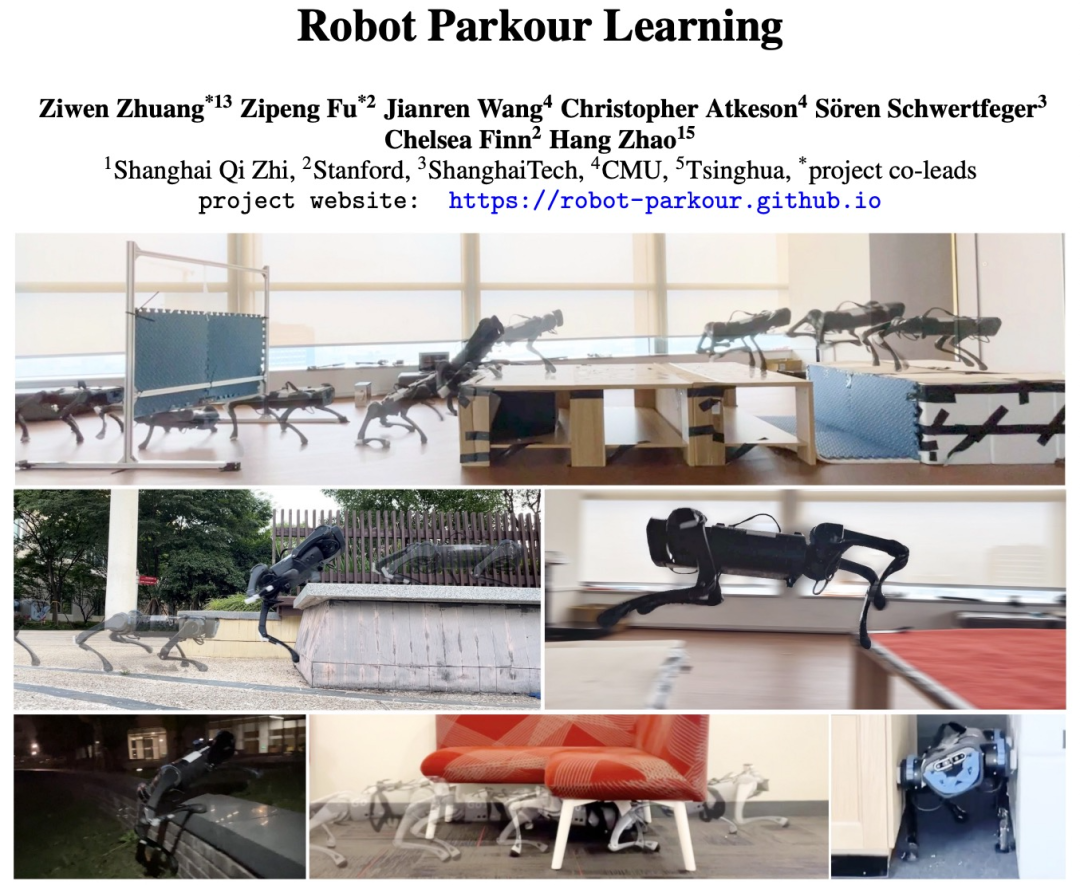
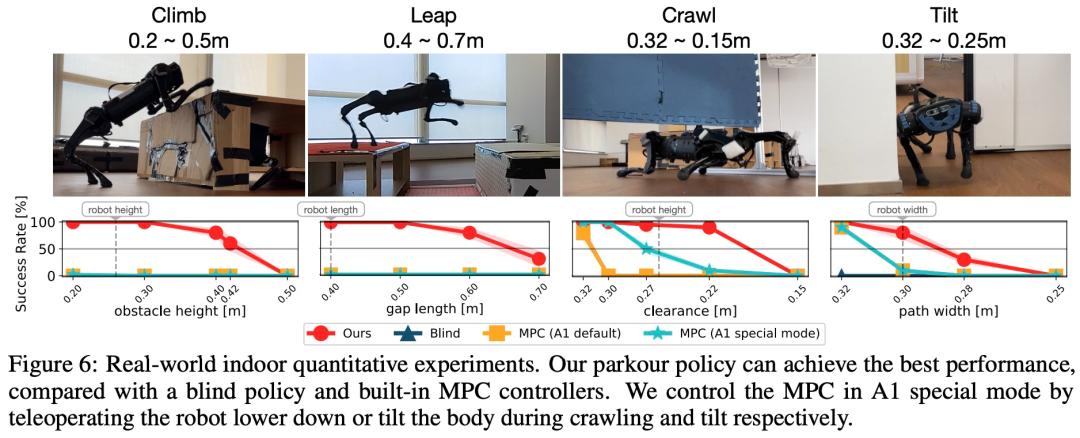
跑酷是一项极限运动,对机器人特别是四足机器狗来说,更是一项巨大的挑战,需要在复杂的环境中快速克服各种障碍。一些研究尝试使用参考动物数据或复杂的奖励,但这些方法生成的「跑酷」技能要么多样但盲目,要么基于视觉但特定于场景。然而,自主跑酷需要机器人学习基于视觉且多样化的通用技能,以感知各种场景并迅速做出反应。
最近,一个机器狗跑酷的视频火了,视频中的机器狗在多种场景中迅速克服了各种障碍。例如,从铁板下方的缝隙穿过,爬上木箱,再跳到另一个木箱上,一连串动作行云流水:



编辑:文婧
评论