
使用长波长红外的低复杂度视觉无人机航迹导航
点击下方卡片,关注“新机器视觉”公众号
重磅干货,第一时间送达
在没有全球导航卫星系统 (GNSS) 的情况下,无人驾驶飞行器 (UAV) 的运行仍然是研究人员和商业发展感兴趣的领域。对于图像强度不同的许多基于特征的导航技术来说,合适的增益设置是一个挑战。图1显示了从 LWIR 传感器的辐射原始数据获得的图像帧,其中应用了增益和偏移以最大化各个图像的对比度。包括每个图像的温度范围,以展示观察到的热发射率随一天中的时间和所观察的地形类型而变化。
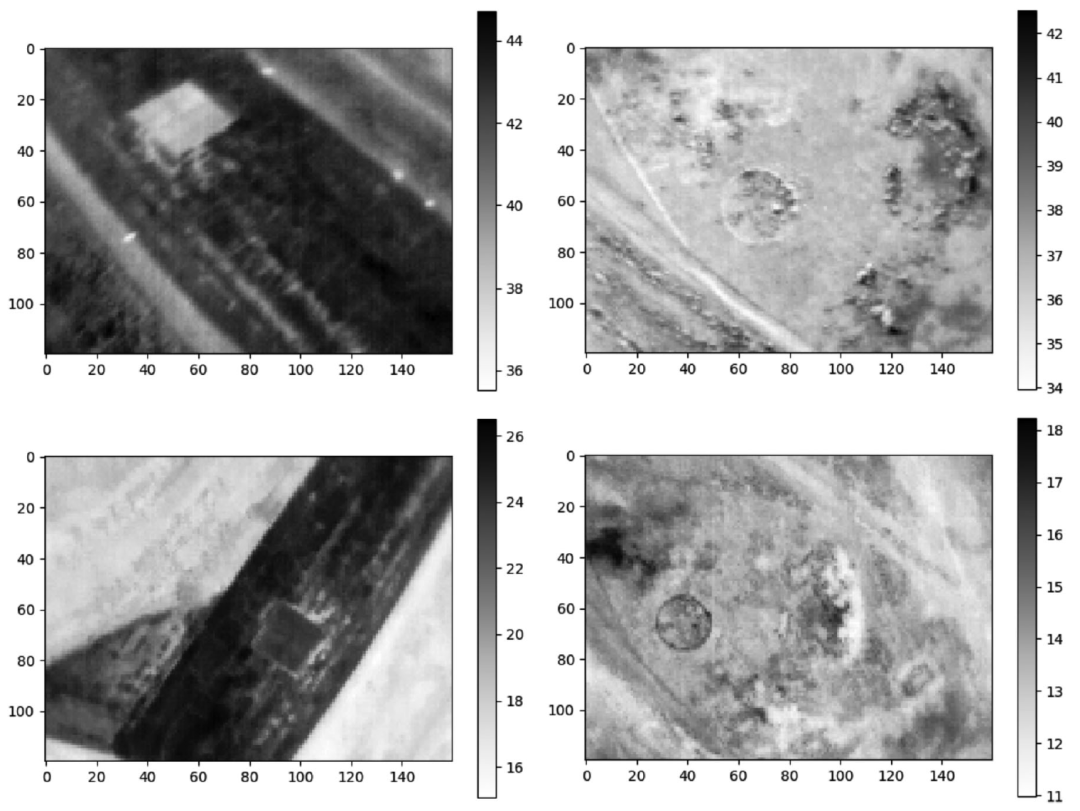
图1 长波红外 (LWIR) 传感器处理后的热图像。跑道(左上)和地形(右上)的白天LWIR图像。跑道(左下)和地形(右下)的夜间图像。灰度彩条为其相邻图像提供以摄氏度为单位的表面温度
图2显示了 LWIR 传感器的光流处理。我们的光流分析是使用OpenCV中实现的Lucas–Kanade (LK)方法计算的。该实现使用Shi-Tomasi角点检测器来识别初始图像中的突出特征块。然后使用LK 跟踪方法将这些补丁位置匹配到后续帧中。图2a显示了在应用最佳增益和偏移以最大化这对图像的对比度后,在夜间捕获的两个连续帧的结果图像。
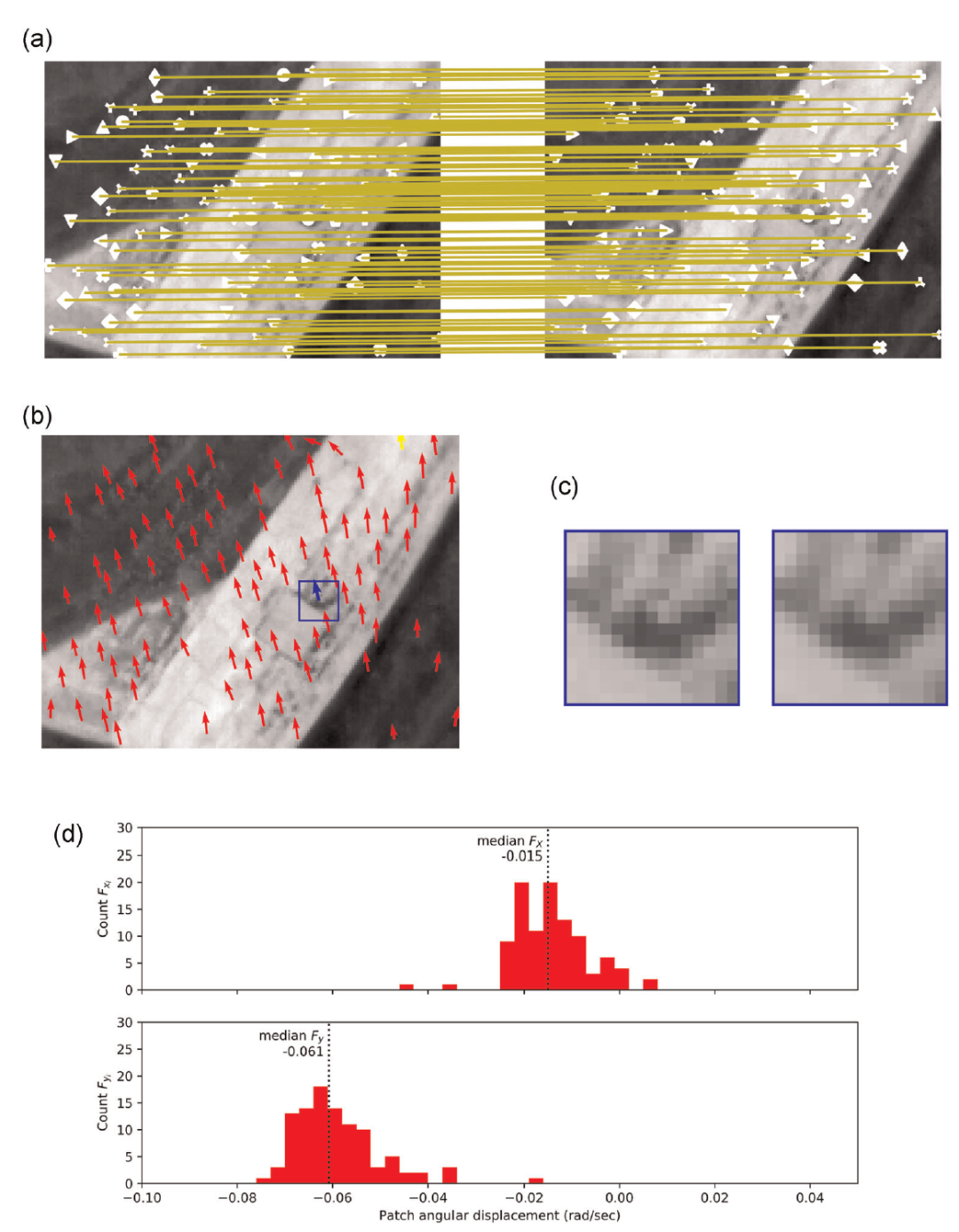
图2 长波红外传感器夜间流动处理。(a) 连续图像之间的关键点匹配。(b) 初始帧中良好特征的位移到后续图像中匹配位置的箭袋图(红色箭头)。使用的最佳(蓝色)和最差(黄色)特征用彩色箭头标注。(c)(左)初始帧中的最佳特征补丁(如(b)中注释);(右)后续帧中的匹配补丁。(d) 关键点的X和Y角位移集的直方图。
在飞行前,TF方法的经验评估如下进行。LWIR传感器针对由实验室内的环境条件设定的强度大致均匀的场景。通过将玻璃圆筒加热到环境温度以上产生的“热”标记被放置在距离传感器已知范围(2.0 m)的场景中。然后标记垂直于传感器视图移动已知距离(0.078 m)。在之前和之后的条件下都捕获了LWIR 帧。范围和距离的受控值允许对热标记特征的位移角进行数值计算。对两个框架进行热流处理以确定角位移。图3显示处理后的帧。
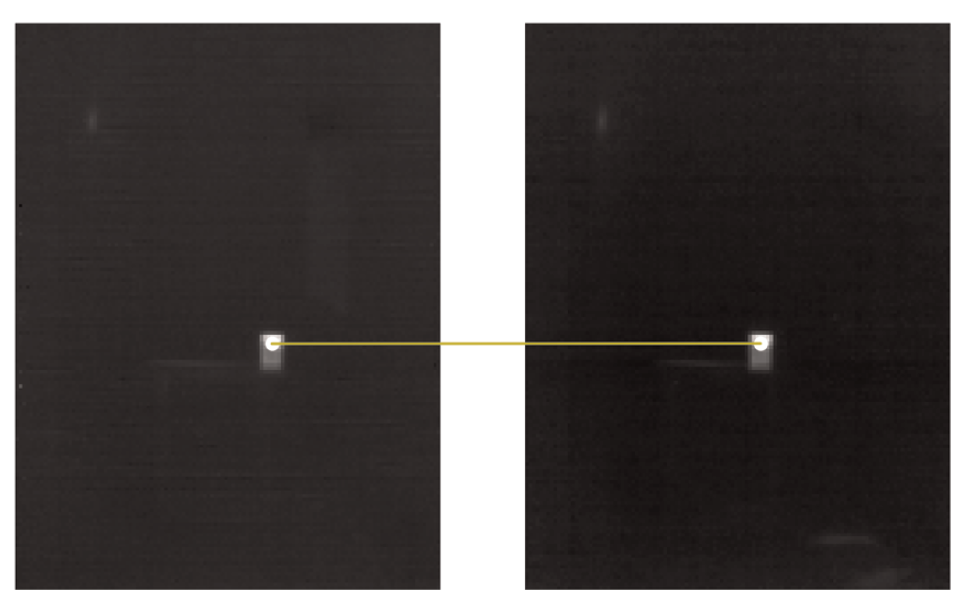
图3 LWIR 流动处理的实验室评估。评估图像之间匹配的单个热门特征
使用的固定翼飞机是三角翼配置的Zeta Science FX61机身,翼展1.5 5m,质量1.4 kg,并配备了航空电子设备以进行实验飞行。三角翼配置包括被称为升降舵的控制面,它线性地结合了传统固定翼飞机中使用的副翼和升降舵控制面的功能,以实现独立的横滚和俯仰控制。如图4所示,专门制造的飞机被组装成包含LWIR传感器在内的航空电子设备。Ardupilot开源自动驾驶仪嵌入到配备GPS和指南针模块的Pixhawk自动驾驶仪上。使用的自动驾驶配置能够以50Hz的频率更新飞机的两个升降舵控制面,这适用于控制这种类型的固定翼飞机。
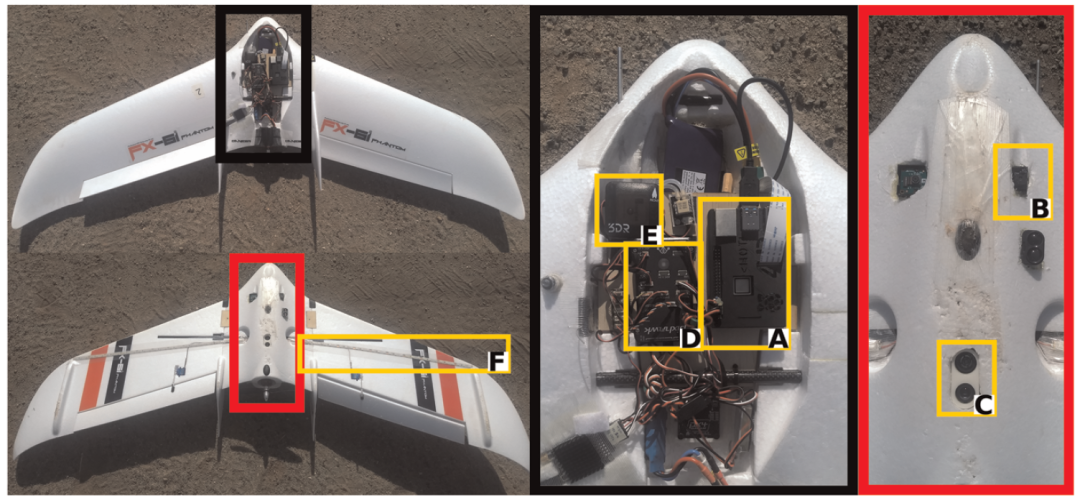
图4 实验飞机(左上)和底部(左下)的图像,顶部(中)和底部插图(右)。布局包括 (A) Raspberry Pi 嵌入式计算机,(B)LWIR 传感器,(C)PX4FLOW,(D)Pixhawk 自动驾驶仪,(E) 3DR 指南针和 UBlox GPS 模块,以及 (F)机翼照明
在整个飞行实验部分中, OGC实施的所有控制和处理均在飞机上以闭环方式完全执行,同时以全速记录所有相关信号的数据记录。如图5所示,无人机在白天和夜间条件下均手动发射,通过取消飞行前后的滑行要求,简化了夜间的地面操作。为了符合夜间飞行的运行批准,增加了机翼照明条,如图4所示。

图5 白天(左)、夜间(中)和夜间开灯飞行中的实验飞机(右)
实验是在位于南澳大利亚的一个现场进行的。选择该站点是因为它允许进行无人系统实验,包括无人机的夜间操作。在地理上,该地点是一个干旱地带景观,具有稀疏的膝盖高度的自然植被和起伏的地形。由于地处偏远,操作区域内的人工特征极少。该地点在春季和夜间都在白天和夜间使用,风力适宜,但其他情况下则晴朗温和。图6显示该站点的卫星视图和海拔地图。该场地位于已获准使用的封闭跑道附近。在实验期间,卫星地图上所有明显的河床都是干涸的。这种环境的海拔高度相当平坦,变化大约十米,确保在任何方向的飞行过程中,地面以上的高度随时间缓慢变化。
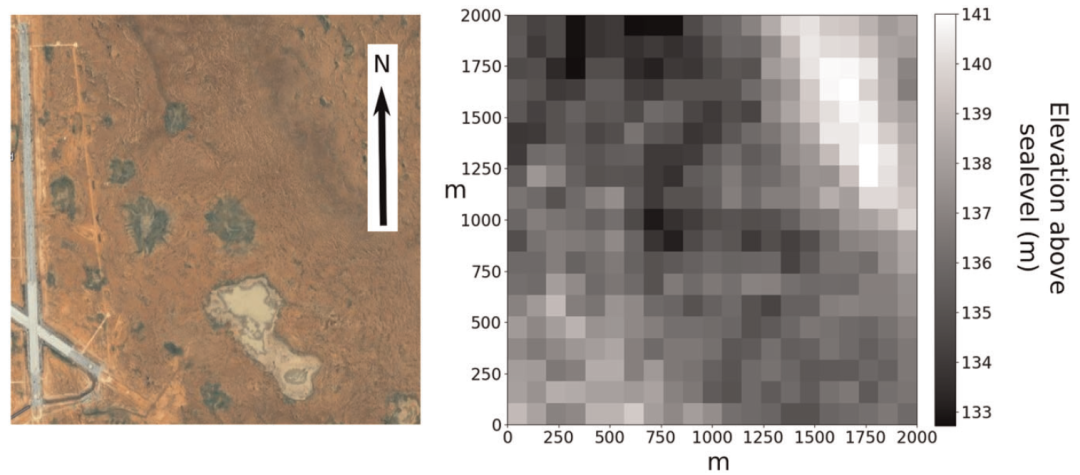
图6 实验测试地点卫星视图和海拔图
通过在天黑后在地面以上400m的高度操作无人机来定性地评估检测足够纹理的能力。这个高度是OGC-TF飞行实验的8倍,也大大高于许多国家小型无人机的监管高度上限(400 英尺)(国际民用航空组织,2019 年)。获取下方地形的LWIR图像,并应用热流处理来生成图7中的颤动图。
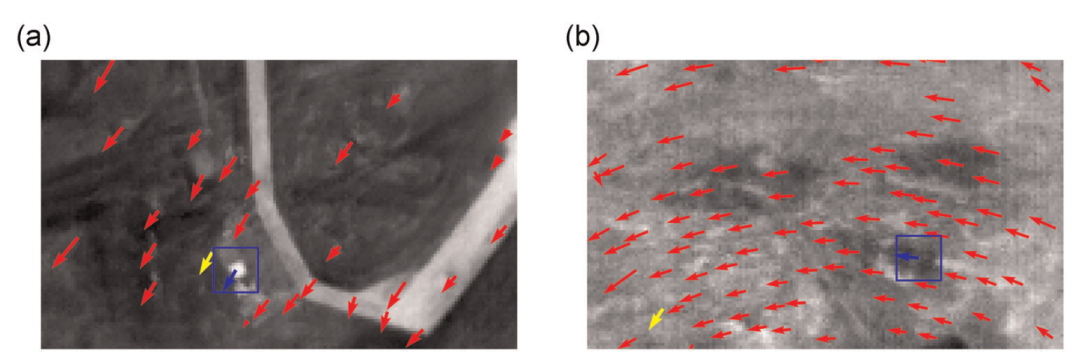
图7 从海拔 400m 处获取的图像中获得的示例图像和产生的流场。(a) 包含跑道和小型基础设施的图像,带有特征运动的颤动图。(b) 仅带有颤动图的自然场景图像。自然场景具有更多识别跟踪的特征
这项研究显示了长波红外传感器在扩展长距离低复杂度导航能力以允许在黑暗条件下操作方面的实用性。使用低成本、商用技术和低分辨率、低帧率LWIR传感器已经证明了扩展到这个具有挑战性的领域。
源自:https://doi-org.uconn.80599.net/10.1002/rob.22015
本文仅做学术分享,如有侵权,请联系删文。