
调参侠看过来!两个提高深度学习训练效率的绝技

图片来自HBO电视剧《硅谷》
1. 训练的瓶颈在哪里
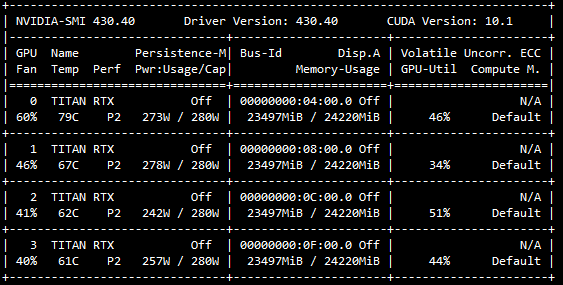
GPU利用率低:模型训练时GPU显存沾满了,但是GPU的利用率比较不稳定,有时候0%,有时候90%,忽高忽低。
训练的数据量大:训练数据大,在百万/千万的量级,训练一个Epoch需要很长时间,模型迭代周期过长。
2. 提高GPU利用率:CPU vs GPU
GPU利用率低, 主要原因是CPU处理的效率跟不上GPU
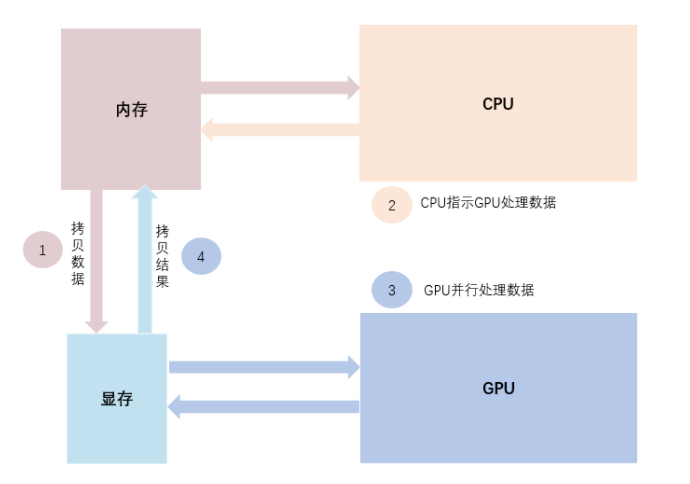
2.1 CPU vs GPU的通信
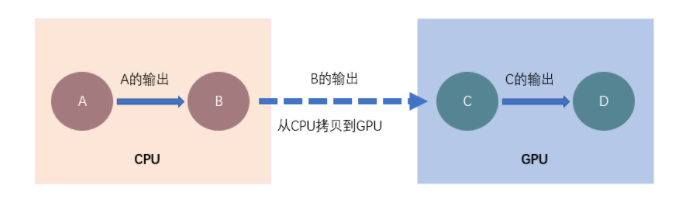
CPU负责加载数据+数据预处理,并不断的在内存和显存之间交互数据 GPU负责模型训练(图片来自网络)
2.2 解决方案
采用多进程并行处理,加快CPU加载数据的性能
keras keras 中提供了 workersuse_multiprocessing来采用多进程方式,并行处理数据,并push到队列中,共GPU模型训练。因为进程之间可能相互影响资源,并不是越大越好,workers可以设置2,4,8。run_model.fit_generator(
generator=training_generator,
class_weight={0: config.weights, 1: 1},
epochs=epochs,
verbose=1,
steps_per_epoch=steps_per_epoch,
callbacks=callbacks_list,
validation_data=valid_generator,
validation_steps=validation_steps,
shuffle=True,
workers=8,
use_multiprocessing=True,
max_queue_size=20pytorch torch在加载数据中提供类似参数 num_workers。pin_memory=True可以直接加载到显存中,而不需要内存torch.utils.data.DataLoader(image_datasets[x],
batch_size=batch_size,
shuffle=True,
num_workers=8,
pin_memory=True)
3. 分布式并行训练
3.1 并行模式
当训练的数据量很大时,可以通过多个机器多个GPU来提高训练的效率。不同于hadoop和spark等分布式数据处理框架,深度学习训练因为要涉及参数的前项传播和反向传播,有两种并行方式:
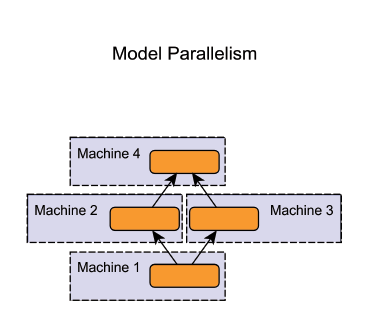
模型并行( model parallelism ):分布式系统中的不同机器(GPU/CPU等)负责网络模型的不同部分,通常是神经网络模型的不同网络层被分配到不同的机器,或者同一层内部的不同参数被分配到不同机器。一般是超大的模型,一张显卡放不下的情况,如NLP的模型。模型并行的缺点是层和层之间可能存在依赖关系,不能完全的并行。(图片来自网络)
数据并行( data parallelism ):不同的机器有同一个模型的多个副本,每个机器分配到不同的数据,然后将所有机器的计算结果按照某种方式合并。这种就比较适合大数据的情况。数据并行要解决的问题是数据的分割和传输,以及参数的更新。
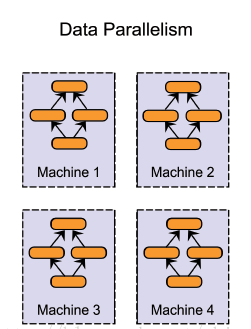
3.2 数据并行
Facebook在《Accurate, Large Minibatch SGD: Training ImageNet in 1 Hour》介绍了使用 256 块 GPU 进行 ResNet-50 网络「数据并行」训练的方法
数据分割: 选用大的batch-size, 按照worker数量进行分割, 分发到不同worker执行 参数更新:参数的更新有两种模式(1)参数服务器 (2) ring环状更新(无服务器模式)
3.2.1 参数服务器模式
参数服务器模式,见下图。在每个worker执行完一个batch的训练后,反向传播参数的时候,所有的worker都会把参数传给参数服务器,进行汇总求均值,之后再传给每个worker,进入第二个batch的训练。(图片来自网络)
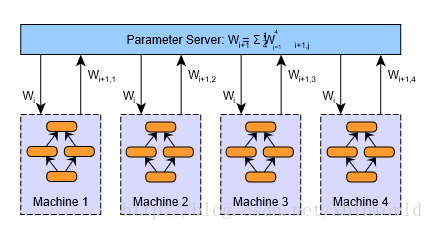
参数服务器有一个或者多个的结构模式,可以看出这种数据并行的模式效率是否提升取决于参数服务器与worker之间的通信效率,也就是最慢的worker的训练时间和参数服务器的接收和更新参数后再回传的时间。worker数量多的话,参数服务器可能存在瓶颈。(图片来自网络)
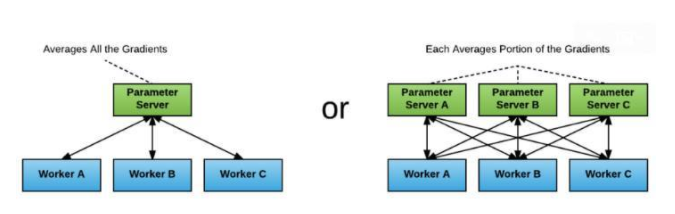
3.2.2 ring-reduce
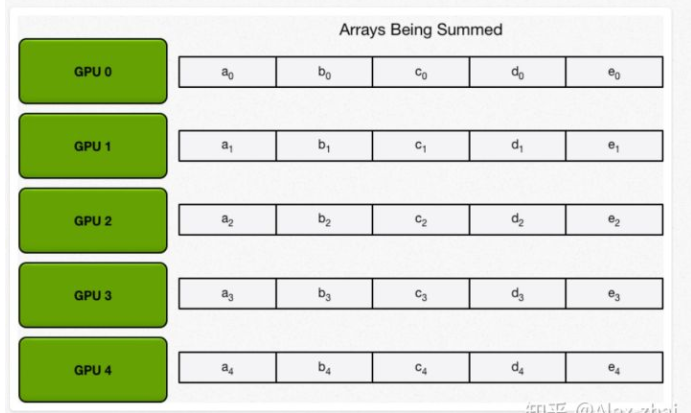
百度提出的ring-reduce摒弃了参数服务器,采用环状结构来更新参数。ring-reduce把所有的worker组成一个两两相邻的环形结构。每个worker只与相邻的worker交换参数。经过几次交换之后,所有的worker都包含其他worker的参数信息,达到更新的目的。(图片来自网络)
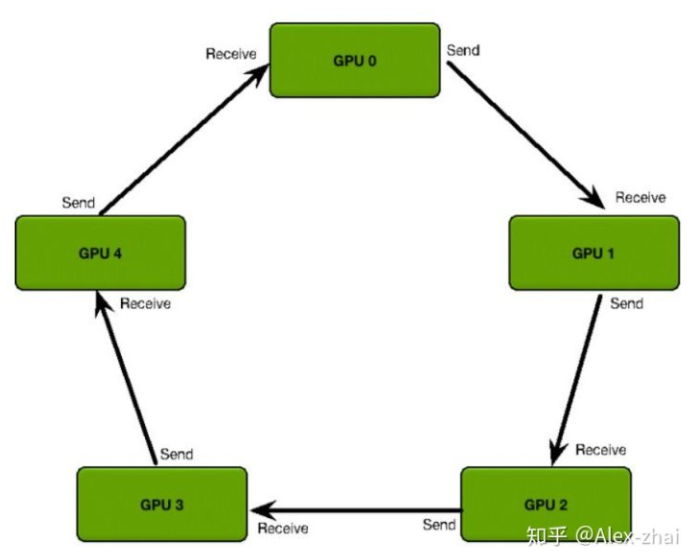
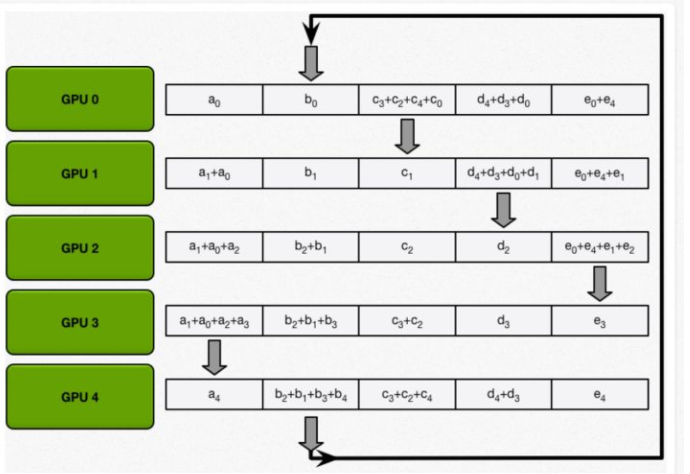
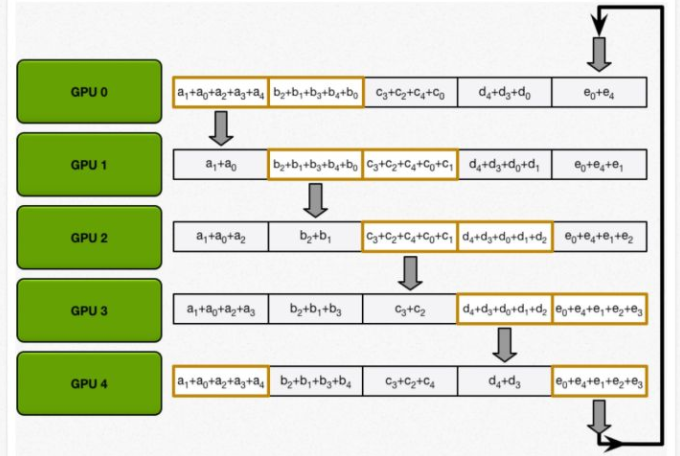
下面几张图,可以看到其中的几个步骤;ring-reduce为了加快速度,并不是一次性交换所有的参数;而是先把参数进行分割,不断交换分割后参数。
4. 实现框架:Horovod
Horovod 是 Uber 开源的又一个深度学习工具,它的发展吸取了 Facebook「一小时训练 ImageNet 论文」与百度 Ring Allreduce 的优点,可为用户实现分布式训练提供帮助。https://github.com/horovod/horovod
采用NCCL 替换百度的 ring-allreduce 实现。NCCL 是英伟达的集合通信库,提供高度优化的 ring-allreduce 版本。NCCL 2 允许在多个机器之间运行 ring-allreduc。
如果要把单机的训练代码修改成分布式的代码,只要几个步骤就可以了 改造分布式训练:
horovod安装 建议安装docker的horovod,省去安装环境的麻烦。horovod依赖
NCCL 2open MPI$ mkdir horovod-docker-gpu
$ wget -O horovod-docker-gpu/Dockerfile https://raw.githubusercontent.com/horovod/horovod/master/Dockerfile.gpu
$ docker build -t horovod:latest horovod-docker-gpu机器worker机器之间ssh打通
修改训练代码 horovod支持tf,keras,pytorch和mxnet等不同的深度学习框架。以keras为例,修改主要6个步骤 (1) 初始化:hvd.init() (2)分配GPU计算资源:
config.gpu_options.visible_device_list = str(hvd.local_rank())(3)分布式的优化器来实现参数的分布式更新:opt = hvd.DistributedOptimizer(opt)(4)定义所有worker模型初始化一致性hvd.callbacks.BroadcastGlobalVariablesCallback(0)(5)模型保存在某一个workerfrom __future__ import print_function
import keras
from keras.datasets import mnist
from keras.models import Sequential
from keras.layers import Dense, Dropout, Flatten
from keras.layers import Conv2D, MaxPooling2D
from keras import backend as K
import math
import tensorflow as tf
import horovod.keras as hvd
# Horovod: initialize Horovod.
hvd.init()
# Horovod: pin GPU to be used to process local rank (one GPU per process)
config = tf.ConfigProto()
config.gpu_options.allow_growth = True
config.gpu_options.visible_device_list = str(hvd.local_rank())
K.set_session(tf.Session(config=config))
batch_size = 128
num_classes = 10
# Horovod: adjust number of epochs based on number of GPUs.
epochs = int(math.ceil(12.0 / hvd.size()))
# Input image dimensions
img_rows, img_cols = 28, 28
# The data, shuffled and split between train and test sets
(x_train, y_train), (x_test, y_test) = mnist.load_data()
if K.image_data_format() == 'channels_first':
x_train = x_train.reshape(x_train.shape[0], 1, img_rows, img_cols)
x_test = x_test.reshape(x_test.shape[0], 1, img_rows, img_cols)
input_shape = (1, img_rows, img_cols)
else:
x_train = x_train.reshape(x_train.shape[0], img_rows, img_cols, 1)
x_test = x_test.reshape(x_test.shape[0], img_rows, img_cols, 1)
input_shape = (img_rows, img_cols, 1)
x_train = x_train.astype('float32')
x_test = x_test.astype('float32')
x_train /= 255
x_test /= 255
print('x_train shape:', x_train.shape)
print(x_train.shape[0], 'train samples')
print(x_test.shape[0], 'test samples')
# Convert class vectors to binary class matrices
y_train = keras.utils.to_categorical(y_train, num_classes)
y_test = keras.utils.to_categorical(y_test, num_classes)
model = Sequential()
model.add(Conv2D(32, kernel_size=(3, 3),
activation='relu',
input_shape=input_shape))
model.add(Conv2D(64, (3, 3), activation='relu'))
model.add(MaxPooling2D(pool_size=(2, 2)))
model.add(Dropout(0.25))
model.add(Flatten())
model.add(Dense(128, activation='relu'))
model.add(Dropout(0.5))
model.add(Dense(num_classes, activation='softmax'))
# Horovod: adjust learning rate based on number of GPUs.
opt = keras.optimizers.Adadelta(1.0 * hvd.size())
# Horovod: add Horovod Distributed Optimizer.
opt = hvd.DistributedOptimizer(opt)
model.compile(loss=keras.losses.categorical_crossentropy,
optimizer=opt,
metrics=['accuracy'])
callbacks = [
# Horovod: broadcast initial variable states from rank 0 to all other processes.
# This is necessary to ensure consistent initialization of all workers when
# training is started with random weights or restored from a checkpoint.
hvd.callbacks.BroadcastGlobalVariablesCallback(0),
]
# Horovod: save checkpoints only on worker 0 to prevent other workers from corrupting them.
if hvd.rank() == 0:
callbacks.append(keras.callbacks.ModelCheckpoint('./checkpoint-{epoch}.h5'))
model.fit(x_train, y_train,
batch_size=batch_size,
callbacks=callbacks,
epochs=epochs,
verbose=1,
validation_data=(x_test, y_test))
score = model.evaluate(x_test, y_test, verbose=0)
print('Test loss:', score[0])
print('Test accuracy:', score[1])利用horovodrun 执行分布式训练
horovodrun -np 16 -H server1:4,server2:4,server3:4,server4:4 python train.py
5. 总结
本文分享了通过GPU利用率和分布式训练Horovod框架来提升深度学习训练。
并行CPU加载数据和预处理,让GPU不再等待CPU 采用Horovod让数据并行来提高大数据量的训练的迭代时间
作者简介:wedo实验君, 数据分析师;热爱生活,热爱写作
赞 赏 作 者
Python中文社区作为一个去中心化的全球技术社区,以成为全球20万Python中文开发者的精神部落为愿景,目前覆盖各大主流媒体和协作平台,与阿里、腾讯、百度、微软、亚马逊、开源中国、CSDN等业界知名公司和技术社区建立了广泛的联系,拥有来自十多个国家和地区数万名登记会员,会员来自以工信部、清华大学、北京大学、北京邮电大学、中国人民银行、中科院、中金、华为、BAT、谷歌、微软等为代表的政府机关、科研单位、金融机构以及海内外知名公司,全平台近20万开发者关注。
长按扫码添加“Python小助手”
▼点击成为社区会员 喜欢就点个在看吧