
机器视觉篇之相机标定
共 1344字,需浏览 3分钟
·
2021-06-03 17:40
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

本文转自|新机器视觉
在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。在大多数条件下这些参数必须通过实验与计算才能得到,这个求解参数的过程就称之为相机标定(或摄像机标定)。无论是在图像测量或者机器视觉应用中,相机参数的标定都是非常关键的环节,其标定结果的精度及算法的稳定性直接影响相机工作产生结果的准确性。
下面实例中采用静态九点标定法,从相机中取好照片,做手动标定。
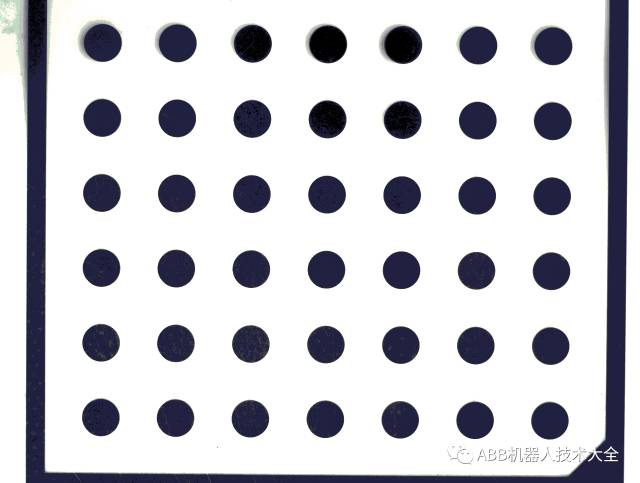
下图为标定板,规格为2-7×7,此图没显示完,不影响实际标定,因为只取图中九点。
选择某款视觉平台软件,识别图像中圆的像素坐标值,这里没有太多要求,只做介绍,其它软件识别方法或原理类似。
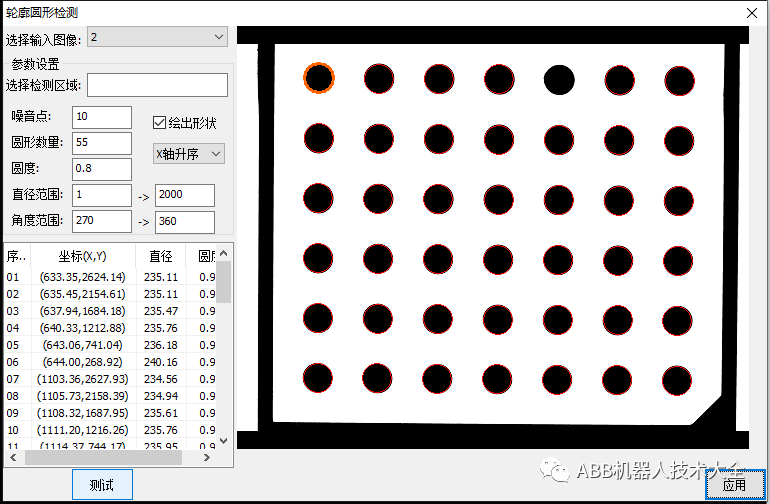
如上图表格显示数据所示,图中42个圆的直径、圆度、像素坐标都已识别得出结果。我们选其中九个点X,Y的像素坐标值做为标定点,并规定好与实际应用的X,Y方向。这里演示规定,以图像的左下角为原点(0,0),那么规定向上为硬件实际的X方向,图片的右边规定为硬件实际的Y方向。
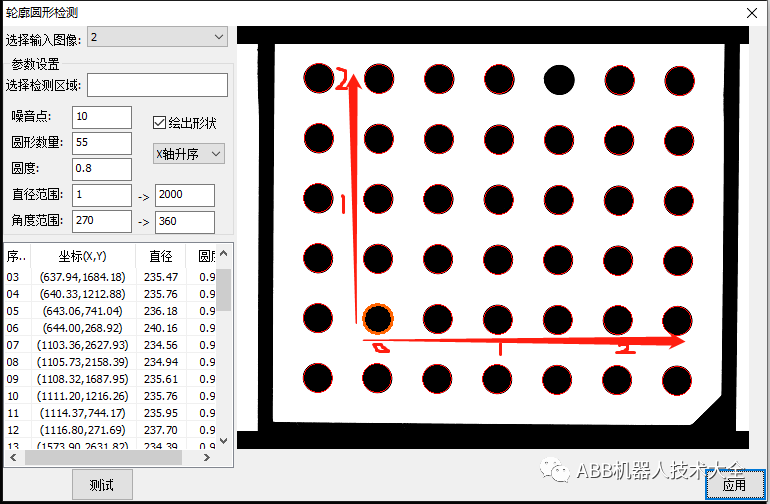
如上图建立坐标系,对应好九个点的像素坐标跟实际坐标,如下表格所示。
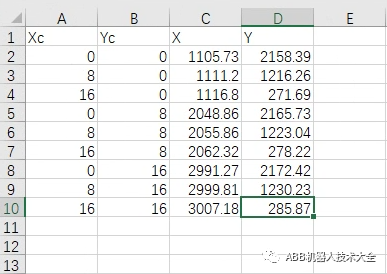
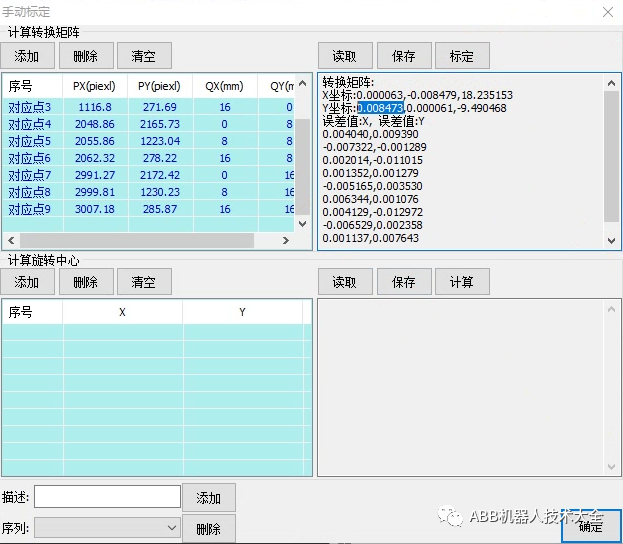
选择某款视觉软件,进行手动标定,这里没有太多要求,只做介绍,其它品牌软件标定方法或原理类似。把上面列好值输入到软件中,得到6个标定数据。
如有机器人需要建立好实际的坐标系,跟相机进行关联。取标定好的数据,进行图像数据转化,实现位置纠偏等功能。
 End
End
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~