
立体视觉入门指南:相机标定之Zhang式标定法
技术来自于点击下方卡片,关注“新机器视觉”公众号
视觉/图像重磅干货,第一时间送达
本课程是电子资源,所以行文并不会有太多条条框框的约束,但会以逻辑清晰、浅显易懂为目标,水平有限,若有不足之处,还请不吝赐教! 个人微信:EthanYs6,加我申请进技术交流群 StereoV3D,一起技术畅聊。 CSDN搜索 :Ethan Li 李迎松,查看网页版课程。 随课代码,将上传至github上,地址:StereoV3DCode:ethan-li-coding/StereoV3DCode(https://github.com/ethan-li-coding/StereoV3DCode)
 所谓标定,即是由大量观测值拟合参数模型的过程,且在此拟合的参数模型是已知的,所以应尽可能探索能便捷获取大量观测值的方案,如果观测值之间还满足一些其他的几何约束就更有助于求解具体单个参数值。
所谓标定,即是由大量观测值拟合参数模型的过程,且在此拟合的参数模型是已知的,所以应尽可能探索能便捷获取大量观测值的方案,如果观测值之间还满足一些其他的几何约束就更有助于求解具体单个参数值。
实施方法

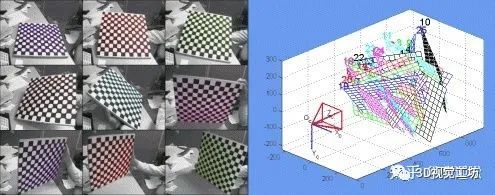
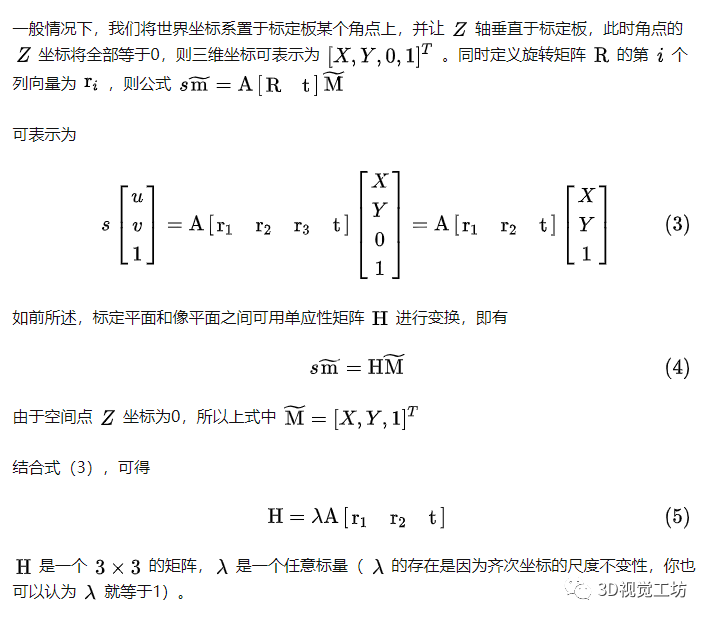
 坐标等于0的三维坐标(将世界坐标系的原点放在标定板的某个角点,Z轴垂直于标定板)。
坐标等于0的三维坐标(将世界坐标系的原点放在标定板的某个角点,Z轴垂直于标定板)。
定义
单应性矩阵
对内参的约束
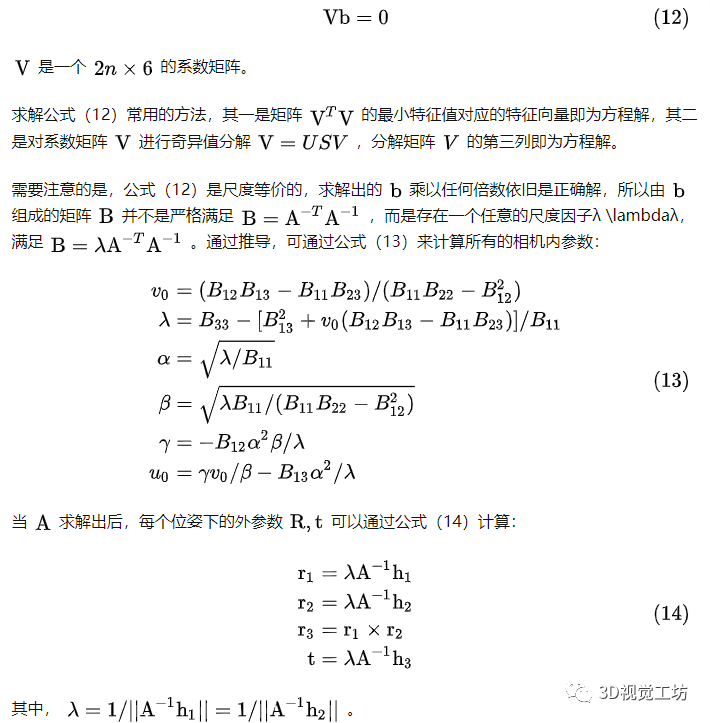
相机参数求解
闭合解

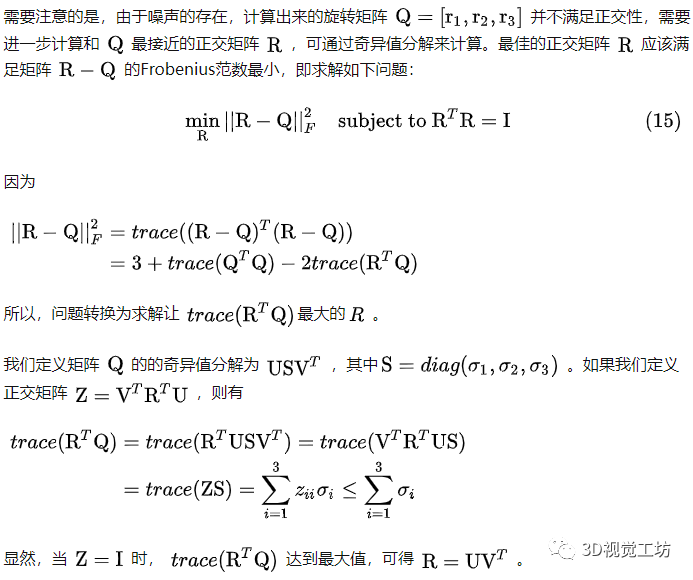
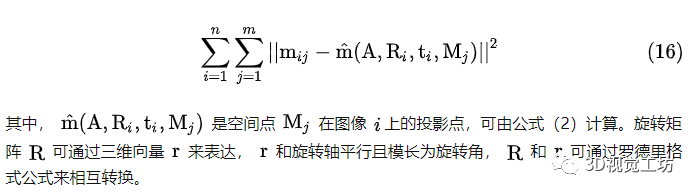
最大似然估计
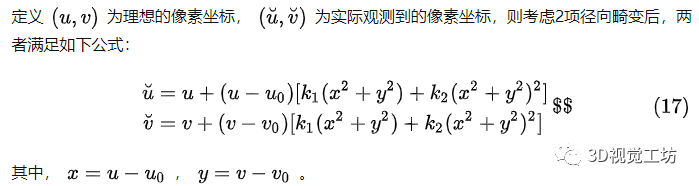
相机畸变

总结
1 通过opencv开源库提供的接口完成相机标定,可使用opencv提供的图像,也可使用自己的图像。
2 更高阶的是,你能够自己不依赖opencv库写一套相机标定算法吗?或者只使用opencv来检测角点坐标,其他步骤自己来实现。
参考答案地址:https://github.com/ethan-li-coding/StereoV3DCode
参考文献
评论