实操教程|Pytorch-lightning的使用
共 12034字,需浏览 25分钟
·
2021-05-20 11:03
极市导读
Pytorch-lightning可以非常简洁得构建深度学习代码。但是其实大部分人用不到很多复杂得功能,并且用的时候稍微有一些不灵活。本文作者分享了自己在使用时的一些心得,附有代码链接。 >>加入极市CV技术交流群,走在计算机视觉的最前沿
Pytorch-lightning(以下简称pl)可以非常简洁得构建深度学习代码。但是其实大部分人用不到很多复杂得功能。而pl有时候包装得过于深了,用的时候稍微有一些不灵活。通常来说,在你的模型搭建好之后,大部分的功能都会被封装在一个叫trainer的类里面。一些比较麻烦但是需要的功能通常如下:
-
保存checkpoints -
输出log信息 -
resume training 即重载训练,我们希望可以接着上一次的epoch继续训练 -
记录模型训练的过程(通常使用tensorboard) -
设置seed,即保证训练过程可以复制
好在这些功能在pl中都已经实现。
由于doc上的很多解释并不是很清楚,而且网上例子也不是特别多。下面分享一点我自己的使用心得。
首先关于设置全局的种子:
from pytorch_lightning import seed_everything
# Set seedseed = 42seed_everything(seed)
只需要import如上的seed_everything函数即可。它应该和如下的函数是等价的:
def seed_all(seed_value): random.seed(seed_value) # Python np.random.seed(seed_value) # cpu vars torch.manual_seed(seed_value) # cpu vars if torch.cuda.is_available(): print ('CUDA is available') torch.cuda.manual_seed(seed_value) torch.cuda.manual_seed_all(seed_value) # gpu vars torch.backends.cudnn.deterministic = True #needed torch.backends.cudnn.benchmark = False
seed=42seed_all(seed)
但经过我的测试,好像pl的seed_everything函数应该更全一点。
下面通过一个具体的例子来说明一些使用方法:
先下载、导入必要的包和下载数据集:
!pip install pytorch-lightning!wget https://download.pytorch.org/tutorial/hymenoptera_data.zip!unzip -q hymenoptera_data.zip!rm hymenoptera_data.zip
import pytorch_lightning as plimport osimport numpy as np import randomimport matplotlib.pyplot as plt
import torchimport torch.nn.functional as Fimport torchvisionimport torchvision.transforms as transforms
以下代码种加入!的代码是在terminal中运行的。在google colab中运行linux命令需要在之前加!
如果是使用google colab,由于它创建的是一个虚拟机,不能及时保存,所以如果需要保存,挂载自己google云盘也是有必要的。使用如下的代码:
from google.colab import drivedrive.mount('./content/drive')
import osos.chdir("/content/drive/My Drive/")
先如下定义如下的LightningModule和main函数。
class CoolSystem(pl.LightningModule):def __init__(self, hparams):super(CoolSystem, self).__init__()self.params = hparamsself.data_dir = self.params.data_dirself.num_classes = self.params.num_classes########## define the model ##########arch = torchvision.models.resnet18(pretrained=True)num_ftrs = arch.fc.in_featuresmodules = list(arch.children())[:-1] # ResNet18 has 10 childrenself.backbone = torch.nn.Sequential(*modules) # [bs, 512, 1, 1]self.final = torch.nn.Sequential(torch.nn.Linear(num_ftrs, 128),torch.nn.ReLU(inplace=True),torch.nn.Linear(128, self.num_classes),torch.nn.Softmax(dim=1))def forward(self, x):x = self.backbone(x)x = x.reshape(x.size(0), -1)x = self.final(x)return xdef configure_optimizers(self):# REQUIREDoptimizer = torch.optim.SGD([{'params': self.backbone.parameters()},{'params': self.final.parameters(), 'lr': 1e-2}], lr=1e-3, momentum=0.9)exp_lr_scheduler = torch.optim.lr_scheduler.StepLR(optimizer, step_size=7, gamma=0.1)return [optimizer], [exp_lr_scheduler]def training_step(self, batch, batch_idx):# REQUIREDx, y = batchy_hat = self.forward(x)loss = F.cross_entropy(y_hat, y)_, preds = torch.max(y_hat, dim=1)acc = torch.sum(preds == y.data) / (y.shape[0] * 1.0)self.log('train_loss', loss)self.log('train_acc', acc)return {'loss': loss, 'train_acc': acc}def validation_step(self, batch, batch_idx):# OPTIONALx, y = batchy_hat = self.forward(x)loss = F.cross_entropy(y_hat, y)_, preds = torch.max(y_hat, 1)acc = torch.sum(preds == y.data) / (y.shape[0] * 1.0)self.log('val_loss', loss)self.log('val_acc', acc)return {'val_loss': loss, 'val_acc': acc}def test_step(self, batch, batch_idx):# OPTIONALx, y = batchy_hat = self.forward(x)loss = F.cross_entropy(y_hat, y)_, preds = torch.max(y_hat, 1)acc = torch.sum(preds == y.data) / (y.shape[0] * 1.0)return {'test_loss': loss, 'test_acc': acc}def train_dataloader(self):# REQUIREDtransform = transforms.Compose([transforms.RandomResizedCrop(224),transforms.RandomHorizontalFlip(),transforms.ToTensor(),transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])])train_set = torchvision.datasets.ImageFolder(os.path.join(self.data_dir, 'train'), transform)train_loader = torch.utils.data.DataLoader(train_set, batch_size=32, shuffle=True, num_workers=4)return train_loaderdef val_dataloader(self):transform = transforms.Compose([transforms.Resize(256),transforms.CenterCrop(224),transforms.ToTensor(),transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])])val_set = torchvision.datasets.ImageFolder(os.path.join(self.data_dir, 'val'), transform)val_loader = torch.utils.data.DataLoader(val_set, batch_size=32, shuffle=True, num_workers=4)return val_loaderdef test_dataloader(self):transform = transforms.Compose([transforms.Resize(256),transforms.CenterCrop(224),transforms.ToTensor(),transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])])val_set = torchvision.datasets.ImageFolder(os.path.join(self.data_dir, 'val'), transform)val_loader = torch.utils.data.DataLoader(val_set, batch_size=8, shuffle=True, num_workers=4)return val_loaderdef main(hparams):model = CoolSystem(hparams)trainer = pl.Trainer(max_epochs=hparams.epochs,gpus=1,accelerator='dp')trainer.fit(model)
下面是run的部分:
from argparse import Namespace
args = { 'num_classes': 2, 'epochs': 5, 'data_dir': "/content/hymenoptera_data",}
hyperparams = Namespace(**args)
if __name__ == '__main__': main(hyperparams)
如果希望重载训练的话,可以按如下方式:
# resume training
RESUME = True
if RESUME: resume_checkpoint_dir = './lightning_logs/version_0/checkpoints/' checkpoint_path = os.listdir(resume_checkpoint_dir)[0] resume_checkpoint_path = resume_checkpoint_dir + checkpoint_path
args = { : 2, : "/content/hymenoptera_data"}
hparams = Namespace(**args)
model = CoolSystem(hparams)
trainer = pl.Trainer(gpus=1, max_epochs=10, accelerator='dp', resume_from_checkpoint = resume_checkpoint_path)
trainer.fit(model)
如果我们想要从checkpoint加载模型,并进行使用可以按如下操作来:
import matplotlib.pyplot as pltimport numpy as np
# functions to show an imagedef imshow(inp): inp = inp.numpy().transpose((1, 2, 0)) mean = np.array([0.485, 0.456, 0.406]) std = np.array([0.229, 0.224, 0.225]) inp = std * inp + mean inp = np.clip(inp, 0, 1) plt.imshow(inp) plt.show()
classes = ['ants', 'bees']
checkpoint_dir = 'lightning_logs/version_1/checkpoints/'checkpoint_path = checkpoint_dir + os.listdir(checkpoint_dir)[0]
checkpoint = torch.load(checkpoint_path)model_infer = CoolSystem(hparams)model_infer.load_state_dict(checkpoint['state_dict'])
try_dataloader = model_infer.test_dataloader()
inputs, labels = next(iter(try_dataloader))
# print images and ground truthimshow(torchvision.utils.make_grid(inputs))print('GroundTruth: ', ' '.join('%5s' % classes[labels[j]] for j in range(8)))
# inferenceoutputs = model_infer(inputs)
_, preds = torch.max(outputs, dim=1)# print (preds)print (torch.sum(preds == labels.data) / (labels.shape[0] * 1.0))
print('Predicted: ', ' '.join('%5s' % classes[preds[j]] for j in range(8)))
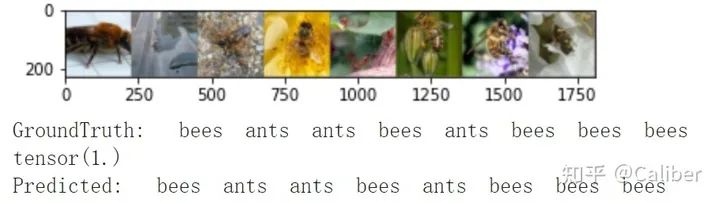
预测结果如上。
如果希望检测训练过程(第一部分+重载训练的部分),如下:
tensorboard
%load_ext tensorboardtensorboard --logdir = ./lightning_logs
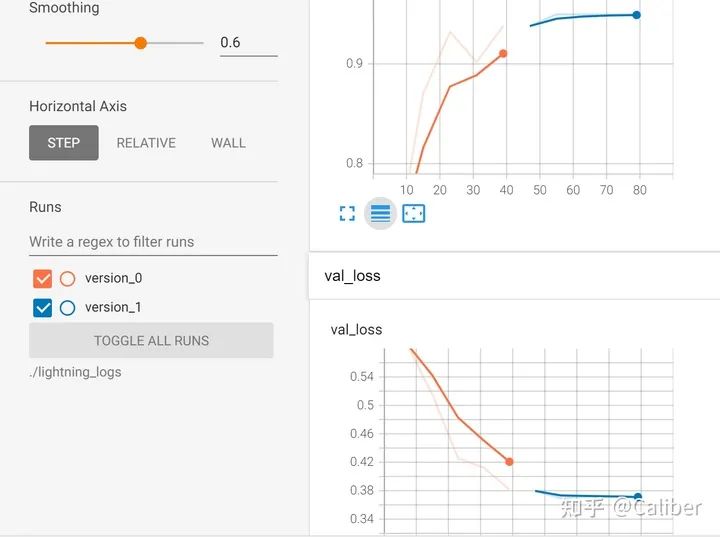
训练过程在tensorboard里面记录,version0是第一次的训练,version1是重载后的结果。
完整的code在这里.
https://colab.research.google.com/gist/calibertytz/a9de31175ce15f384dead94c2a9fad4d/pl_tutorials_1.ipynb
如果觉得有用,就请分享到朋友圈吧!
公众号后台回复“目标检测”获取目标检测算法综述盘点~

# CV技术社群邀请函 #
备注:姓名-学校/公司-研究方向-城市(如:小极-北大-目标检测-深圳)
即可申请加入极市目标检测/图像分割/工业检测/人脸/医学影像/3D/SLAM/自动驾驶/超分辨率/姿态估计/ReID/GAN/图像增强/OCR/视频理解等技术交流群
每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度等名校名企视觉开发者互动交流~