
工业界大场景SLAM的一点探索
点击下方卡片,关注“新机器视觉”公众号
视觉/图像重磅干货,第一时间送达
作者:Yusheng
https://zhuanlan.zhihu.com/p/402344909
文章仅用于学术分享。
5年前开始接手大场景的SLAM重建,到现在适配过各种常见型号雷达,不同的INS,RTK,另外还有诸如轮速,chassis info,4G/5G通讯定位等信号的输入,处理过许多复杂场景,例如隧道,严重堵车等环境。
最近刚好在做一个超过50km的城市建图数据,效果还挺不错的,跟大家分享一下处理过程:
视频见:
https://www.bilibili.com/video/BV17q4y1D787
数据采集&数据准备
采集车是一辆红旗H9轿车,用到的雷达是顶部的一台128线雷达,组合导航设备是一台平凡无奇的车用级组合导航设备,车辆搭载了8摄像头的周视系统,所有传感器都经过预标定。
采集路线是从武汉的华中智谷到创意城,单程25km多,往返超过了50km,每10s采集一个sequence,总共采集了424个sequence。
由于自己对自己的算法非常有信心(测试过超20T各种数据),于是乎直接上手拿SLAM撸建图,数据准备方面,将数百个sequence按200s一个bag,组合成若干个rosbag,这里为了减小存储量,只提取了前视摄像头,lidar,ins,chassis,轮速的信息出来。
坐标系转换,BLH肯定得转UTM的,所以前端做了一个重发布
点云赋色,基于标定结果反算了一下发现标定精度还是蛮高的,所以又做了点云赋色的进程

数据处理&优化
主要的优化包括以下几点
由于这个组合导航设备蛮垃圾的,即使显示RTK FIX了,但是定位结果还是很差,有时候经纬度还是负数,于是单独开发了一个基于原始数据的RTK程序,让RTKFIX这个值变得稳定,后来又发现即使RTK FIX了,INS的输出有时候还是一团糟,所以做了一个组合导航的滤波,对数据进行了进一步处理,让INS的输出可用。
多线程的管理,赋色,优化,存储,显示这些都做了优化。
地图存储&优化,最后做到200s数据4 Gib大小的地图,10s内能存储完毕。
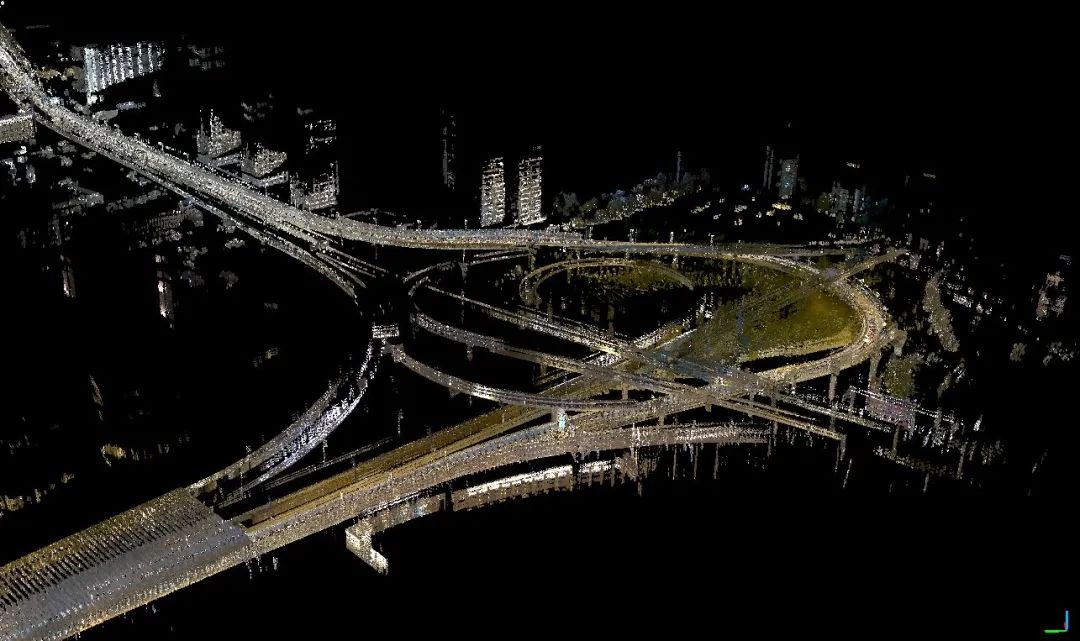
结果展示
懒得放Google Earth上的轨迹了,将就一下:


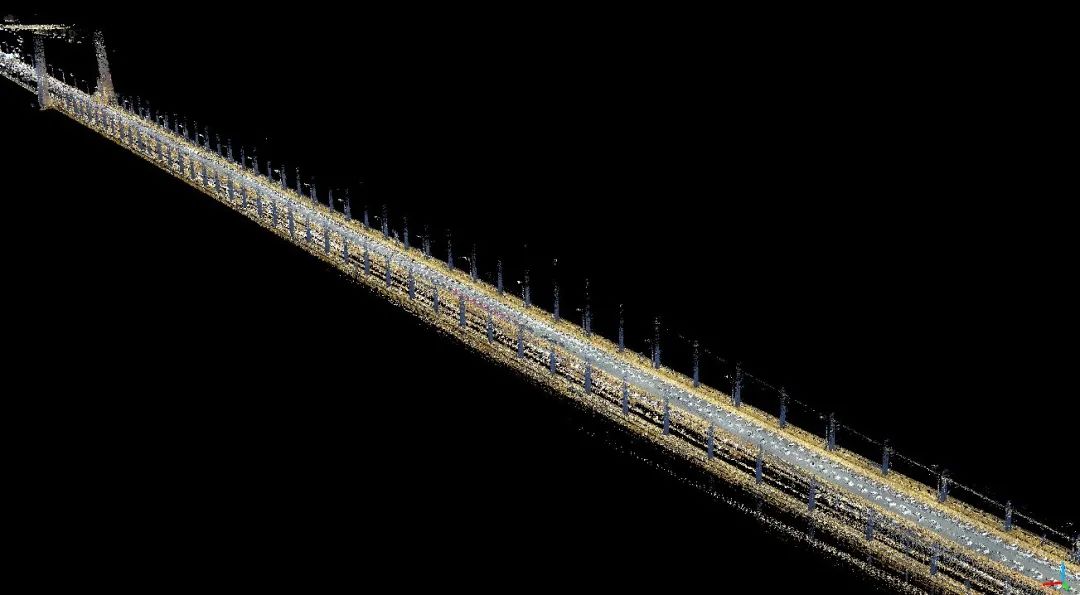
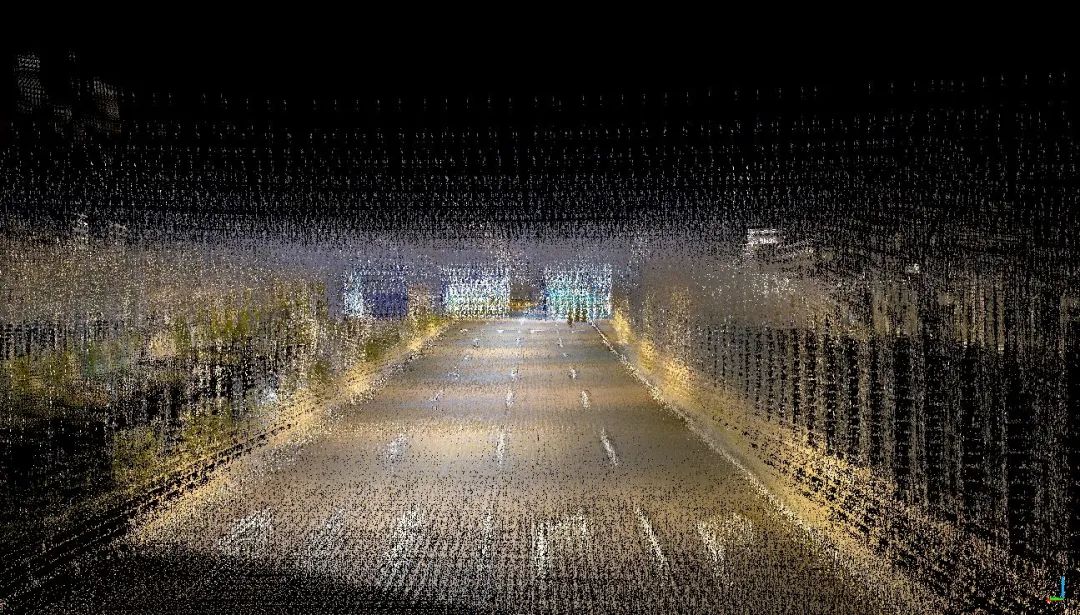
由于是要给图商做标注的,所以车道线必须明显

现在的难点一是地图精度评定,二是动态物体去除,一只能借助测绘手段才行,二的话用过一些方法还行,但是无法彻底去除,还得研究研究
—版权声明—
仅用于学术分享,版权属于原作者。
若有侵权,请联系微信号:yiyang-sy 删除或修改!