
基于OpenCV的人脸追踪
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达
在Raspberry上启动项目很简单,所以让我们开始吧。
Raspberry Pi 4 Model B — 4GB
适用于Raspberry Pi的Pan-Tilt HAT
Pi Camera v2 8MP
微型SD卡
迷你HDMI电缆
Raspberry Pi摄像头电缆—尺寸:457mm x 16mm(18“ x 0.6”)
USB-C充电器
USB-C外接电池(强烈建议选购)
云台HAT的选择是非常重要的。因为我们必须找到一种控制Pan-Tilt HAT的方法。我们使用的是Waveshare的Pan-Tilt HAT,小伙伴们可能需要花费一些时间来了解如何通过键盘或者通过HAT手动控制伺服电机。USB-C输出的电池对于Raspberry上的项目(其中Raspberry必须是可移动的)非常有用。
安装Raspberry操作系统:您可以选择任何Python可以正常运行的系统。这是Raspberry OS的官方页面:https : //www.raspberrypi.org/downloads。推荐使用Raspberry Pi OS
为树莓派启用Pi相机
在Raspberry上启用SSH
安装Python,建议使用版本3
建议安装OpenCV 4.2版
如果Python缺少某些模块,请不要担心,并在Raspberry或Python社区中搜索其安装
这部分对我们来说比较困难,为什么会有一定的困难?因为,有两种方法可以控制伺服电机:
直接将伺服电机插入Raspberry,然后直接通过Raspberry控制它们,在这种情况下,需要使用GPIO接口
将伺服电机插入HAT平台,然后将HAT插入Raspberry。因此,我们需要先控制HAT平台,然后再由HAT平台控制我们的伺服电机。在这种情况下可以使用waveshare PCA9685提供的给定驱动程序
这部分虽然不是强制性的,但强烈建议使用。

伺服轴的螺丝
重要的是,一开始就不要拧紧伺服轴的螺钉,只需以可以自由旋转的方式稍微固定一下即可。使用键盘上的控件,大家可以尝试在0位置旋转舵机,然后将摄像机移动到首选的起始位置,现在可以拧紧伺服轴的螺钉。(云台螺钉在底座下方,因此我们需要在基座上安装云台,然后进行校准,拆卸和拧紧云台螺钉,然后再重新安装)
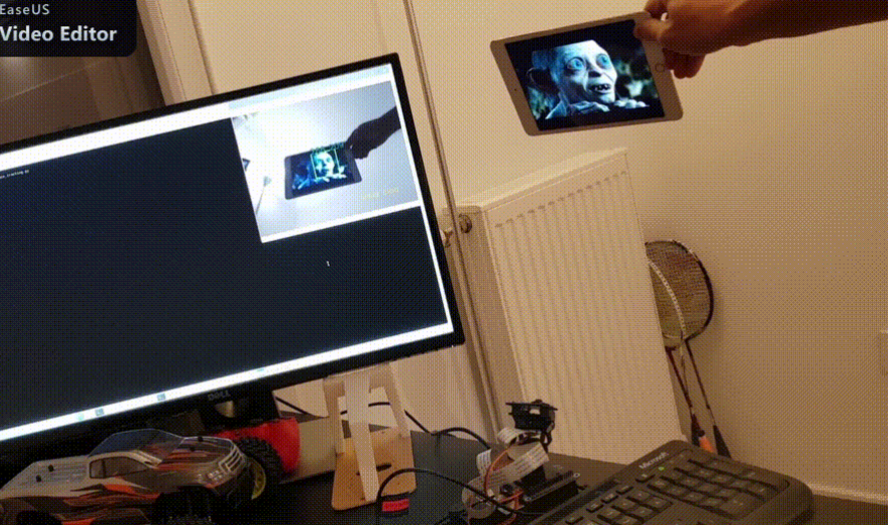
>使用默认情况下随OpenCV一起提供的预安装CascadeClassifier来使操作变得简单。我们的工作重点是如何控制平移和倾斜角度。
CascadeClassifier具有在OpenCV目录+ /data/haarcascade_frontalface_default.xml中找到的正面人脸识别的预训练
所述CascadeClassifier给我们直接一组用于帧中的每个检测到的面部信息(X,Y,W,H)。(x,y)是检测到的面部的左上角的位置,(w,h)是检测到的面部的高度和与之的距离,根据这些信息,我们可以计算出检测到的面部的中心。
>脸部中心
当我们得到(x,y)时,将控制我们的摇摄和俯仰伺服器将摄像机移动到面部中心应靠近镜框中心的位置
>伪PD控制器
为什么是伪PD?因为我们的伺服器没有位置传感器,所以我们不知道机器人摄像头的摇摄角度和倾斜角度。因此,我们不能严格使用反馈控制。我使用了一个伪PD控制器,该控制器仅使用delta_PAN来递增/递减相机的pan-angle(resp。til-angle):
delta_PAN = k_PAN * delta_x + kd_PAN * delta_x_dot
大致来说,它是一种前馈控制器。
如果您在我们没有有关伺服器位置的信息时找到了一种更好的控制方式,请给我发送电子邮件告知我。
>拓展
我尝试添加一些随机消息模块:
bonjour:相机第一次检测到脸部时的随机欢迎消息
cachecache:当我们在相机前停留太长时间时,随机显示“远离我”消息
缺少:什么都没检测到的随机消息
但是,添加这些消息有时会使算法产生一定的滞后。因此,大家可以消除这些模块以使相机更快。
>多脸检测
CascadeClassifier可以在一帧中找到多张脸,但是我将PD控制器限制为仅检测到一张脸1张脸的情况。轮到您改善此问题了。一种想法是计算检测到的面部的质心。

代码链接:https : //github.com/nguyenrobot/palt-tilt-cam
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~