
go 的运行时
goroutine 定义
“Goroutine 是一个与其他 goroutines 并行运行在同一地址空间的 Go 函数或方法。一个运行的程序由一个或更多个 goroutine 组成。它与线程、协程、进程等不同。它是一个 goroutine” —— Rob PikeGoroutines 在同一个用户地址空间里并行独立执行 functions , channels 则用于 goroutines 间的通信和同步访问控制。
goroutine VS thread
- 内存占用. 创建一个
goroutine的栈内存消耗为2 KB(Linux AMD64Go v1.4后),运行过程中,如果栈空间不够用,会自动进行扩容。创建一个thread为了尽量避免极端情况下操作系统线程栈的溢出,默认会为其分配一个较大的栈内存(1 - 8 MB栈内存,线程标准POSIX Thread),而且还需要一个被称为“guard page”的区域用于和其他thread的栈空间进行隔离。而栈内存空间一旦创建和初始化完成之后其大小就不能再有变化,这决定了在某些特殊场景下系统线程栈还是有溢出的风险。 - 创建/销毁,线程创建和销毀都会有巨大的消耗,是内核级的交互(
trap)。POSIX线程(定义了创建和操纵线程的一套API) 通常是在已有的进程模型中增加的逻辑扩展,所以线程控制和进程控制很相似。而进入内核调度所消耗的性能代价比较高,开销较大。goroutine是用户态线程,是由go runtime管理,创建和销毁的消耗非常小。 - 调度切换 抛开陷入内核,线程切换会消耗
1000-1500纳秒(上下文保存成本高,较多寄存器,公平性,复杂时间计算统计),一个纳秒平均可以执行12-18条指令。所以由于线程切换,执行指令的条数会减少12000-18000。goroutine的切换约为200ns(用户态、3个寄存器),相当于2400-3600条指令。因此,goroutines切换成本比threads要小得多。 - 复杂性 线程的创建和退出复杂,多个
thread间通讯复杂(share memory)。不能大量创建线程(参考早期的httpd),成本高,使用网络多路复用,存在大量callback(参考twemproxy、nginx的代码) 。对于应用服务线程门槛高,例如需要做第三方库隔离,需要考虑引入线程池等。
Goroutine 运行原理
Go 程序的执行由两层组成:Go Program,Runtime,即用户程序和运行时。它们之间通过函数调用来实现内存管理、channel 通信、goroutines 创建等功能。用户程序进行的系统调用都会被 Runtime 拦截,以此来帮助它进行调度以及垃圾回收相关的工作。
M:N 模型
Go runtime 会负责 goroutine 的生老病死,从创建到销毁,都一手包办。Runtime 会在程序启动的时候。Go 创建 M 个线程(CPU 执行调度的单元,内核的 task_struct),之后创建的 N 个 goroutine 都会依附在这 M 个线程上执行,即 M:N 模型。它们能够同时运行,与线程类似,但相比之下非常轻量。因此,程序运行时,Goroutines的个数应该是远大于线程的个数的(phread 是内核线程?)。
同一个时刻,一个线程只能跑一个 goroutine。当 goroutine 发生阻塞 (chan阻塞、mutex、syscall 等等) 时,Go 会把当前的 goroutine 调度走,让其他 goroutine 来继续执行,而不是让线程阻塞休眠,尽可能多的分发任务出去,让 CPU 忙。
GM 调度模型
go 在1.2版本之前,调度模型使用的是 GM 调度模型。
G
goroutine 的缩写,每次 go func() 都代表一个 G,无限制。使用 struct runtime.g,包含了当前 goroutine 的状态、堆栈、上下文。
M
工作线程(OS thread)也被称为 Machine,使用 struct runtime.m,所有 M 是有线程栈的。如果不对该线程栈提供内存的话,系统会给该线程栈提供内存(不同操作系统提供的线程栈大小不同)
。当指定了线程栈,则 M.stack→G.stack,M 的 PC 寄存器指向 G 提供的函数,然后去执行。
GM 调度
Go 1.2前的调度器实现,限制了 Go 并发程序的伸缩性,尤其是对那些有高吞吐或并行计算需求的服务程序。每个 goroutine 对应于 runtime 中的一个抽象结构:G,而 thread 作为“物理 CPU”的存在而被抽象为一个结构:M(machine)。当 goroutine 调用了一个阻塞的系统调用,运行这个 goroutine 的线程就会被阻塞,这时至少应该再创建/唤醒一个线程来运行别的没有阻塞的 goroutine 。线程这里可以创建不止一个,可以按需不断地创建,而活跃的线程(处于非阻塞状态的线程)的最大个数存储在变量 GOMAXPROCS 中。
调用过程如下所示:
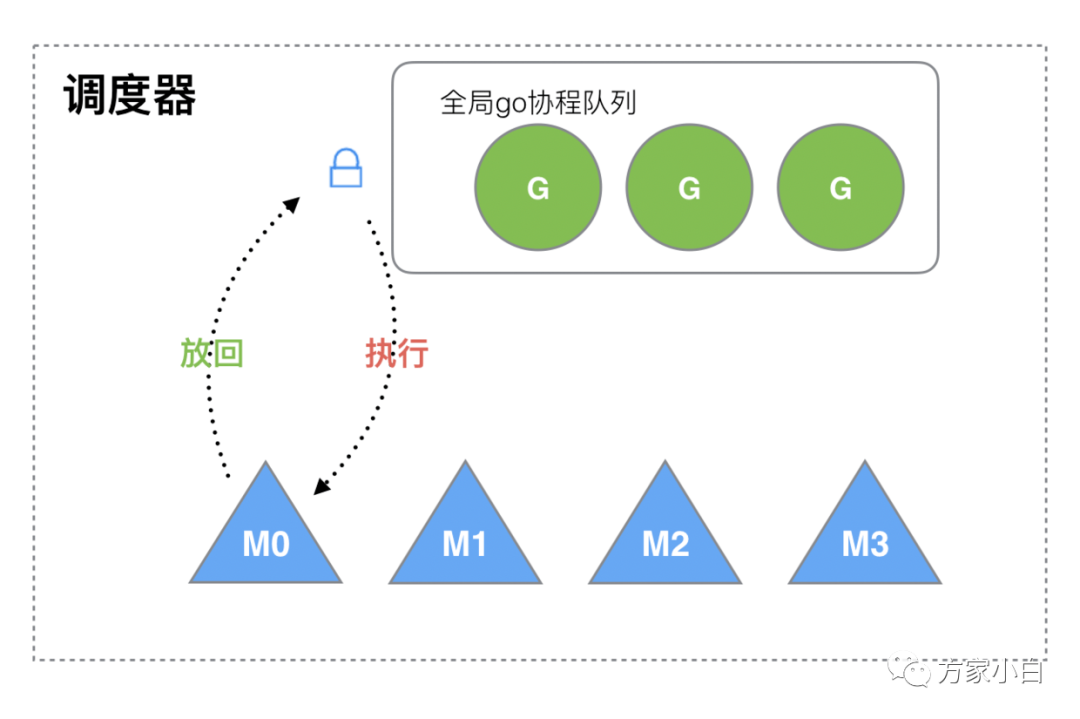
M 想要执行、放回 G 都必须访问全局 G 队列,并且 M 有多个,即多线程访问同一资源需要加锁进行保证互斥 / 同步,所以全局 G 队列是有互斥锁进行保护的
GM 调度模型的问题
- 单一全局互斥锁(
Sched.Lock)和集中状态存储 导致所有goroutine相关操作,比如:创建、结束、重新调度等都要上锁。 Goroutine传递问题M经常在M之间传递”可运行”的goroutine,这导致调度延迟增大以及额外的性能损耗(刚创建的G放到了全局队列,而不是本地 M 执行,不必要的开销和延迟)。Per-M持有内存缓存 (M.mcache) 每个M持有mcache和stackalloc,然而只有在M运行Go代码时才需要使用的内存(每个mcache可以高达2mb),当M在处于syscall时并不需要。运行Go代码和阻塞在syscall的M的比例高达1:100,造成了很大的浪费。同时内存亲缘性也较差,G当前在M运行后对 M 的内存进行了预热,因为现在G调度到同一个M的概率不高,数据局部性不好。- 严重的线程阻塞/解锁
在系统调用的情况下,工作线程经常被阻塞和取消阻塞,这增加了很多开销。比如
M找不到G,此时M就会进入频繁阻塞/唤醒来进行检查的逻辑,以便及时发现新的G来执行。by Dmitry Vyukov “Scalable Go Scheduler Design Doc”
GMP 调度模型
在 go 1.2 版本及以后,go 引入 GMP 调度模型
G
goroutine 的缩写,每次 go func() 都代表一个 G,无限制。使用 struct runtime.g,包含了当前 goroutine 的状态、堆栈、上下文。
M
工作线程(OS thread)也被称为 Machine,使用 struct runtime.m,所有 M 是有线程栈的。如果不对该线程栈提供内存的话,系统会给该线程栈提供内存(不同操作系统提供的线程栈大小不同)
。当指定了线程栈,则 M.stack→G.stack,M 的 PC 寄存器指向 G 提供的函数,然后去执行。
P
“Processor”是一个抽象的概念,并不是真正的物理 CPU。
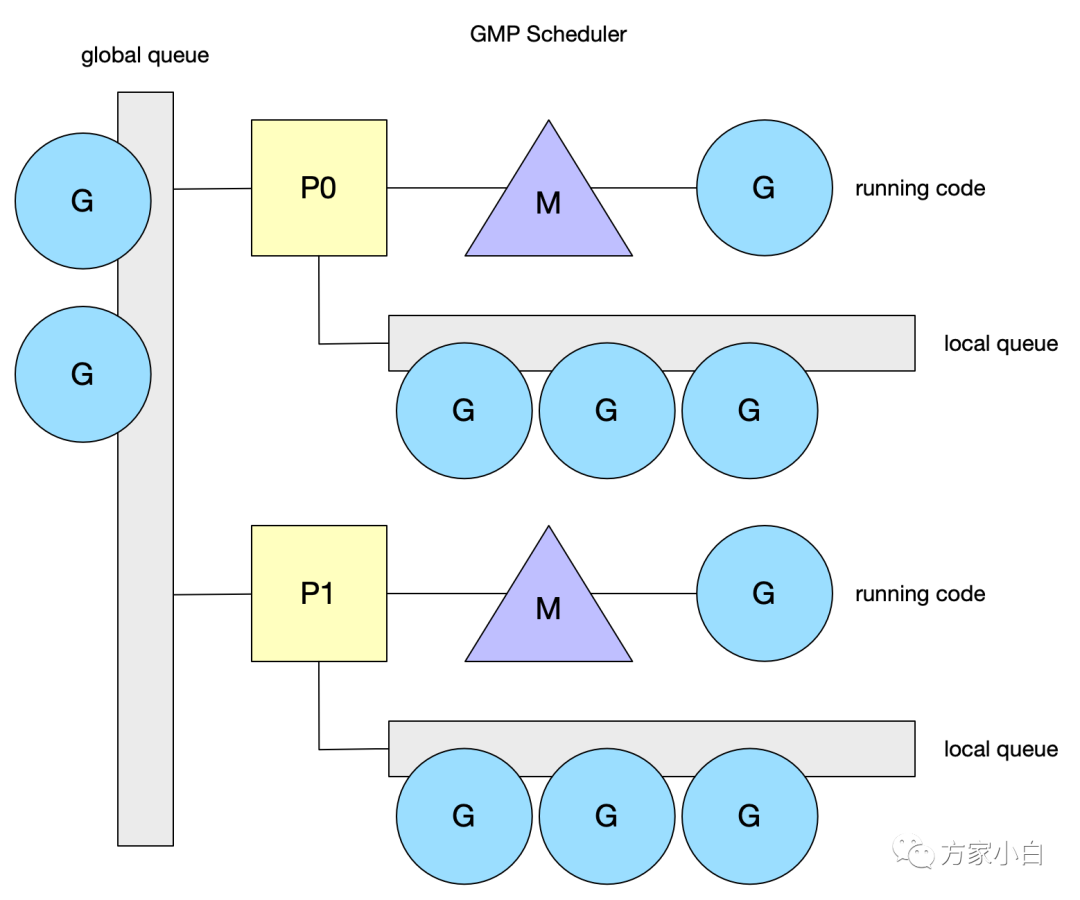
Dmitry Vyukov 的方案是引入一个结构 P,它代表了 M 所需的上下文环境,也是处理用户级代码逻辑的处理器。它负责衔接 M 和 G 的调度上下文,将等待执行的 G 与 M 对接。当 P 有任务时需要创建或者唤醒一个 M 来执行它队列里的任务。所以 P/M 需要进行绑定,构成一个执行单元。P 决定了并行任务的数量,可通过 runtime.GOMAXPROCS 来设定。在 Go1.5 之后 GOMAXPROCS 被默认设置可用的核数,而之前则默认为1。
Runtime 起始时会启动一些 G:垃圾回收的 G,执行调度的 G,运行用户代码的 G;并且会创建一个 M 用来开始 G 的运行。随着时间的推移,更多的 G 会被创建出来,更多的 M 也会被创建出来。
Tips: https://github.com/uber-go/automaxprocsAutomatically set GOMAXPROCS to match Linux container CPU quota.mcache/stackalloc 从 M 移到了 P,而 G 队列也被分成两类,保留全局 G 队列,同时每个 P 中都会有一个本地的 G 队列。
GMP 调度
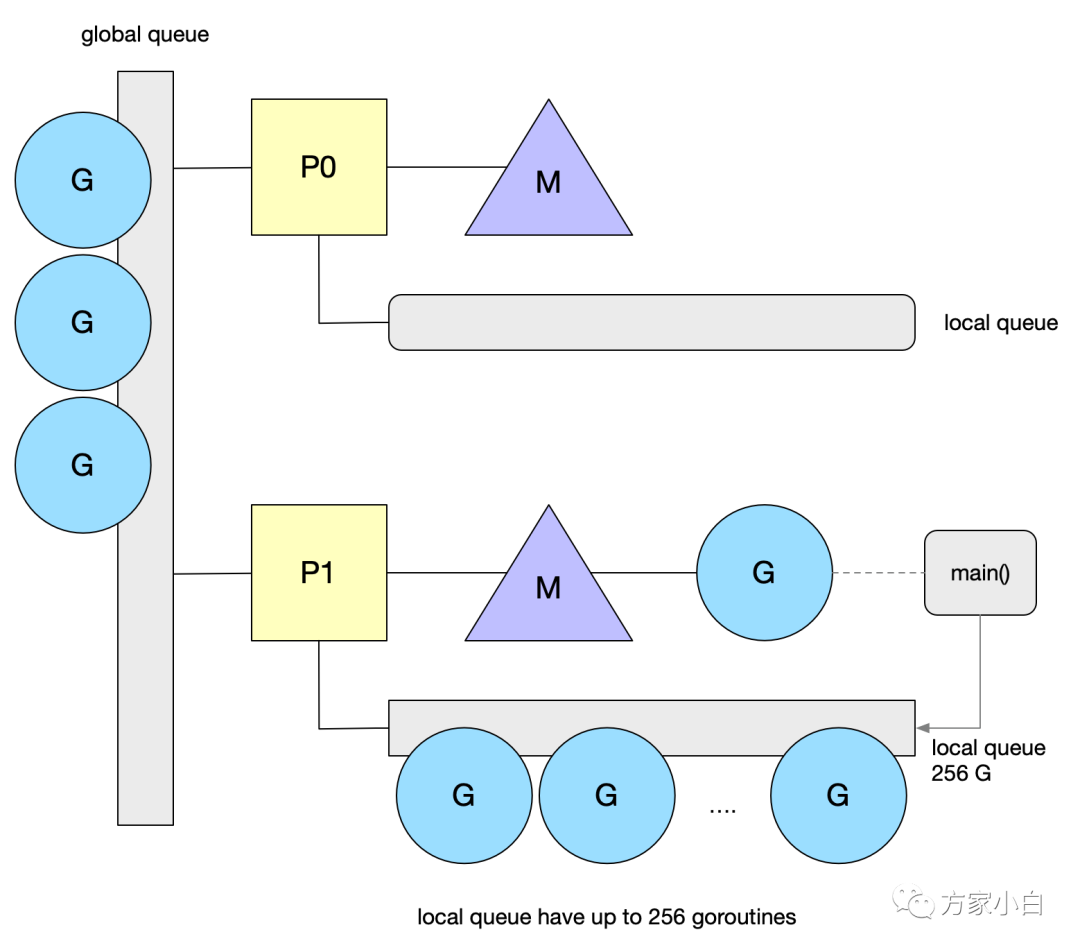
GMP调度模型, 引入了 local queue,因为 P 的存在,runtime 并不需要做一个集中式的 goroutine 调度,每一个 M 都会在 P's local queue、global queue 或者其他 P 队列中找 G 执行,减少全局锁对性能的影响。这也是 GMP Work-stealing 调度算法的核心。注意 P 的本地 G 队列还是可能面临一个并发访问的场景,为了避免加锁,这里 P 的本地队列是一个 LockFree的队列,窃取 G 时使用 CAS 原子操作来完成。关于LockFree 和 CAS 的知识参见 Lock-Free。
Work Stealing
当一个 P 执行完本地所有的 G 之后,并且全局队列为空的时候,会尝试挑选一个受害者 P ,从它的 G 队列中窃取一半的 G。否则会从全局队列中获取(当前个数/GOMAXPROCS)个 G 。为了保证公平性,从随机位置上的 P 开始,而且遍历的顺序也随机化了(选择一个小于 GOMAXPROCS ,且和它互为质数的步长),保证遍历的顺序也随机化了。
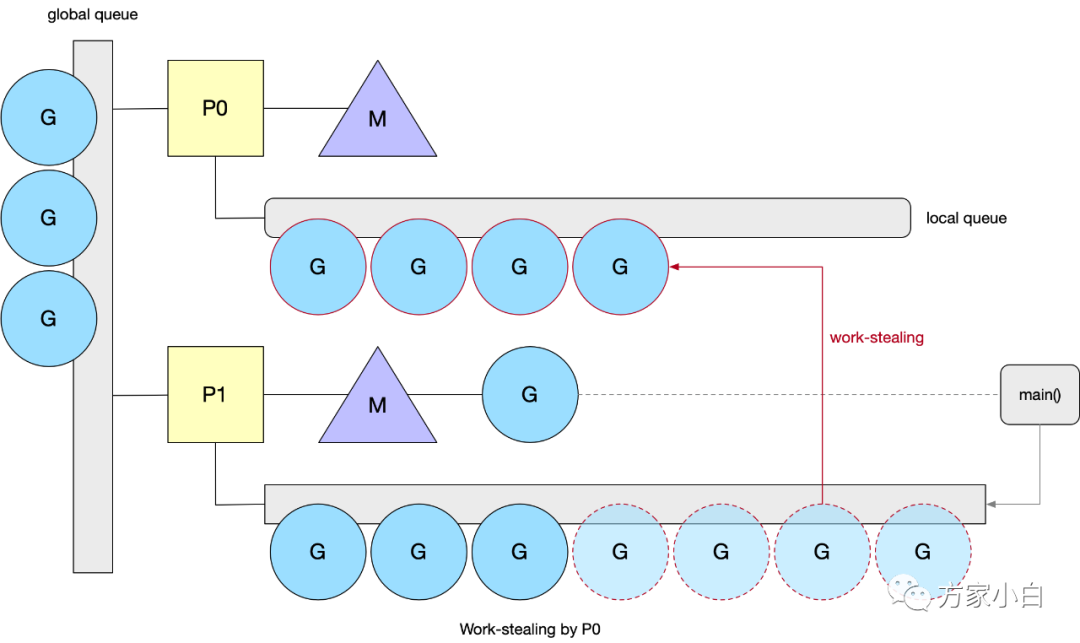
光窃取失败时获取是不够的,可能会导致全局队列饥饿。P 的调度算法中还会每个 N 轮调度之后就去全局队列拿一个 G。如下图。
谁放入的全局队列呢
有两种情况会把G放到全局队列中。
- 新建
G时P的本地G队列放不下已满并达到256个的时候会放半数G到全局队列去。 - 阻塞的系统调用返回时找不到空闲
P也会放到全局队列。
SysCall 系统调用
当 G 调用 syscall 后会解绑 P,然后 M 和 G 进入阻塞,而 P 此时的状态就是 syscall,表明这个 P 的 G 正在 syscall 中,这时的 P 是不能被调度给别的 M 的。如果在短时间内阻塞的 M 就唤醒了,那么 M 会优先来重新获取这个 P,能获取到就继续绑回去,这样有利于数据的局部性。系统监视器 (system monitor),称为 sysmon,会定时扫描。在执行 syscall 时, 如果某个 P 的 G 执行超过一个 sysmon tick(10ms),就会把他设为 idle,重新调度给需要的 M,强制解绑。
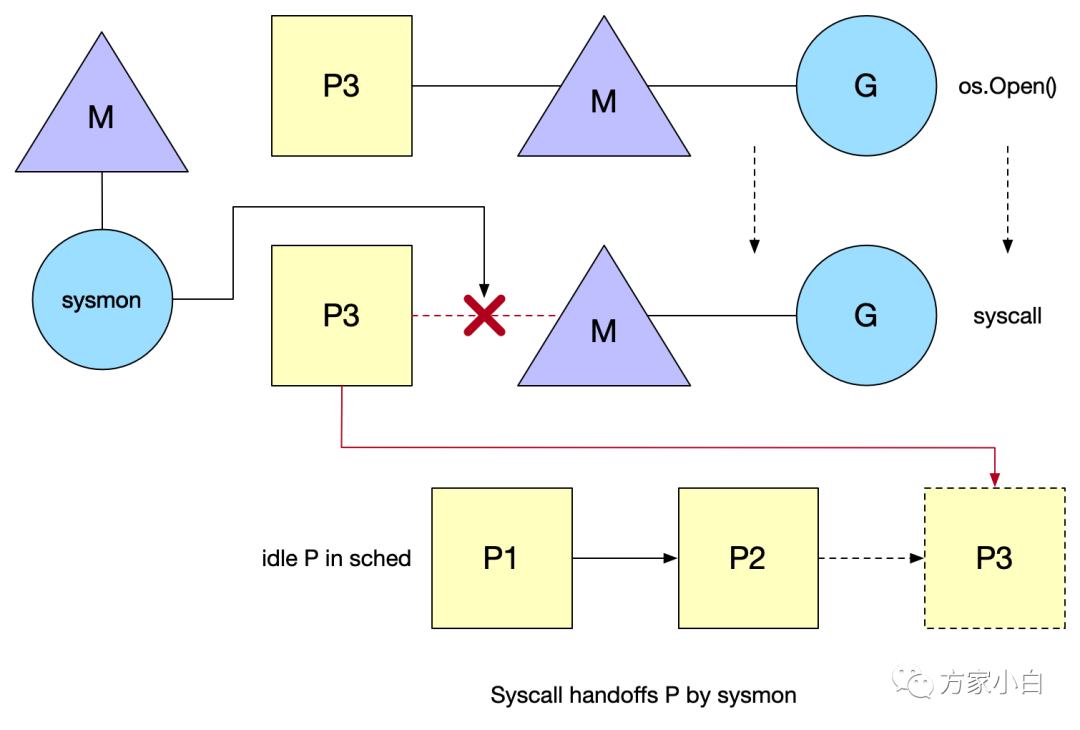
P3 和 M 脱离后目前在 idle list 中等待被绑定(处于 syscall 状态)。而 syscall 结束后 M 按照如下规则执行直到满足其中一个条件:
- 尝试获取同一个
P(P3),恢复执行G - 尝试获取
idle list中的其他空闲P,恢复执行G - 找不到空闲
P,把G放回global queue,M放回到idle list
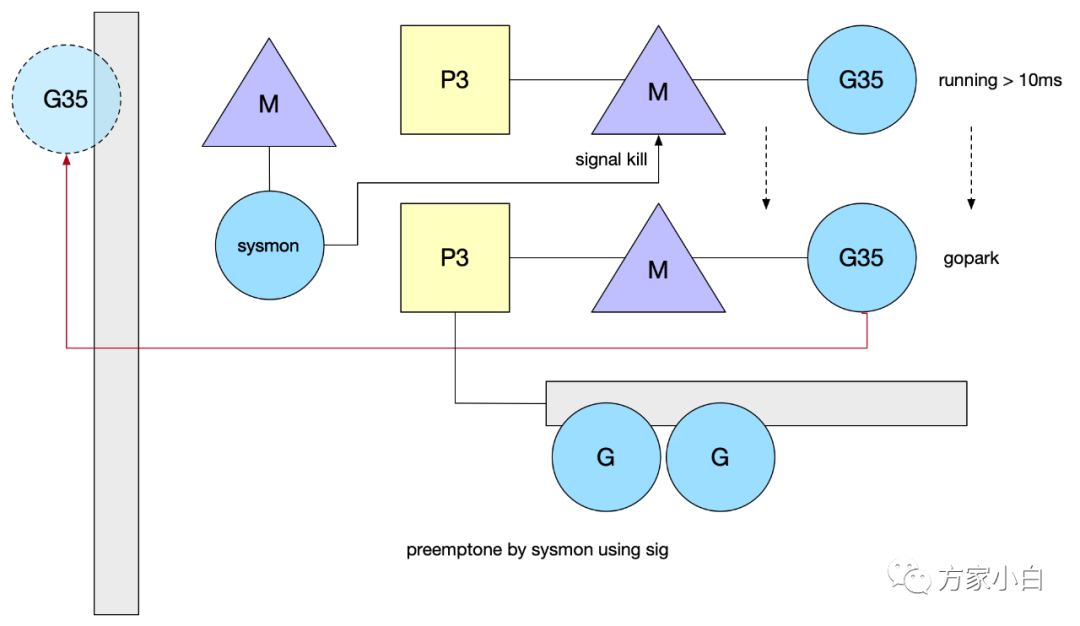
再举一个例子:如下图.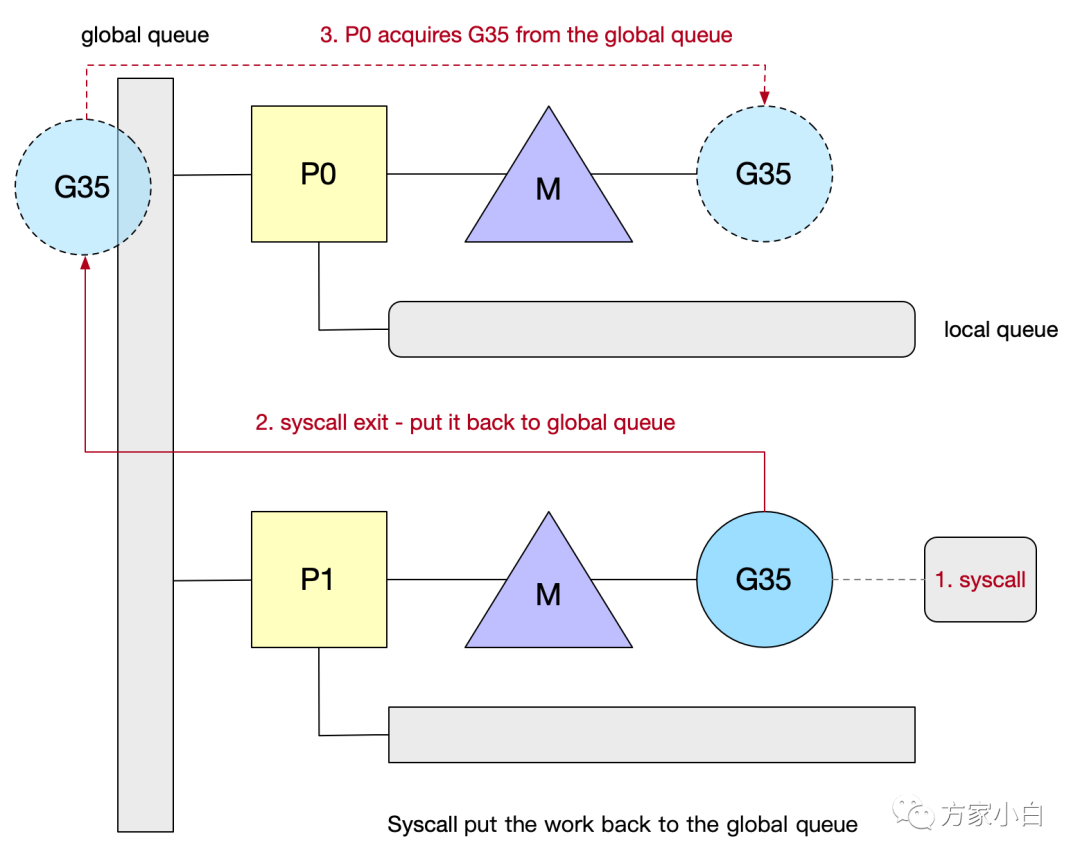
- 第一步:
G35发生了系统调用,长时间没有返回。P1和M解绑。(p1不会马上被推送到idle list, 而是经过一段时间才会推送到idle list.) - 第二步:
G35系统调用完成,将G35推向了全局队列. - 第三步:
G35被其他的P捞到了(可能P0经过1/61轮次正好check全局队列), 这样G35就可以继续执行了。
需要注意的是:当使用了 Syscall,Go 无法限制 Blocked OS threads 的数量:The GOMAXPROCS variable limits the number of operating system threads that can execute user-level Go code simultaneously. There is no limit to the number of threads that can be blocked in system calls on behalf of Go code; those do not count against the GOMAXPROCS limit. This package’s GOMAXPROCS function queries and changes the limit.
Tips: 使用 syscall 写程序要认真考虑 pthread exhaust 问题。
Spining Thread.
线程自旋是相对于线程阻塞而言的,表象就是循环执行一个指定逻辑(调度逻辑,目的是不停地寻找 G)。这样做的问题显而易见,如果 G 迟迟不来,CPU 会白白浪费在这无意义的计算上。但好处也很明显,降低了 M 的上下文切换成本,提高了性能。在两个地方引入自旋:
- 类型1:
M不带P的找P挂载(一有P释放就结合) - 类型2:
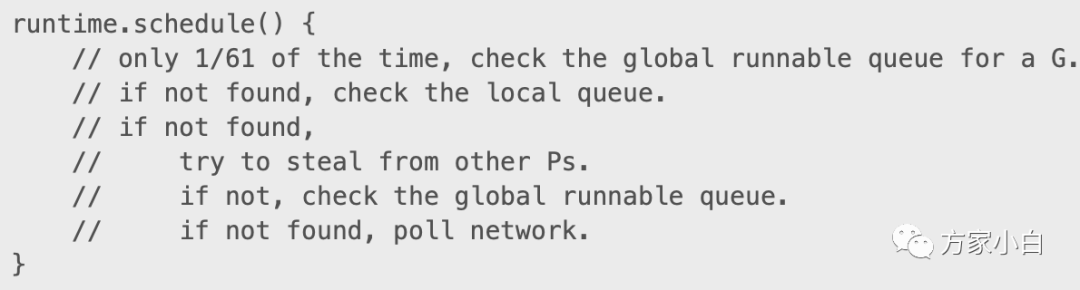
M带P的找G运行(一有runable的G就执行)。这种情况下会首先 按照1/61轮次的查询global Queue, 然后再查看local Queue是否有G. 如果没有,则去查看Global Queue, 如果没有再去检查net poller, 看看是否有可用的goroutine. 为了避免过多浪费CPU资源,自旋的M最多只允许GOMAXPROCS(Busy P)。同时当有类型1的自旋M存在时,类型2的自旋M就不阻塞,阻塞会释放P,一释放P就马上被类型1的自旋M抢走了,没必要。
在新 G 被创建、M 进入系统调用、M 从空闲被激活这三种状态变化前,调度器会确保至少有一个自旋 M 存在(唤醒或者创建一个 M),除非没有空闲的 P。
为什么呢?
- 当新
G创建,如果有可用P,就意味着新G可以被立即执行,即便不在同一个P也无妨,所以我们保留一个自旋的 M(这时应该不存在类型1的自旋只有类型2的自旋)就可以保证新 G 很快被运行。 - 当
M进入系统调用,意味着M不知道何时可以醒来,那么M对应的P中剩下的G就得有新的M来执行,所以我们保留一个自旋的M来执行剩下的G(这时应该不存在类型2的自旋只有类型1的自旋)。 - 如果
M从空闲变成活跃,意味着可能一个处于自旋状态的M进入工作状态了,这时要检查并确保还有一个自旋M存在,以防还有G或者还有P空着的。
GMP 模型问题总结
- 单一全局互斥锁(
Sched.Lock)和集中状态存储G被分成全局队列和P的本地队列,全局队列依旧是全局锁,但是使用场景明显很少,P本地队列使用无锁队列,使用原子操作来面对可能的并发场景。 Goroutine传递问题G创建时就在P的本地队列,可以避免在G之间传递(窃取除外),G对P的数据局部性好; 当G开始执行了,系统调用返回后M会尝试获取可用P,获取到了的话可以避免在M之间传递。而且优先获取调用阻塞前的P,所以G对M数据局部性好,G对P的数据局部性也好。Per-M持有内存缓存 (M.mcache) 内存mcache只存在P结构中,P最多只有GOMAXPROCS个,远小于M的个数,所以内存没有过多的消耗。- 严重的线程阻塞/解锁
通过引入自旋,保证任何时候都有处于等待状态的自旋 M,避免在等待可用的
P和G时频繁的阻塞和唤醒。
syscon
sysmon 也叫监控线程,它无需 P 也可以运行,他是一个死循环,每20us~10ms循环一次,循环完一次就 sleep 一会,为什么会是一个变动的周期呢,主要是避免空转,如果每次循环都没什么需要做的事,那么 sleep 的时间就会加大。
- 释放闲置超过
5分钟的span物理内存; - 如果超过2分钟没有垃圾回收,强制执行;
- 将长时间未处理的
netpoll添加到全局队列; - 向长时间运行的
G任务发出抢占调度; - 收回因
syscall长时间阻塞的P;
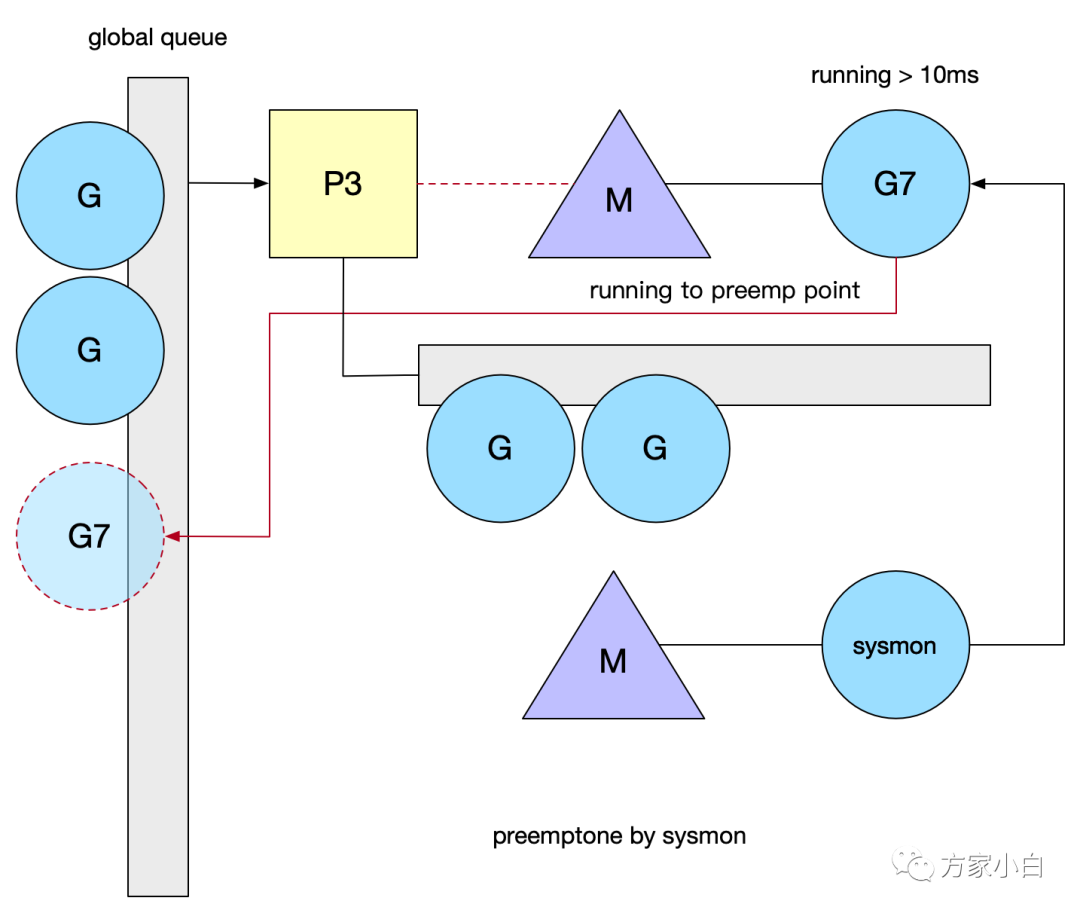
当 P 在 M 上执行时间超过10ms,sysmon 调用 preemptone 将 G 标记为 stackPreempt 。因此需要在某个地方触发检测逻辑,Go 当前是在检查栈是否溢出的地方判定(morestack()),M 会保存当前 G 的上下文,重新进入调度逻辑, 这样就不会死循环了。死循环:issues/11462信号抢占:go1.14基于信号的抢占式调度实现原理异步抢占,注册 sigurg 信号,通过 sysmon 检测,对 M 对应的线程发送信号,触发注册的 handler,它往当前 G 的 PC 中插入一条指令(调用某个方法),在处理完 handler,G 恢复后,自己把自己推到了 global queue 中。
Network poller
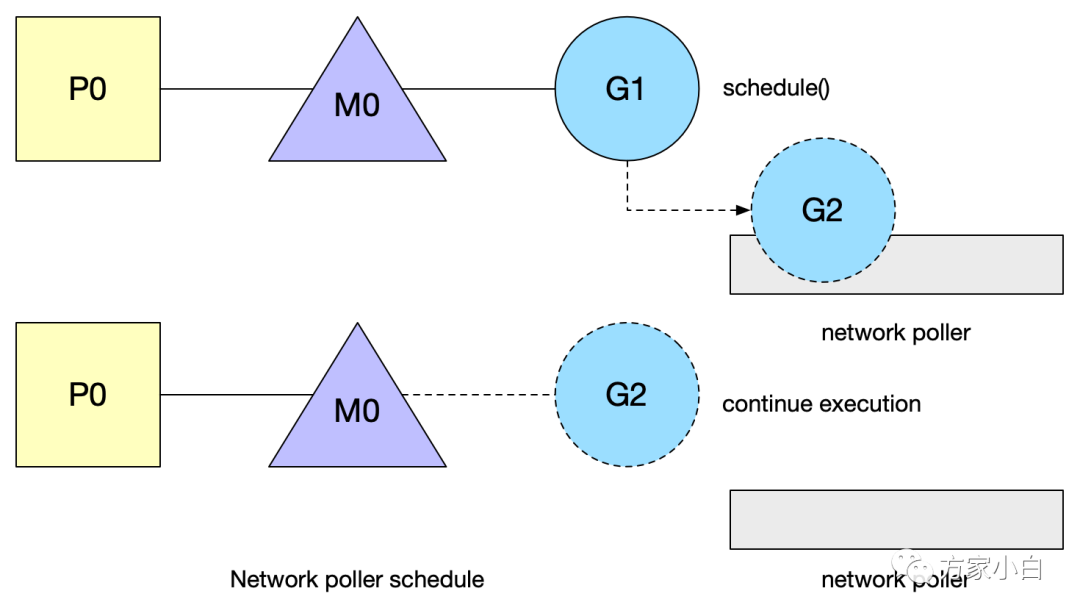
Go 所有的 I/O 都是阻塞的。然后通过 goroutine + channel 来处理并发。因此所有的 IO 逻辑都是直来直去的,你不再需要回调,不再需要 future,要的仅仅是 step by step。这对于代码的可读性是很有帮助的。G 发起网络 I/O 操作也不会导致 M 被阻塞(仅阻塞G),从而不会导致大量 M 被创建出来。将异步 I/O 转换为阻塞 I/O 的部分称为 netpoller。打开或接受连接都被设置为非阻塞模式。如果你试图对其进行 I/O 操作,并且文件描述符数据还没有准备好,G 会进入 gopark 函数,将当前正在执行的 G 状态保存起来,然后切换到新的堆栈上执行新的 G。
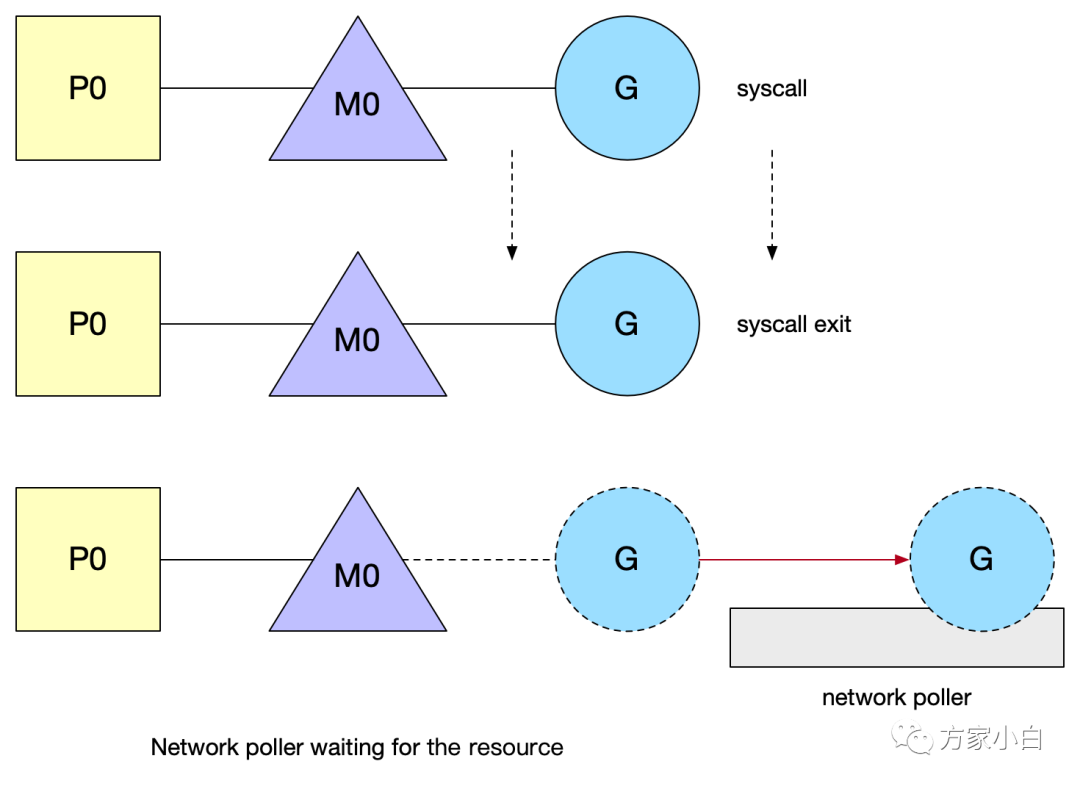
那什么时候 G 被调度回来呢?
sysmonschedule():M找G的调度函数GC:start the world调用netpoll()在某一次调度G的过程中,处于就绪状态的fd对应的G就会被调度回来。G的gopark状态:G置为waiting状态,等待显示goready唤醒,在poller中用得较多,还有锁、chan等。
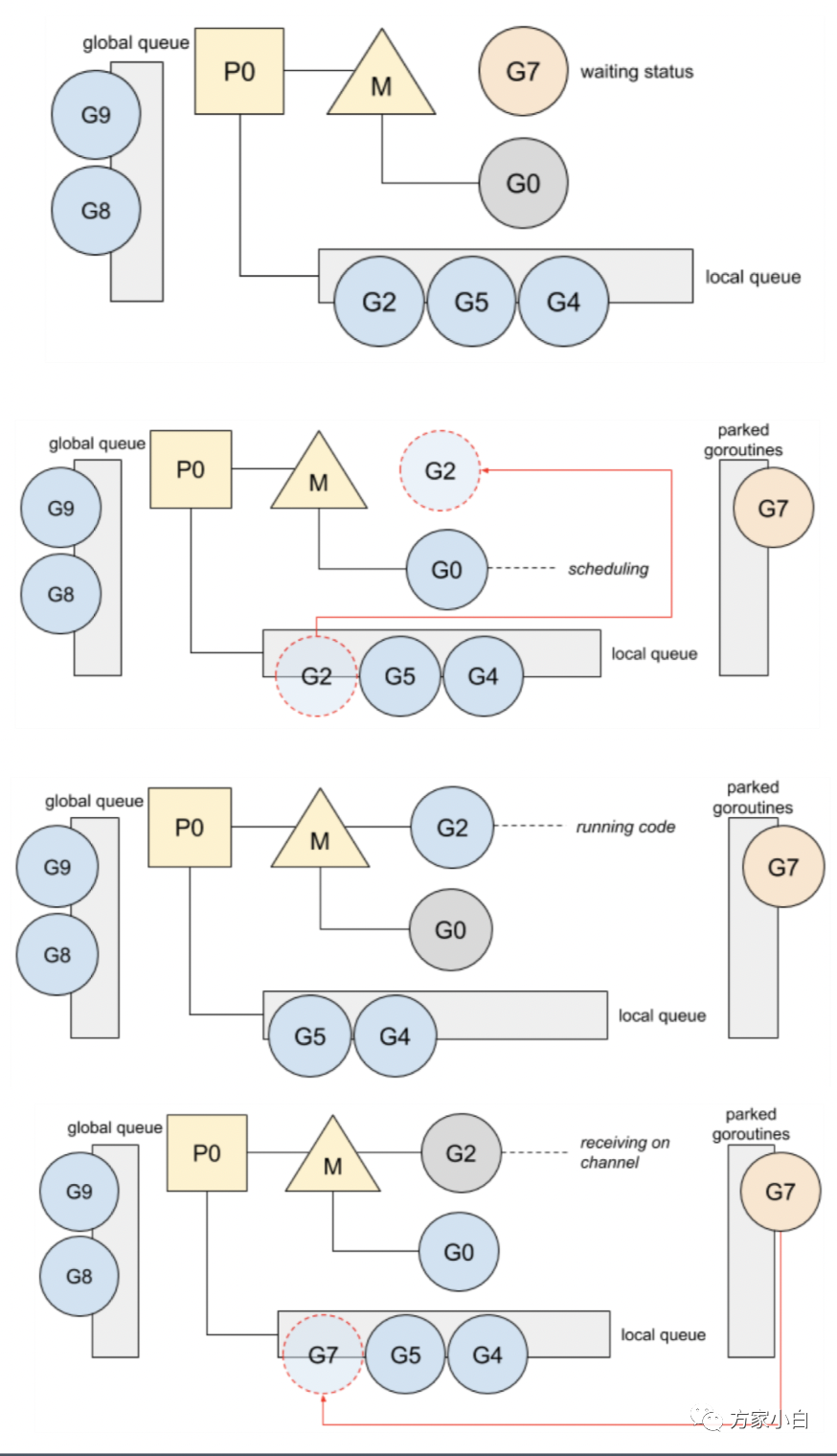
Scheduler Affinity 调度亲和性
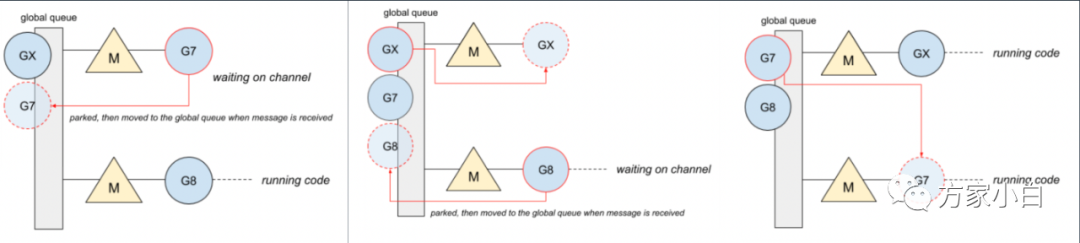
GM 调度器时代的,chan 操作导致的切换代价。
Goroutine#7正在等待消息,阻塞在chan。一旦收到消息,这个goroutine就被推到全局队列。- 然后,
chan推送消息,goroutine#X将在可用线程上运行,而goroutine#8将阻塞在chan。 goroutine#7现在在可用线程上运行。在chan来回通信的goroutine会导致频繁的blocks,即频繁地在本地队列中重新排队。然而,由于本地队列是FIFO实现,如果另一个goroutine占用线程,unblock goroutine不能保证尽快运行。同时Go亲缘性调度的一些限制:Work-stealing、系统调用。goroutine #9在chan被阻塞后恢复。但是,它必须等待#2、#5和#4之后才能运行。goroutine #5将阻塞其线程,从而延迟goroutine #9,并使其面临被另一个P窃取的风险。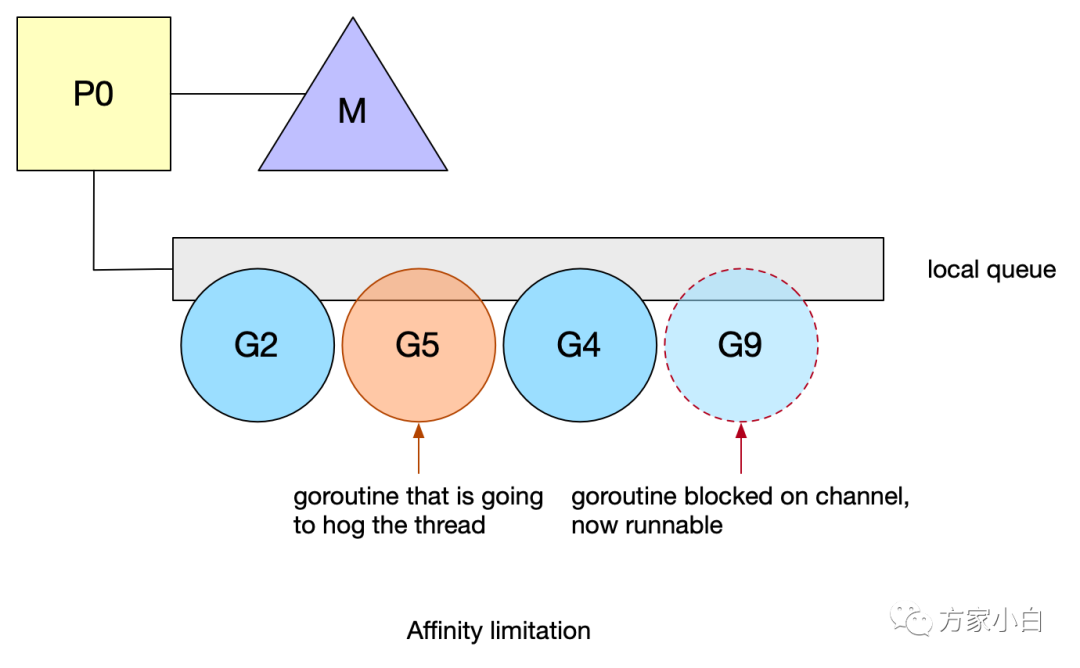
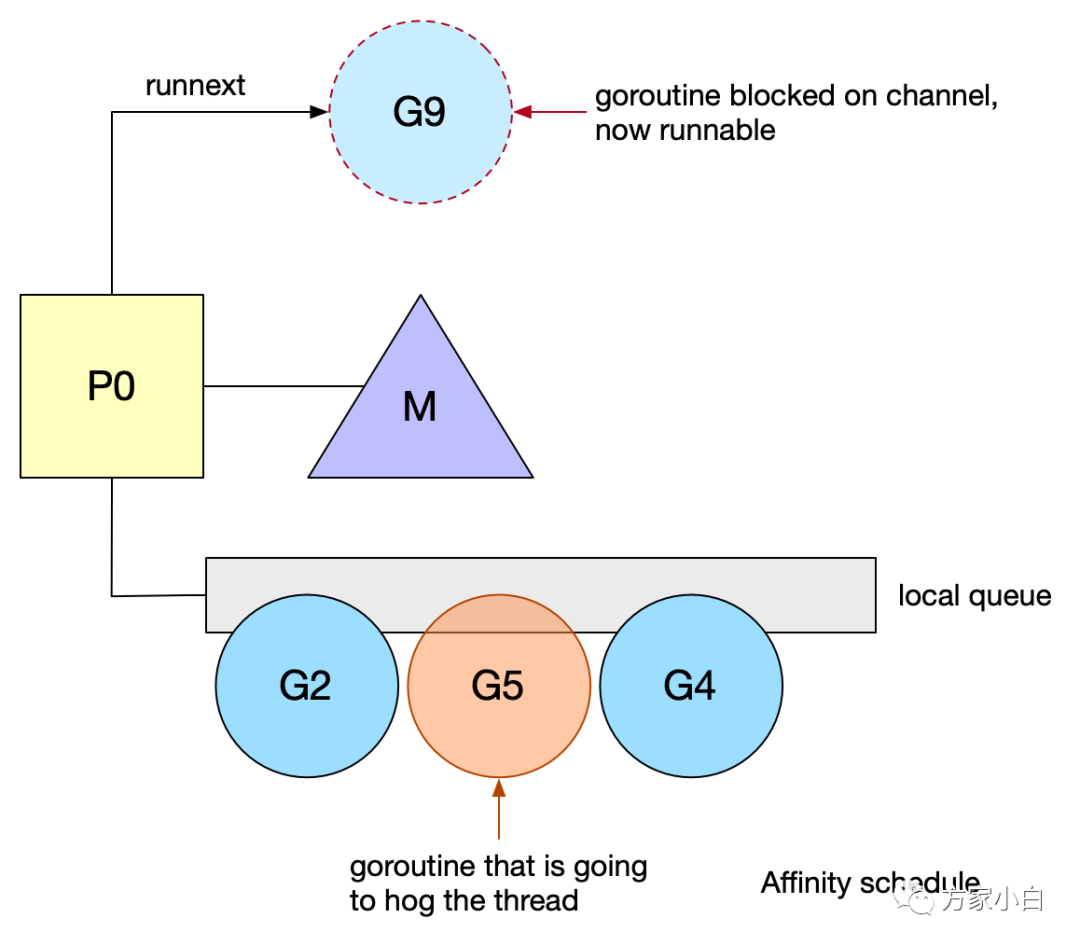
针对 communicate-and-wait 模式,进行了亲缘性调度的优化。Go 1.5 在 P 中引入了 runnext 特殊的一个字段,可以高优先级执行 unblock G。goroutine #9现在被标记为下一个可运行的。这种新的优先级排序允许 goroutine 在再次被阻塞之前快速运行。这一变化对运行中的标准库产生了总体上的积极影响,提高了一些包的性能。
Goroutine Lifecycle
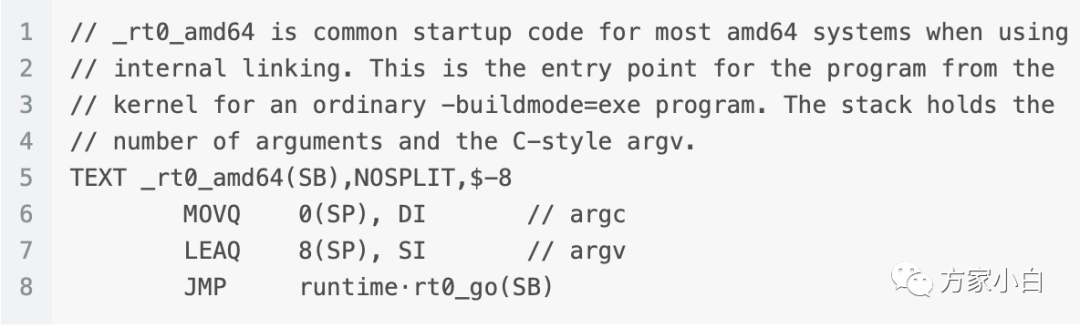
go 程序的启动
整个程序始于一段汇编,而在随后的 runtime·rt0_go(也是汇编程序)中,会执行很多初始化工作。
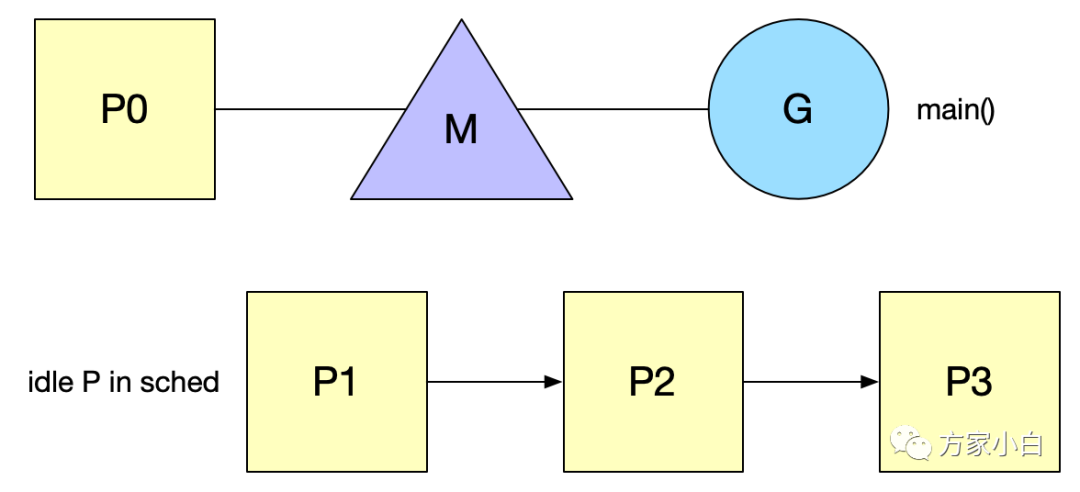
- 绑定 m0 和 g0,m0就是程序的主线程,程序启动必然会拥有一个主线程,这个就是 m0。g0 负责调度,即 shedule() 函数。
- 创建 P,绑定 m0 和 p0,首先会创建 GOMAXPROCS 个 P ,存储在 sched 的 空闲链表(pidle)。
- 新建任务 g 到 p0 本地队列,m0 的 g0 会创建一个 指向 runtime.main() 的 g ,并放到 p0 的本地队列。runtime.main(): 启动 sysmon 线程;启动 GC 协程;执行 init,即代码中的各种 init 函数;执行 main.main 函数。
Os Thread 创建
准备运行的新 goroutine 将唤醒 P 以更好地分发工作。这个 P 将创建一个与之关联的 M 绑定到一个 OS thread。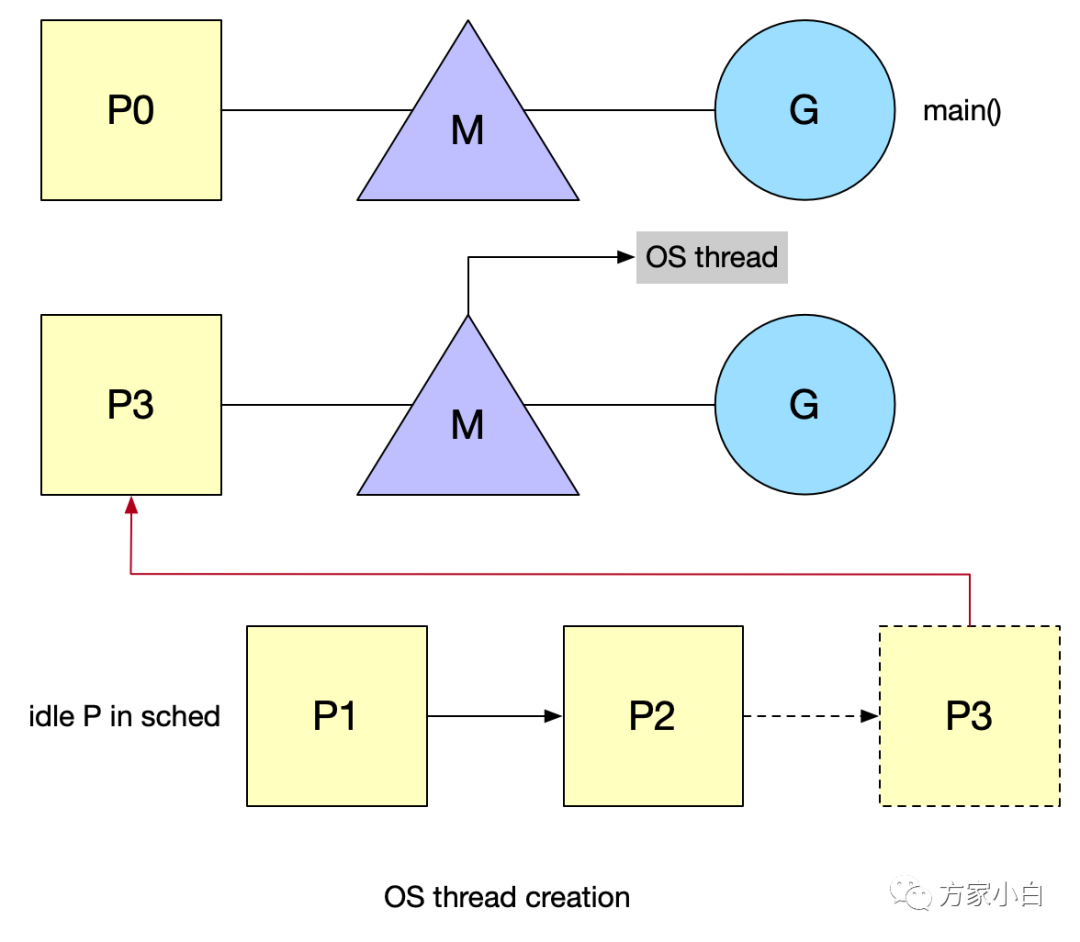
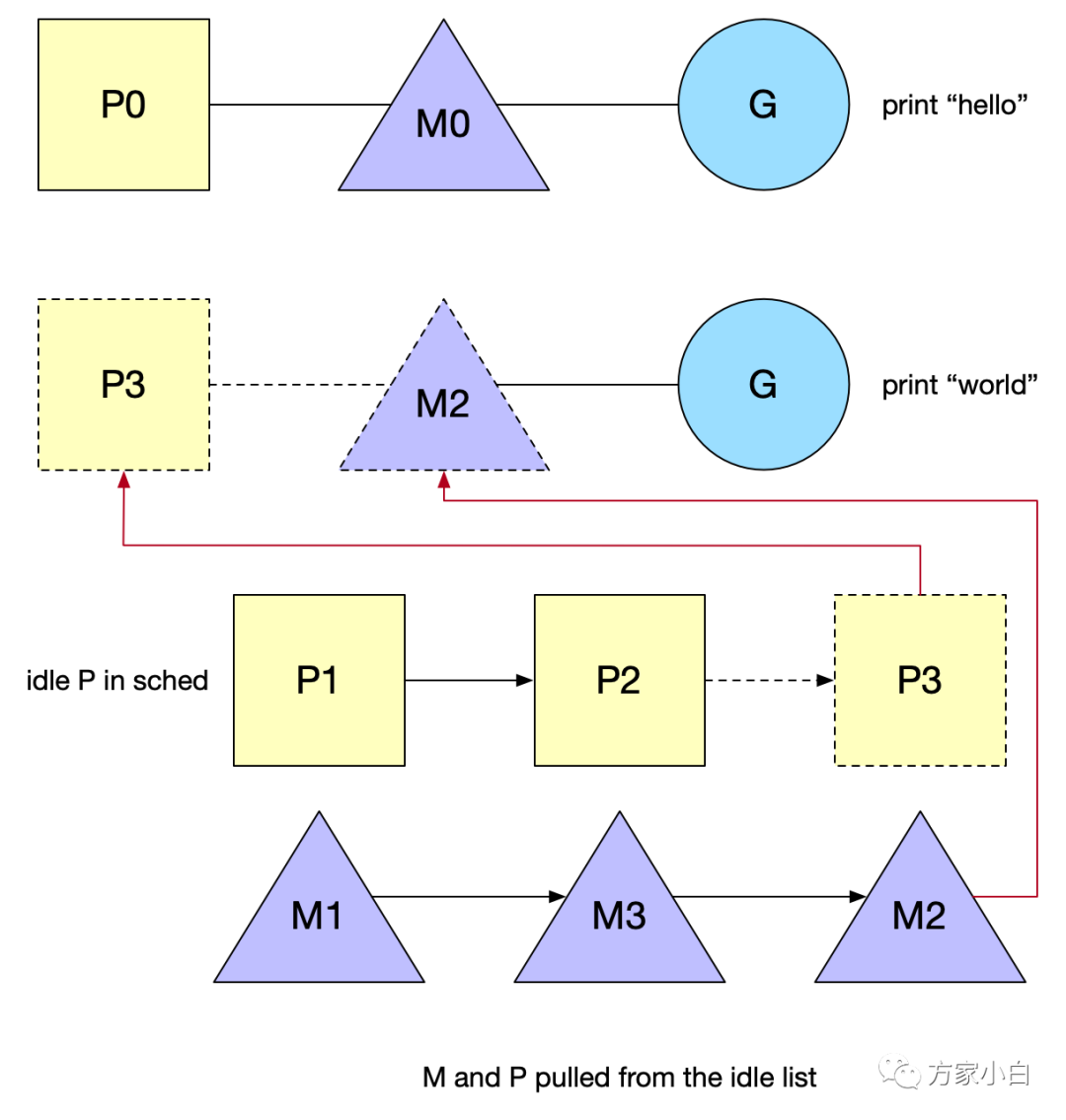
go func() 中 触发 Wakeup 唤醒机制:有空闲的 P 而没有在 spinning 状态的 M 时候, 需要去唤醒一个空闲(睡眠)的 M 或者新建一个。当线程首次创建时,会执行一个特殊的 G,即 g0,它负责管理和调度 G。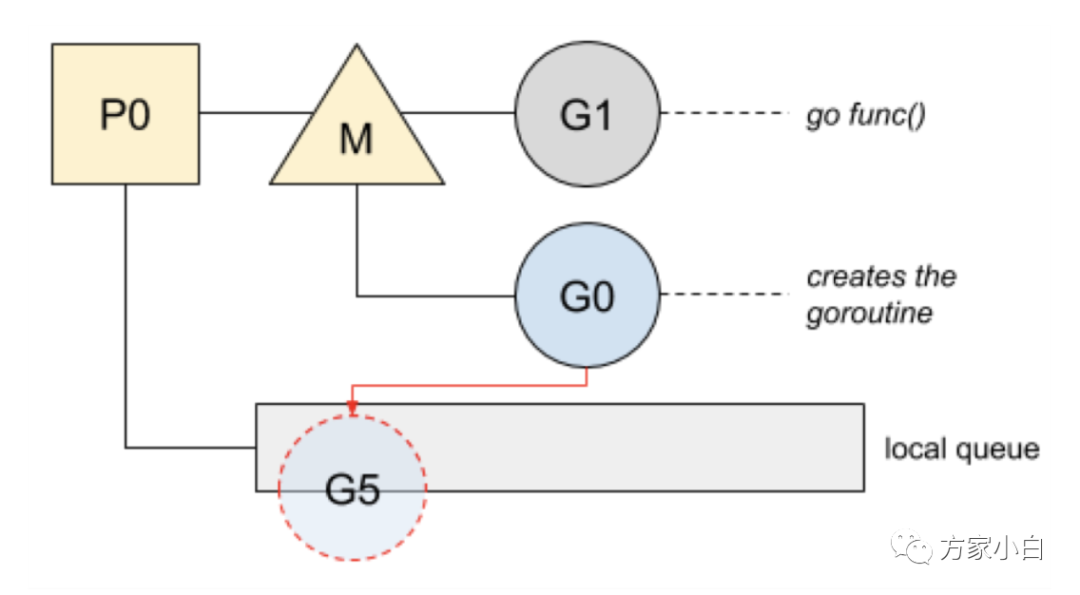
特殊的g0
Go 基于两种断点将 G 调度到线程上:
- 当
G阻塞时:系统调用、互斥锁或chan。阻塞的G进入睡眠模式/进入队列,并允许Go安排和运行等待其他的G。 - 在函数调用期间,如果
G必须扩展其堆栈。这个断点允许Go调度另一个G并避免运行G占用CPU。在这两种情况下,运行调度程序的g0将当前G替换为另一个G,即ready to run。然后,选择的G替换g0并在线程上运行。与常规G相反,g0有一个固定和更大的栈。 Defer函数的分配GC收集,比如STW、扫描G的堆栈和标记、清除操作- 栈扩容,当需要的时候,由
g0进行扩栈操作
Schedule
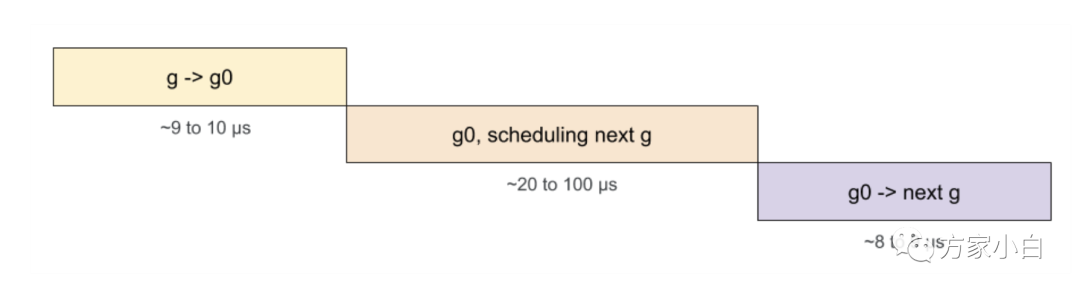
在 Go 中,G 的切换相当轻便,其中需要保存的状态仅仅涉及以下两个:
Goroutine在停止运行前执行的指令,程序当前要运行的指令是记录在程序计数器(PC)中的,G稍后将在同一指令处恢复运行;G的堆栈,以便在再次运行时还原局部变量;在切换之前,堆栈将被保存,以便在G再次运行时进行恢复:
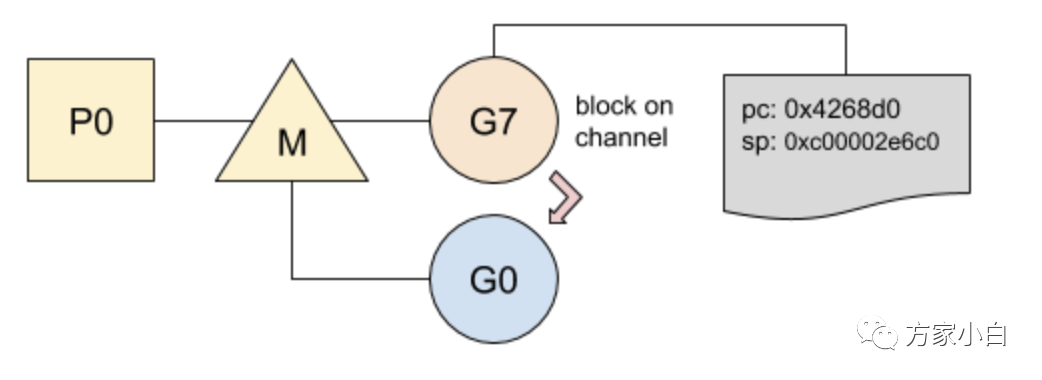
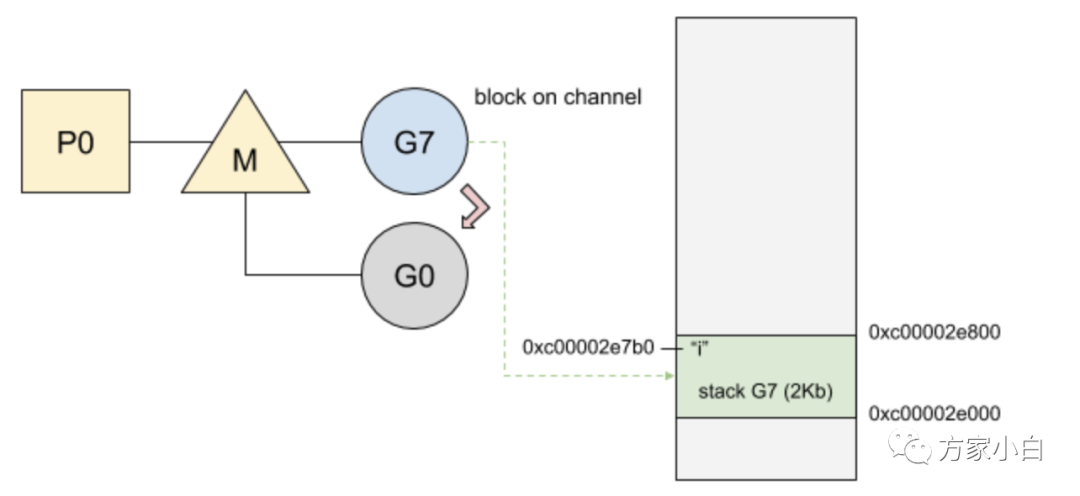
从 g 到 g0 或从 g0 到 g 的切换是相当迅速的,它们只包含少量固定的指令(9-10ns)。相反,对于调度阶段,调度程序需要检查许多资源以便确定下一个要运行的 G。当前 g 阻塞在 chan 上并切换到 g0:
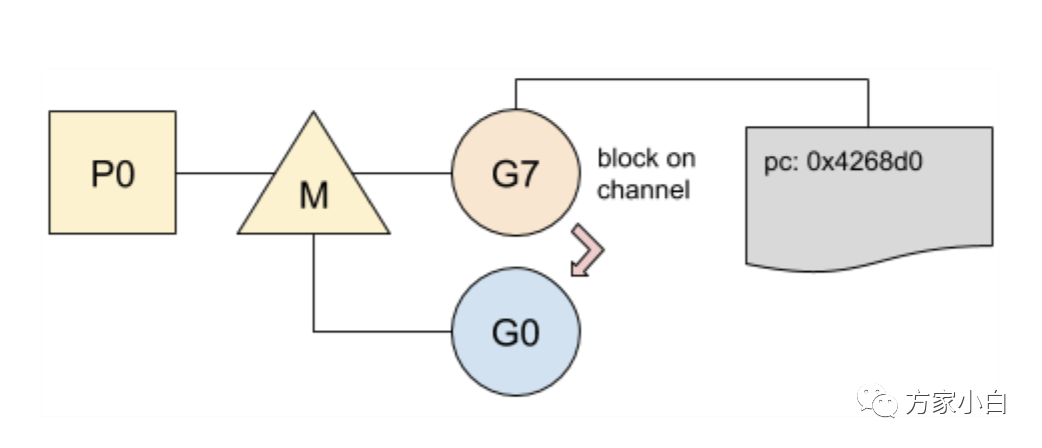
- 1、PC 和堆栈指针一起保存在内部结构中;
- 2、将 g0 设置为正在运行的 goroutine;
- 3、g0 的堆栈替换当前堆栈;
g0 寻找新的 Goroutine 来运行g0 使用所选的 Goroutine 进行切换:
- 1、
PC和堆栈指针是从其内部结构中获取的; - 2、程序跳转到对应的
PC地址;
Goroutine Recycle
goroutine重用
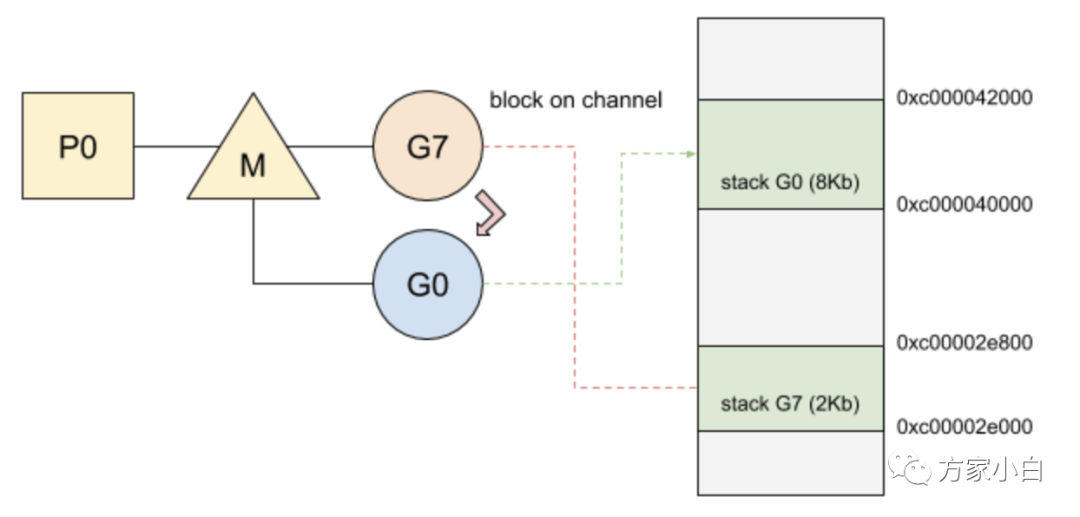
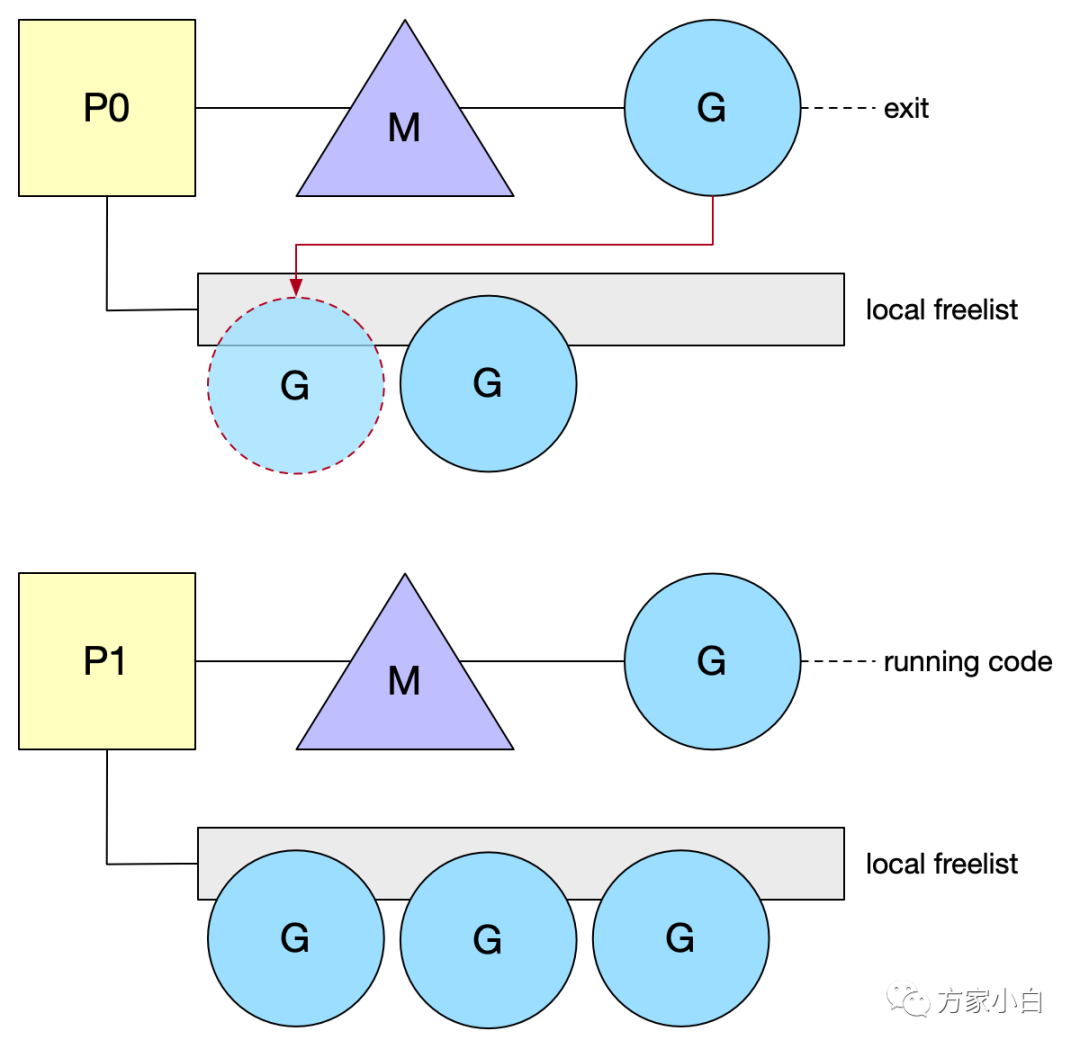
G 很容易创建,栈很小以及快速的上下文切换。基于这些原因,开发人员非常喜欢并使用它们。然而,一个产生许多 shortlive 的 G 的程序将花费相当长的时间来创建和销毁它们。每个 P 维护一个 freelist G,保持这个列表是本地的,这样做的好处是不使用任何锁来 push/get 一个空闲的 G。当 G 退出当前工作时,它将被 push 到这个空闲列表中。
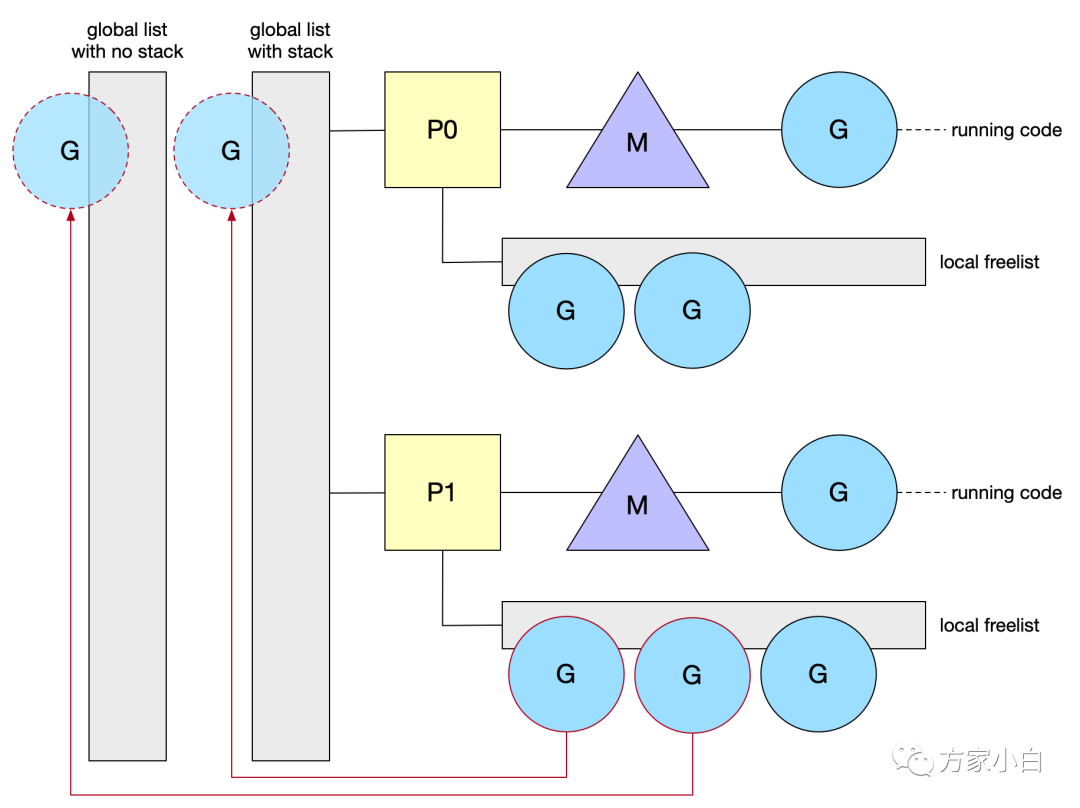
为了更好地分发空闲的 G ,调度器也有自己的列表。它实际上有两个列表:一个包含已分配栈的 G,另一个包含释放过堆栈的 G(无栈)。锁保护 central list,因为任何 M 都可以访问它。当本地列表长度超过64时,调度程序持有的列表从 P 获取 G。然后一半的 G 将移动到中心列表(central list)。需求回收 G 是一种节省分配成本的好方法。但是,由于堆栈是动态增长的,现有的G 最终可能会有一个大栈。因此,当堆栈增长(即超过2K)时,Go 不会保留这些栈。
最后
希望和你一起遇见更好的自己
看到这里啦,就点个关注再走吧~