
【小白向】基于YOLOV5的数据集标注,训练,Windows/Linux/Jetson Nano多平台部署全流程
【需要申明的和本文无关的事情】大家好,我是BBuf,我想在这篇技术文章之前声明一下,本公众号已经关闭了所有交流群的入群方式并且也不会维护交流群了。因为运营团队的几个人已经没有力气维护这种群和处理各种好友关系。我本人也关闭了微信的多种添加方式,之前文章放出的二维码也已经全部失效。对我自己而言,做这个公众号本身就仅仅是分享技术,我希望技术分享是纯粹的,不想太多被动打扰。如果你想继续和我们交流技术问题可以到 www.giantpandacv.com 小站给我们留言,每篇文章下面都有留言窗口。这个小站在国庆期间会有一次改版,将留下这个公众号以往>=中等质量的文章,其它的将删除。我个人更加希望读者有问题可以直接在这个小站对应的github仓库(https://github.com/BBuf/giantpandacv.com)直接提issue ,运营团队看到了会尽量给与解答,并且回答issue的概率会很高。所以想对所有最近才关注的粉丝们说抱歉,我们不会提供常见的公众号那种交流群了,如果你想联系我们讨论学术或者技术问题或者投稿请上https://github.com/BBuf/giantpandacv.com提issue或者在giantpandacv小站的评论区留言,如果是投稿我们会主要添加你好友。以上。
【小白向】基于YOLOV5的数据集标注,训练,Windows/Linux/Jetson Nano多平台部署全流程
准备工作和数据标注
1. 安装配置Cuda, Cudnn, Pytorch该部分不进行详细介绍, 具体过程请百度.此处小编使用Pytorch1.9.
2. 制作自己的数据集
这里小编给大家准备了一个人体检测的数据集,供大家测试使用.
链接:https://pan.baidu.com/s/1lpyNNdYqdKj8R-RCQwwCWg 提取码:6agk
3. 数据集准备工作.
(1) 层级关系
yolov5数据集所需的文件夹结构,以小编提供的数据集为例.
people文件夹下包含两个子文件夹images(用于存放图片)和labels(用于存放标签文件).
images文件夹下包含train和val两个文件夹,分别存放训练集的图片和验证集的图片.
labels文件夹下包含train和val两个文件夹,分别存放训练集的标签和验证集的标签.
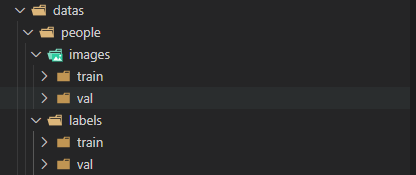
dataset.png
(2) 下载标注软件
这里小编自己编写了一款标注软件,直接支持导出yolov5格式。
链接:https://pan.baidu.com/s/1AI5f5BYbboK0KYpHf7v4-A 提取码:19o1
(3) 准备需要标注的数据(注意本软件单次只能标注1000张,建议单次500张以下)
这里我简单准备了5张猫狗数据的。
(4) 准备标签文件
新建一个labels.txt文件(名字任意).将类名按照自己需要的顺序进行输入(注意,这里的顺序关系到最后导出yolov5 labels文件的标签顺序)
4. 开始标注.
(1) 导入图片和标签文件
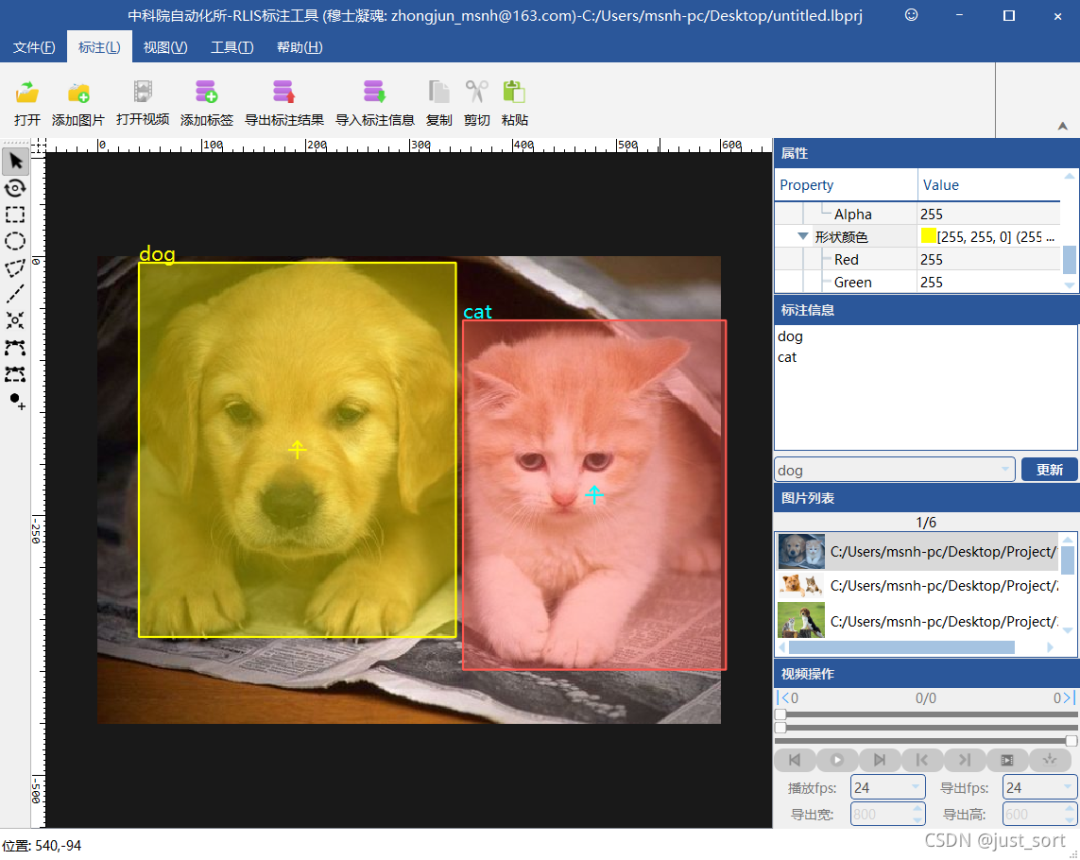
打开CasiaLabeler软件.点击 标注>打开 导入图片.
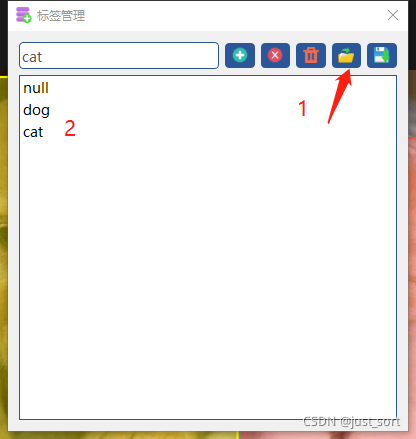
点击 标注>添加标签导入标签. 选择之前创建的标签文件,导入后如图.
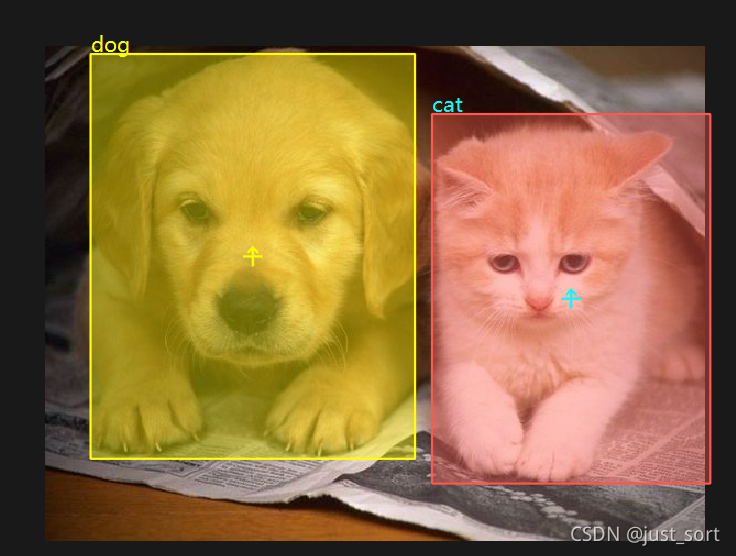
(2) 开始标注并指定标签
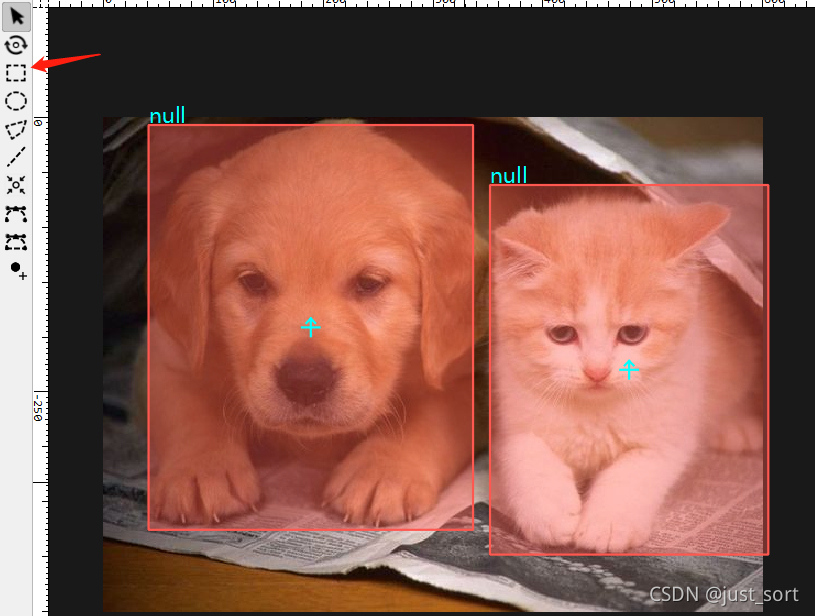
初步框选标注对象。
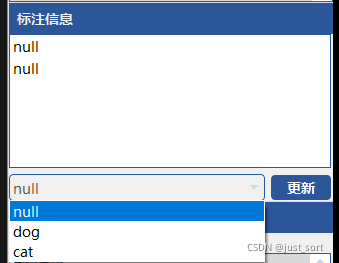
在标注信息栏,修改目标的标签。
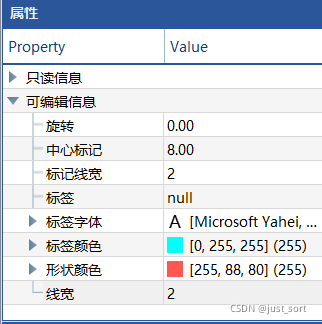
在属性窗口可以修改标注框的颜色。
完成之后。(PS.标注框可以通过Ctrl+C和Ctrl+V进行复制粘贴)
(3) 导出标注结果
点击 标注>导出标注结果>yolov5 ,并指定一个空文件夹.
(4) 整理数据集层级结构
PS.
1.标注过程请及时保存工程文件
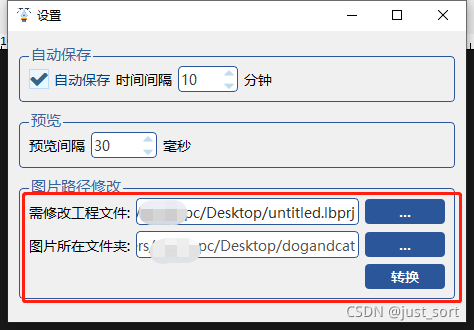
2.第一次保存工程后,会在工程目录下间隔一定时间自动保存工程。可以点击 帮助>设置 选择自动保存时间间隔。
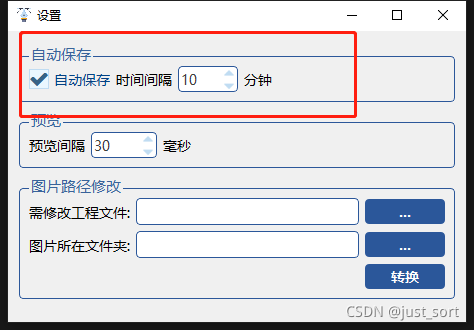
标注工程保存间隔时间设置,可调节 3.标注完成后,可以自动切换下一张预览标注结果。点击 视图>预览 即可自动切换标注场景,切换间隔时间按可以点击 帮助>设置 设置预览间隔时间.
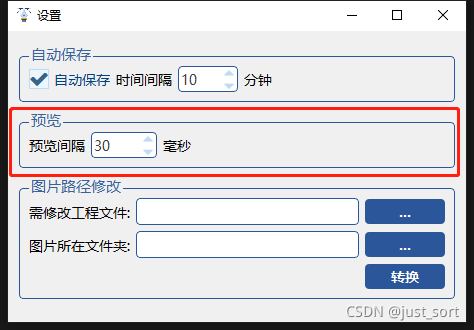
设置预览间隔时间 4.在标注一部分图片后,图片的位置发生了变化,或者图片拷贝至另外一台的电脑上,则会出现路径丢失的情况。
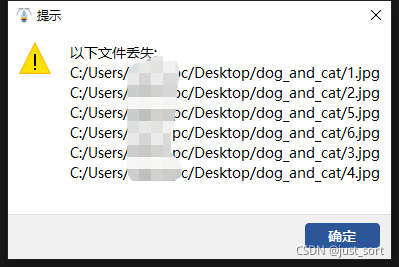
容错机制 5.丢失解决方法,点击 帮助>设置.在图片路径修改处,选择需要修改的工程,并指定图片新的路径,点击 转换 即可完成工程文件修复。再次打开工程即可。
丢失解决方法
5. 准备Yolov5代码
1 Clone代码
git clone https://github.com/msnh2012/MsnhnetModelZoo.git(注意!必须Clone小编为msnhnet定制的代码!)
2 安装依赖
pip install requirements.txt(可以手动安装)
6. 准备Yolov5预训练模型
(1) 这里小编已经给大家准备好了预训练模型(yolov5_pred文件夹中)
链接:https://pan.baidu.com/s/1lpyNNdYqdKj8R-RCQwwCWg 提取码:6agk
(2) 将下载好的预训练模型文件拷贝至yolov5ForMsnhnet/yolov5/weights文件夹下
模型训练
1. 准备工作
(1) 数据集准备(这里以people数据集为例)
将标注好的数据集放置在datas文件夹下。
在datas文件夹下创建一个people.yaml文件,用于配置数据集信息
train: 训练集图片位置
val: 验证集图片位置
nc: 类别数量
names: 所有类的名称
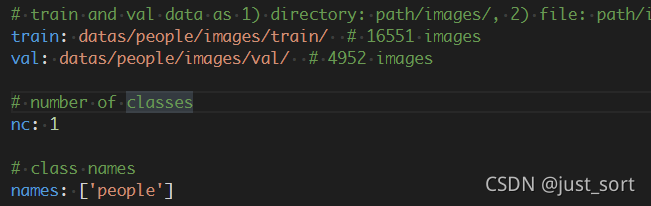
yaml文件配置
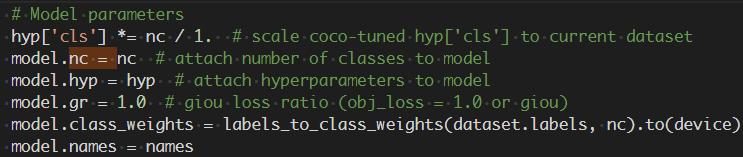
(2) 选择所需训练的模型(这里以yolov5m为例)
在models文件夹下,复制一份yolov5m.yaml,重新命名为yolov5m_people.yaml.
将nc改为1(还是一样,改成数据集的类的个数).
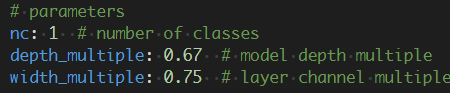
nc代表数据集目标类别总数
(3) 关于anchors
# anchors
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
anchors参数共有三行,每行9个数值;每一行代表不同的特征图;
第一行是在最大的特征图上的anchors
第二行是在中间的特征图上的anchors
第三行是在最小的特征图上的anchors
yolov5会在训练最开始自动对anchors进行check(可以修改 train.py中以下代码使用或者不使用自动anchor).
parser.add_argument('--noautoanchor', action='store_true', help='disable autoanchor check')
如果标注信息对anchor的最佳召回率>=0.98,则不需要重新计算anchors, 反之则需要从新计算。
check代码如下:
参数: dataset: 数据集 model: 模型 thr: dataset中标注框宽高比最大阈值,参数在超参文件 hyp.scratch.yaml"中"anchor_t"设置。 imgsz: 图片尺寸
def check_anchors(dataset, model, thr=4.0, imgsz=640):
# Check anchor fit to data, recompute if necessary
print('\nAnalyzing anchors... ', end='')
m = model.module.model[-1] if hasattr(model, 'module') else model.model[-1] # Detect()
shapes = imgsz * dataset.shapes / dataset.shapes.max(1, keepdims=True)
scale = np.random.uniform(0.9, 1.1, size=(shapes.shape[0], 1)) # augment scale
wh = torch.tensor(np.concatenate([l[:, 3:5] * s for s, l in zip(shapes * scale, dataset.labels)])).float() # wh
def metric(k): # compute metric
r = wh[:, None] / k[None]
x = torch.min(r, 1. / r).min(2)[0] # ratio metric
best = x.max(1)[0] # best_x
aat = (x > 1. / thr).float().sum(1).mean() # anchors above threshold
bpr = (best > 1. / thr).float().mean() # best possible recall
return bpr, aat
bpr, aat = metric(m.anchor_grid.clone().cpu().view(-1, 2))
print('anchors/target = %.2f, Best Possible Recall (BPR) = %.4f' % (aat, bpr), end='')
if bpr < 0.98: # threshold to recompute
print('. Attempting to generate improved anchors, please wait...' % bpr)
na = m.anchor_grid.numel() // 2 # number of anchors
new_anchors = kmean_anchors(dataset, n=na, img_size=imgsz, thr=thr, gen=1000, verbose=False)
new_bpr = metric(new_anchors.reshape(-1, 2))[0]
if new_bpr > bpr: # replace anchors
new_anchors = torch.tensor(new_anchors, device=m.anchors.device).type_as(m.anchors)
m.anchor_grid[:] = new_anchors.clone().view_as(m.anchor_grid) # for inference
m.anchors[:] = new_anchors.clone().view_as(m.anchors) / m.stride.to(m.anchors.device).view(-1, 1, 1) # loss
check_anchor_order(m)
print('New anchors saved to model. Update model *.yaml to use these anchors in the future.')
else:
print('Original anchors better than new anchors. Proceeding with original anchors.')
print('') # newline
聚类anchor代码: 参数: path: 之前创建的people.yaml数据集配置文件路径 n: anchors 组数量 xx,xx为一组 img_size: 图片尺寸 thr: dataset中标注框宽高比最大阈值,参数在超参文件 hyp.scratch.yaml"中"anchor_t"设置。 gen: kmean算法iter次数 verbose: 是否打印结果
def kmean_anchors(path='./data/coco128.yaml', n=9, img_size=640, thr=4.0, gen=1000, verbose=True):
""" Creates kmeans-evolved anchors from training dataset
Arguments:
path: path to dataset *.yaml, or a loaded dataset
n: number of anchors
img_size: image size used for training
thr: anchor-label wh ratio threshold hyperparameter hyp['anchor_t'] used for training, default=4.0
gen: generations to evolve anchors using genetic algorithm
Return:
k: kmeans evolved anchors
Usage:
from utils.general import *; _ = kmean_anchors()
"""
thr = 1. / thr
def metric(k, wh): # compute metrics
r = wh[:, None] / k[None]
x = torch.min(r, 1. / r).min(2)[0] # ratio metric
# x = wh_iou(wh, torch.tensor(k)) # iou metric
return x, x.max(1)[0] # x, best_x
def fitness(k): # mutation fitness
_, best = metric(torch.tensor(k, dtype=torch.float32), wh)
return (best * (best > thr).float()).mean() # fitness
def print_results(k):
k = k[np.argsort(k.prod(1))] # sort small to large
x, best = metric(k, wh0)
bpr, aat = (best > thr).float().mean(), (x > thr).float().mean() * n # best possible recall, anch > thr
print('thr=%.2f: %.4f best possible recall, %.2f anchors past thr' % (thr, bpr, aat))
print('n=%g, img_size=%s, metric_all=%.3f/%.3f-mean/best, past_thr=%.3f-mean: ' %
(n, img_size, x.mean(), best.mean(), x[x > thr].mean()), end='')
for i, x in enumerate(k):
print('%i,%i' % (round(x[0]), round(x[1])), end=', ' if i < len(k) - 1 else '\n') # use in *.cfg
return k
if isinstance(path, str): # *.yaml file
with open(path) as f:
data_dict = yaml.load(f, Loader=yaml.FullLoader) # model dict
from utils.datasets import LoadImagesAndLabels
dataset = LoadImagesAndLabels(data_dict['train'], augment=True, rect=True)
else:
dataset = path # dataset
# Get label wh
shapes = img_size * dataset.shapes / dataset.shapes.max(1, keepdims=True)
wh0 = np.concatenate([l[:, 3:5] * s for s, l in zip(shapes, dataset.labels)]) # wh
# Filter
i = (wh0 < 3.0).any(1).sum()
if i:
print('WARNING: Extremely small objects found. '
'%g of %g labels are < 3 pixels in width or height.' % (i, len(wh0)))
wh = wh0[(wh0 >= 2.0).any(1)] # filter > 2 pixels
# Kmeans calculation
print('Running kmeans for %g anchors on %g points...' % (n, len(wh)))
s = wh.std(0) # sigmas for whitening
k, dist = kmeans(wh / s, n, iter=30) # points, mean distance
k *= s
wh = torch.tensor(wh, dtype=torch.float32) # filtered
wh0 = torch.tensor(wh0, dtype=torch.float32) # unflitered
k = print_results(k)
# Plot
# k, d = [None] * 20, [None] * 20
# for i in tqdm(range(1, 21)):
# k[i-1], d[i-1] = kmeans(wh / s, i) # points, mean distance
# fig, ax = plt.subplots(1, 2, figsize=(14, 7))
# ax = ax.ravel()
# ax[0].plot(np.arange(1, 21), np.array(d) ** 2, marker='.')
# fig, ax = plt.subplots(1, 2, figsize=(14, 7)) # plot wh
# ax[0].hist(wh[wh[:, 0]<100, 0],400)
# ax[1].hist(wh[wh[:, 1]<100, 1],400)
# fig.tight_layout()
# fig.savefig('wh.png', dpi=200)
# Evolve
npr = np.random
f, sh, mp, s = fitness(k), k.shape, 0.9, 0.1 # fitness, generations, mutation prob, sigma
pbar = tqdm(range(gen), desc='Evolving anchors with Genetic Algorithm') # progress bar
for _ in pbar:
v = np.ones(sh)
while (v == 1).all(): # mutate until a change occurs (prevent duplicates)
v = ((npr.random(sh) < mp) * npr.random() * npr.randn(*sh) * s + 1).clip(0.3, 3.0)
kg = (k.copy() * v).clip(min=2.0)
fg = fitness(kg)
if fg > f:
f, k = fg, kg.copy()
pbar.desc = 'Evolving anchors with Genetic Algorithm: fitness = %.4f' % f
if verbose:
print_results(k)
return print_results(k)
(4) train文件
复制一个train.py文件命名为train_people.py.修改模型参数
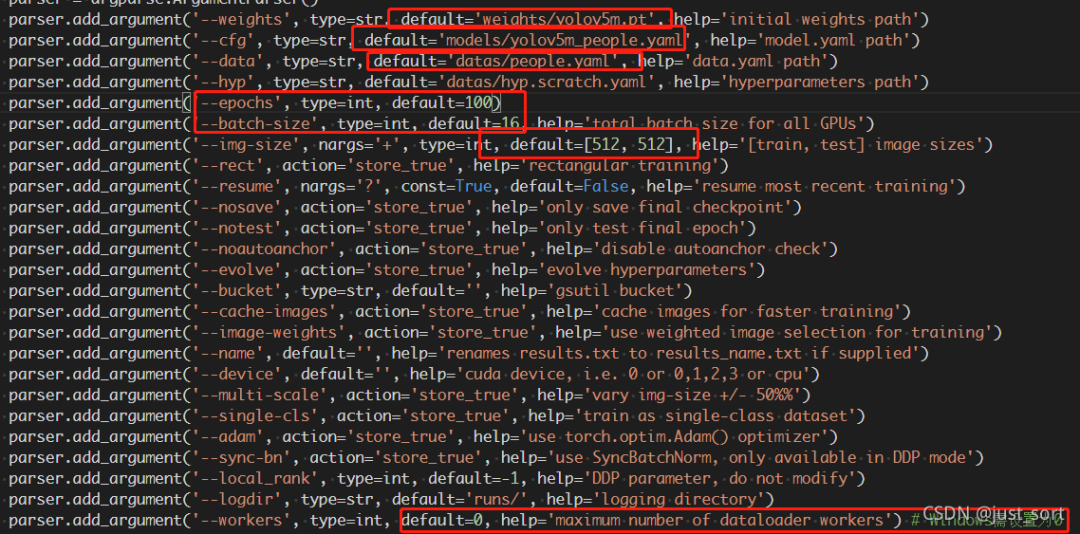
修改opt参数
weights: 加载的权重文件(weights文件夹下yolov5m.pt) cfg: 模型配置文件,网络结构(model文件夹下yolov5m_people.yaml) data: 数据集配置文件,数据集路径,类名等(datas文件夹下people.yaml) hyp: 超参数文件 epochs: 训练总轮次 batch-size: 批次大小 img-size: 输入图片分辨率大小(512*512) rect: 是否采用矩形训练,默认False resume: 接着打断训练上次的结果接着训练 nosave: 不保存模型,默认False notest: 不进行test,默认False noautoanchor: 不自动调整anchor,默认False evolve: 是否进行超参数进化,默认False bucket: 谷歌云盘bucket,一般不会用到 cache-images: 是否提前缓存图片到内存,以加快训练速度,默认False name: 数据集名字,如果设置:results.txt to results_name.txt,默认无 device: 训练的设备,cpu;0(表示一个gpu设备cuda:0);0,1,2,3(多个gpu设备) multi-scale: 是否进行多尺度训练,默认False single-cls: 数据集是否只有一个类别,默认False adam: 是否使用adam优化器 sync-bn: 是否使用跨卡同步BN,在DDP模式使用 local_rank: gpu编号 logdir: 存放日志的目录 workers: dataloader的最大worker数量(windows需设置为0)
2. 开始train
python train_people.py
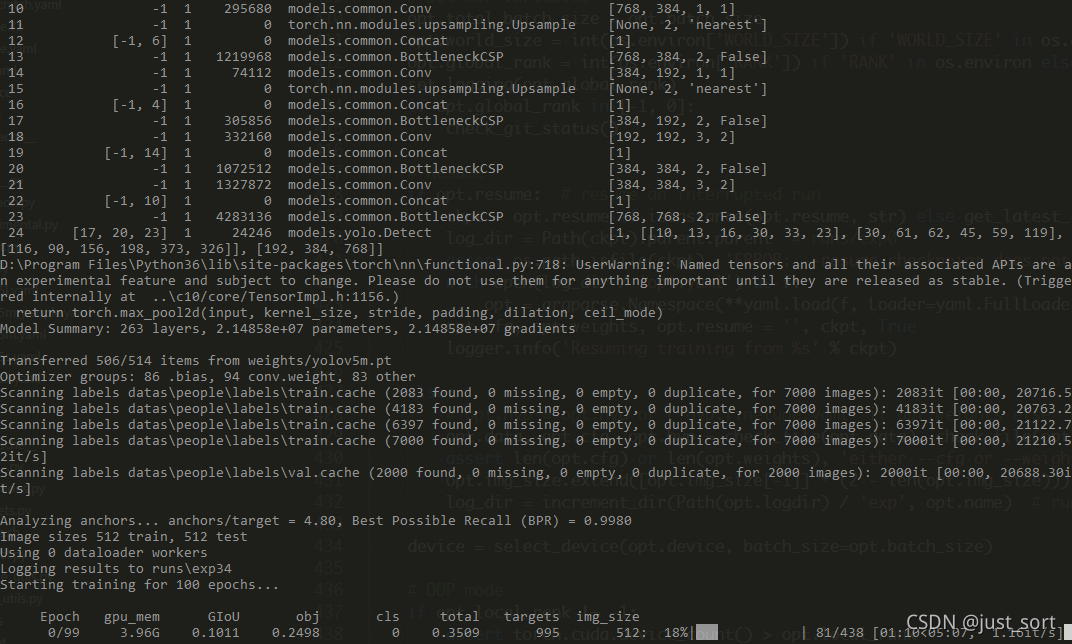
训练过程中,会在yolov5/runs文件夹下生成一个exp文件夹,
weights包含训练过程中最后一次训练好的模型last.pt和历史最佳模型best.pt。
events文件可以使用tensorboard查看训练过程。 在exp文件夹中,打开终端,运行
tensorboard --logdir=.在浏览器中输入http://localhost:6006/可查看训练过程与曲线.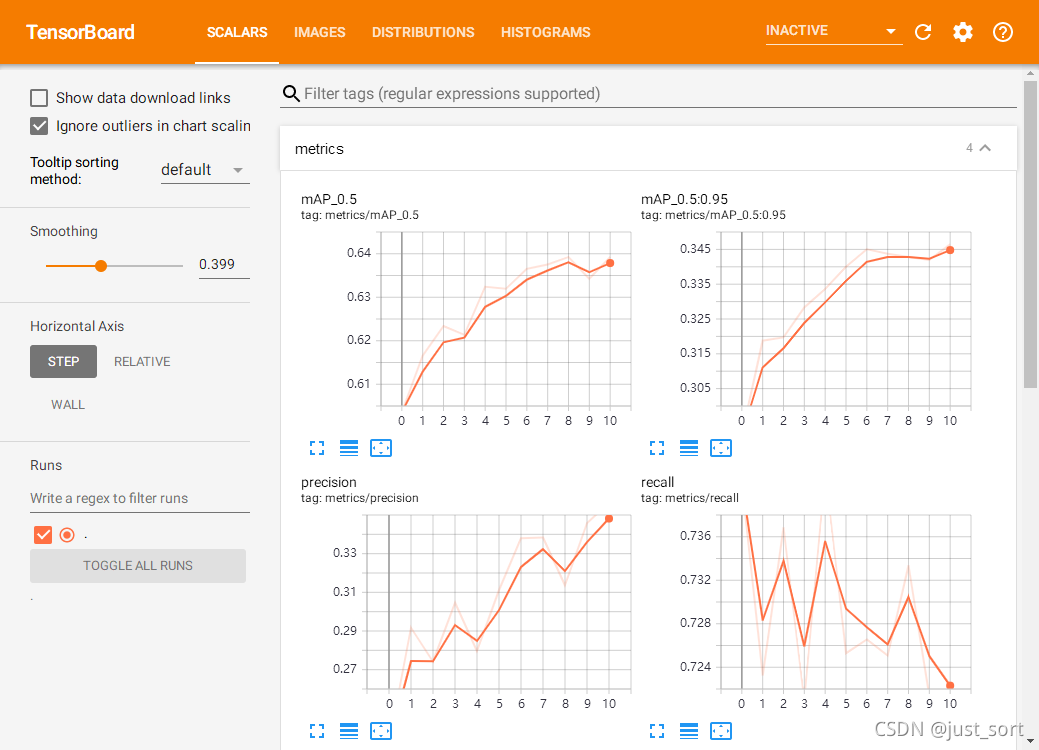
其它过程文件。
推理测试
将runs/exp文件夹下的best.pt文件拷贝到weights文件夹下。 在inference/images文件夹下放置几个测试图片。这里放置一张官方的bus.jpg

在yolov5文件夹中打开终端,执行:
python detect --weights weights/best.pt --source inference/images --output inference/output
在inference/output文件夹中会生成推理结果。

至此,使用pytorch训练yolov5模型完成,下一节将介绍如何在CMake(c++),Winform(C#)以及windows(PC),linux(Jetson Nx)中使用Msnhnet部署yolov5.
基于MsnhNet部署yolov5
本篇将分windows和linux, pc和jetson nx平台分别给大家讲解如何使用Msnhnet部署yolov5.
pytorch模型转msnhnet
在yolov5文件夹下打开终端。将best.pt拷贝至weights文件夹下。执行
python yolov5ToMsnhnet.py
yolov5ToMsnhnet.py文件内容:
from PytorchToMsnhnet import *
Msnhnet.Export = True
from models.experimental import attempt_load
import torch
weights = "weights/best.pt" # pt文件
msnhnetPath = "yolov5m.msnhnet" # 导出.msnhnet文件
msnhbinPath = "yolov5m.msnhbin" # 导出.msnhbin文件
model = attempt_load(weights, "cpu")
model.eval() # cpu模式,推理模式
img = torch.rand(512*512*3).reshape(1,3,512,512) #生成随机推理数据
tans(model,img,msnhnetPath,msnhbinPath) #模型转换
导出成功后会在文件夹下生成yolov5m.msnhnet和yolov5m.msnhbin文件。
Windows 篇
1. 准备工作
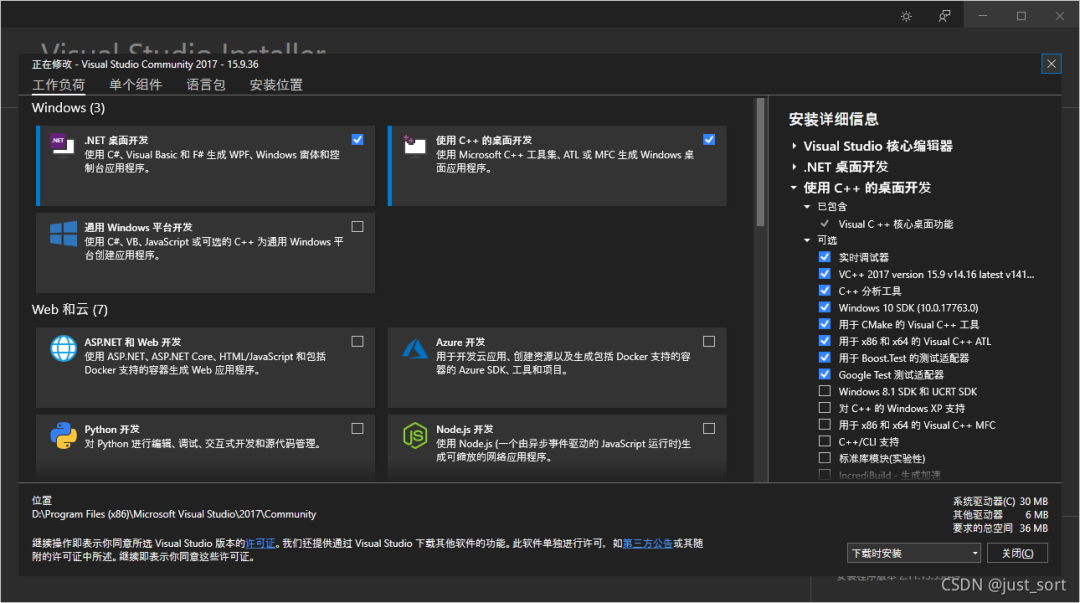
(1) 安装Visual studio
网址:https://visualstudio.microsoft.com/zh-hans/
下载visual studio 2017以上任意版本进行安装。此处勾选.Net桌面开发和使用c++的桌面开发。
(2) 安装cuda和cudnn, 此处请自行百度.
cuda网址:https://developer.nvidia.com/cuda-downloads
cudnn网址:https://developer.nvidia.com/zh-cn/cudnn
下载cudaxx.exe文件安装cuda(此过程最好使用cuda中自带的显卡驱动程序),下载cudnnxxx.zip文件,将其解压到 C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\vxx.xx文件夹下,即完成了cuda和cudnn配置。
将C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\vxx.xx 添加到系统环境变量。
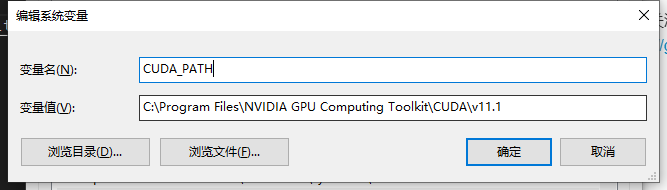
设置CUDA环境变量
(3) 打开cmd, 输入nvcc.测试cuda是否安装完成。以下结果说明cuda配置完成。

(4) 安装cmake(建议3.17).
cmake下载网址:https://cmake.org/files/v3.17/
下载文件: cmake-3.17.5-win64-x64.msi
完成安装。
(5) clone Msnhnetgit clone https://github.com/msnh2012/Msnhnet.git
2. 编译OpenCV库
(1) 小编这里给大家准备好了OpenCV的源码文件,不用科学上网了。
链接:https://pan.baidu.com/s/1lpyNNdYqdKj8R-RCQwwCWg 提取码:6agk
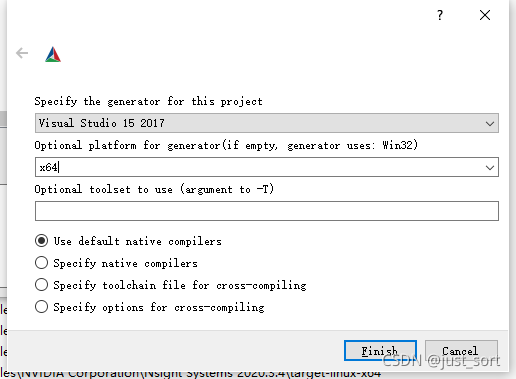
(2) 打开cmake-gui.exe。

(3) 点击config选择安装的visual studio版本,选择x64(此处以VS2017为例),点击Finish,等待配置完成.
(4) 参数配置.
- CMAKE_INSTALL_PREFIX #指定安装位置,如: D:/libs/opencv
- CPU_BASELINE #选择AVX2(如果CPU支持AVX2加速)
- BUILD_TESTS #取消勾选
(5) 点击generate->Generating done.
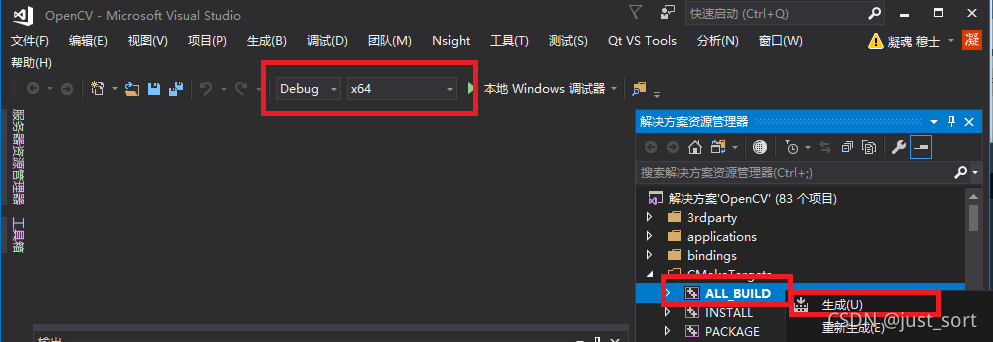
(6) 点击Open Project.分别选择Debug右键生成。(此过程需要等待10min~60min不等,根据电脑配置)
(7) 右键安装。(会将编译好的可执行文件安装在指定安装位置,如:D:/libs/opencv)
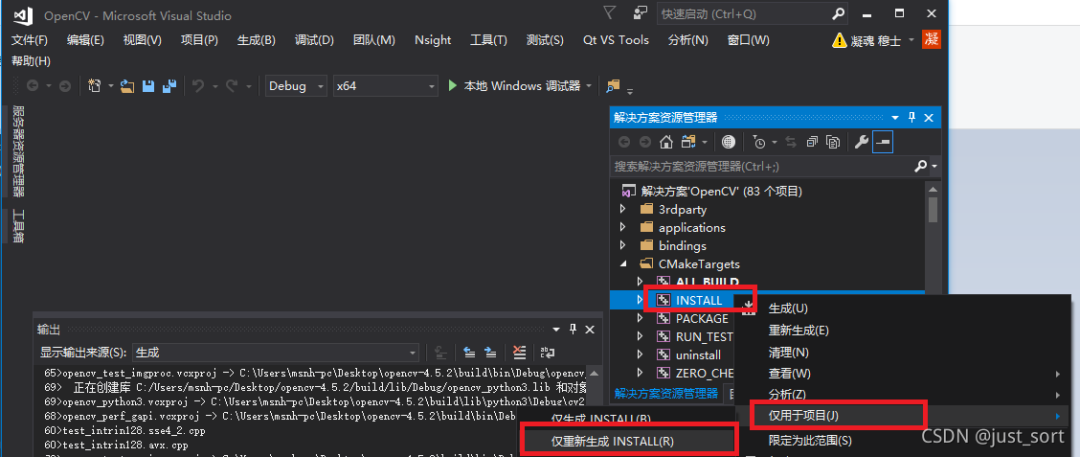
(8) 重复6-7步选择Release版本进行编译安装。
(9) 指定OpenCV_DIR环境变量,用于CMakeList能使用FindPackage找到OpenCV.
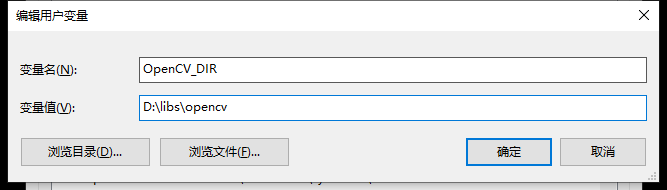
(10) 指定Path环境变量.在Path环境变量下添加Opencv的bin文件夹位置,如: D:\libs\opencv\x64\vc15\bin
3. 编译Msnhnet库
(1) 打开cmake-gui.exe。

(2) 点击config选择安装的visual studio版本,选择x64(此处以VS2017为例),点击Finish,等待配置完成.
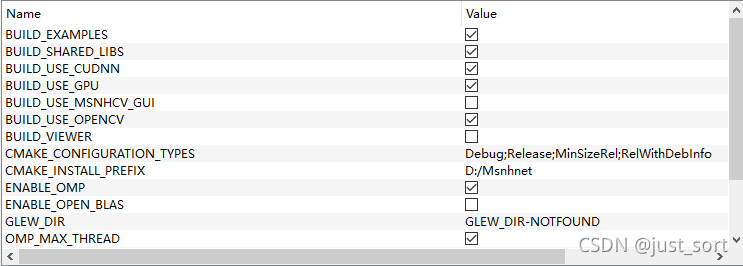
(3) 勾选以下参数。
- CMAKE_INSTALL_PREFIX #指定安装位置,如: D:/libs/Msnhnet
- BUILD_EXAMPLE #构建示例
- BUILD_SHARED_LIBS #构建动态链接库
- BUILD_USE_CUDNN #使用CUDNN
- BUILD_USE_GPU #使用GPU
- BUILD_USE_OPENCV #使用OPENCV
- ENABLE_OMP #使用OMP
- OMP_MAX_THREAD #使用最大核心数
(4) 点击generate->Generating done.
(5) 点击Open Project.分别选择Debug右键生成。
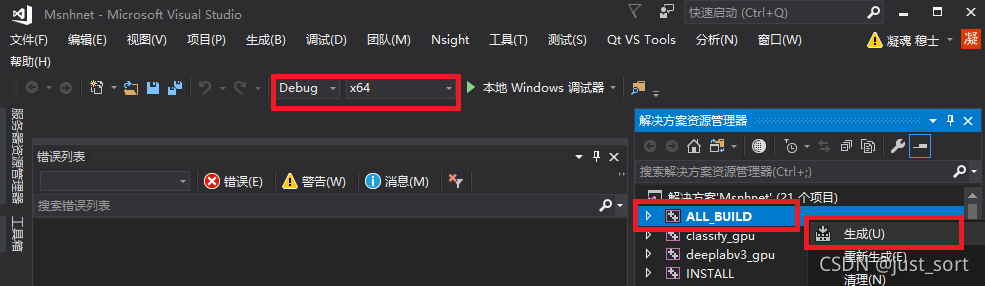
(6) 右键安装。(会将编译好的可执行文件安装在指定安装位置,如:D:/libs/Msnhnet)
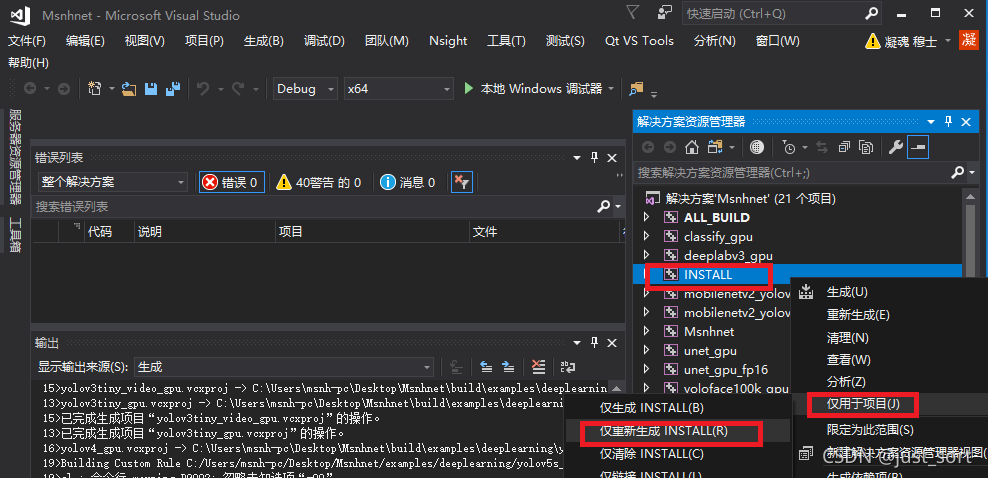
(7) 重复6-7步选择Release版本进行编译安装.
(8) 指定Msnhnet_DIR环境变量,用于CMakeList能使用FindPackage找到Msnhnet.
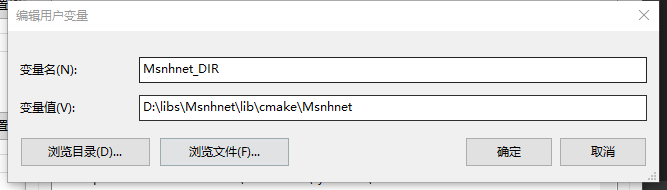
(9)指定Path环境变量.在Path环境变量下添加Msnhnet的bin文件夹位置,如: D:\libs\Msnhnet\bin
(10) 测试。
下载小编准备好的一系列Msnhnet测试模型。并解压到如D盘根目录 链接:https://pan.baidu.com/s/1mBaJvGx7tp2ZsLKzT5ifOg 提取码:x53z 在Msnhnet安装目录打开终端。执行
yolov3_gpu D:/models
yolov3_gpu_fp16 D:/models #fp16推理
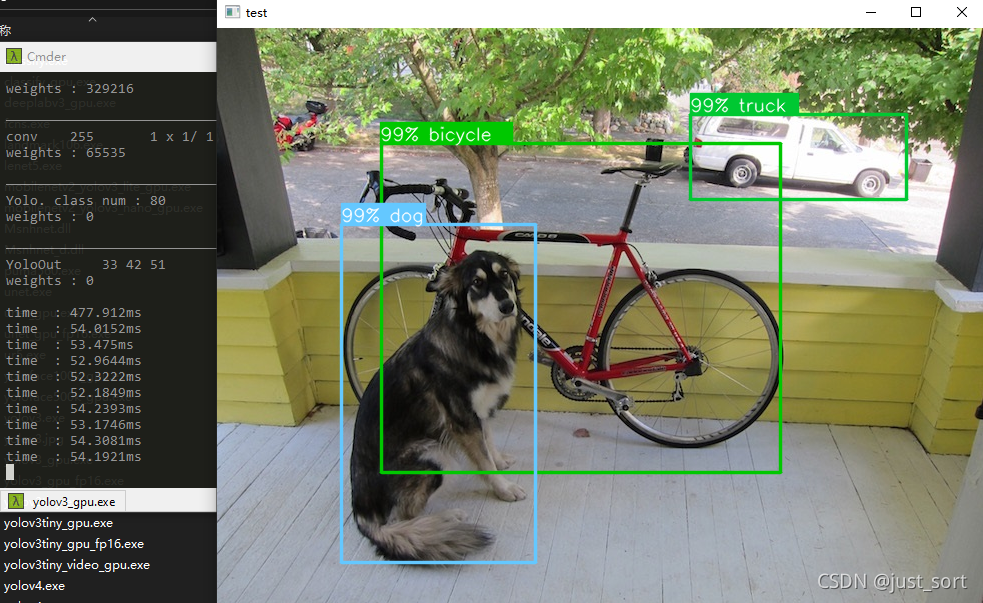
当然,你可以可以测试其它模型。
4. 使用C#部署Msnhnet
(1) clone MsnhnetSharp
git clone https://github.com/msnh2012/MsnhnetSharp
(2) 双击打开MsnhnetSharp.sln文件
(3) 选择x64平台和Release模式,右键生成MsnhnetSharp,再生成MsnhnetForm.
(4) 点击启动按钮。
(5) 在参数配置栏,分别指定msnhnetPath和msnhbinPath为之前导出的yolov5m的参数。然后将上一节制作好的labels.txt文件,复制一份,重命名为labels.names.
(6) 点击初始化网络。等待初始化完成,init done.
(7) 点击读取图片, 选择那张bus.jpg.
(8) 点击yolo GPU(Yolo Detect GPU). 第一次推理时间较长。
(9) 点击重置图片。
(10) 再次点击yolo GPU(Yolo Detect GPU). 随后推理时间正常.
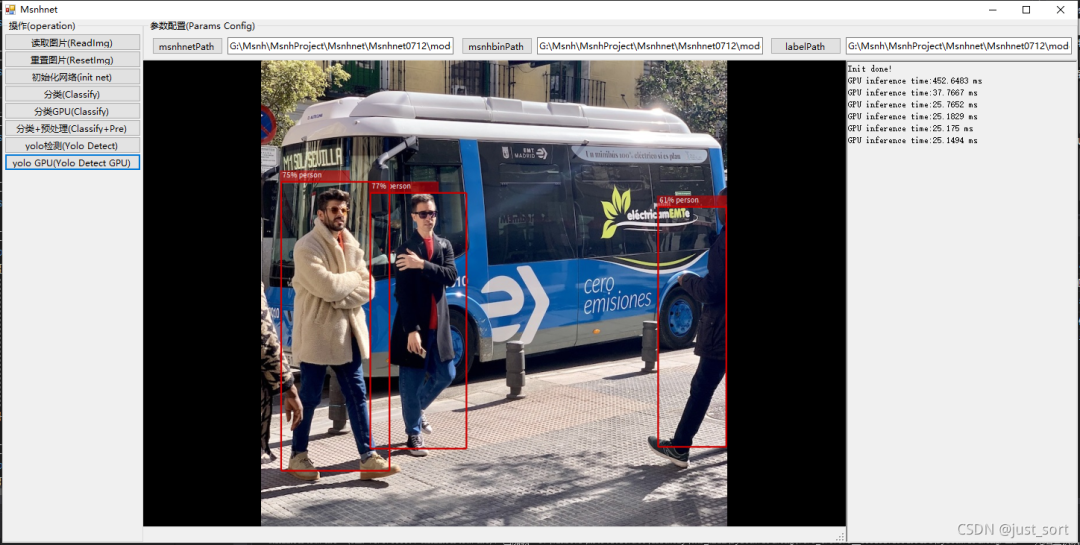
至此,使用C#部署Msnhnet完成,后续可以参考MsnhnetForm将MsnhnetSharp部署到你自己的工程中。
5. 使用CMake部署Msnhnet
工程文件源码: 链接:https://pan.baidu.com/s/1lpyNNdYqdKj8R-RCQwwCWg 提取码:6agk
(1) 新建MsnhnetPrj文件夹
(2) 将yolov5m.msnhnet,yolov5m.msnhbin,labels.txt拷贝到MsnhnetPrj文件夹内
(3) 新建CMakeLists.txt文件
cmake_minimum_required(VERSION 3.15)
project(yolov5m_msnhnet
LANGUAGES CXX C CUDA
VERSION 1.0)
find_package(OpenCV REQUIRED)
find_package(Msnhnet REQUIRED)
find_package(OpenMP REQUIRED)
add_executable(yolov5m_msnhnet yolov5m_msnhnet.cpp)
target_include_directories(yolov5m_msnhnet PUBLIC ${Msnhnet_INCLUDE_DIR})
target_link_libraries(yolov5m_msnhnet PUBLIC ${OpenCV_LIBS} Msnhnet)
(4) 新建yolov5m_msnhnet.cpp文件
#include <iostream>
#include "Msnhnet/net/MsnhNetBuilder.h"
#include "Msnhnet/io/MsnhIO.h"
#include "Msnhnet/config/MsnhnetCfg.h"
#include "Msnhnet/utils/MsnhOpencvUtil.h"
void yolov5sGPUOpencv(const std::string& msnhnetPath, const std::string& msnhbinPath, const std::string& imgPath, const std::string& labelsPath)
{
try
{
Msnhnet::NetBuilder msnhNet;
Msnhnet::NetBuilder::setOnlyGpu(true);
//msnhNet.setUseFp16(true); //开启使用FP16推理
msnhNet.buildNetFromMsnhNet(msnhnetPath);
std::cout<<msnhNet.getLayerDetail();
msnhNet.loadWeightsFromMsnhBin(msnhbinPath);
std::vector<std::string> labels ;
Msnhnet::IO::readVectorStr(labels, labelsPath.data(), "\n");
Msnhnet::Point2I inSize = msnhNet.getInputSize();
std::vector<float> img;
std::vector<std::vector<Msnhnet::YoloBox>> result;
img = Msnhnet::OpencvUtil::getPaddingZeroF32C3(imgPath, cv::Size(inSize.x,inSize.y));
for (size_t i = 0; i < 10; i++)
{
auto st = Msnhnet::TimeUtil::startRecord();
result = msnhNet.runYoloGPU(img);
std::cout<<"time : " << Msnhnet::TimeUtil::getElapsedTime(st) <<"ms"<<std::endl<<std::flush;
}
cv::Mat org = cv::imread(imgPath);
Msnhnet::OpencvUtil::drawYoloBox(org,labels,result,inSize);
cv::imshow("test",org);
cv::waitKey();
}
catch (Msnhnet::Exception ex)
{
std::cout<<ex.what()<<" "<<ex.getErrFile() << " " <<ex.getErrLine()<< " "<<ex.getErrFun()<<std::endl;
}
}
int main(int argc, char** argv)
{
std::string msnhnetPath = "yolov5m.msnhnet";
std::string msnhbinPath = "yolov5m.msnhbin";
std::string labelsPath = "labels.txt";
std::string imgPath = "bus.jpg";
yolov5sGPUOpencv(msnhnetPath, msnhbinPath, imgPath,labelsPath);
getchar();
return 0;
}
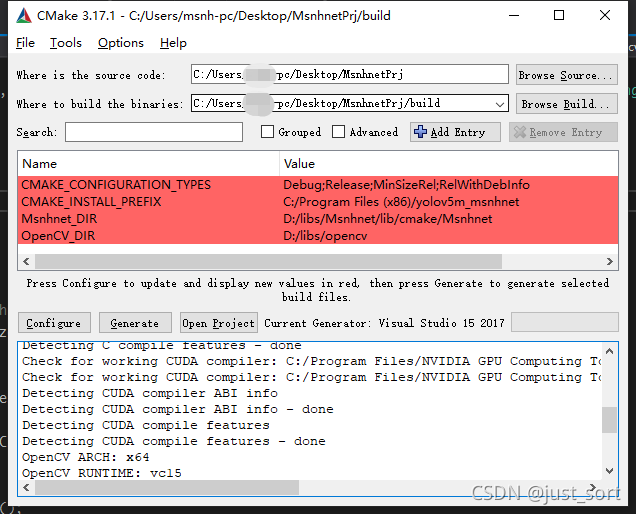
(5) 配置CMake
打开cmake-gui.exe,按以下配置.点击Config.Generate
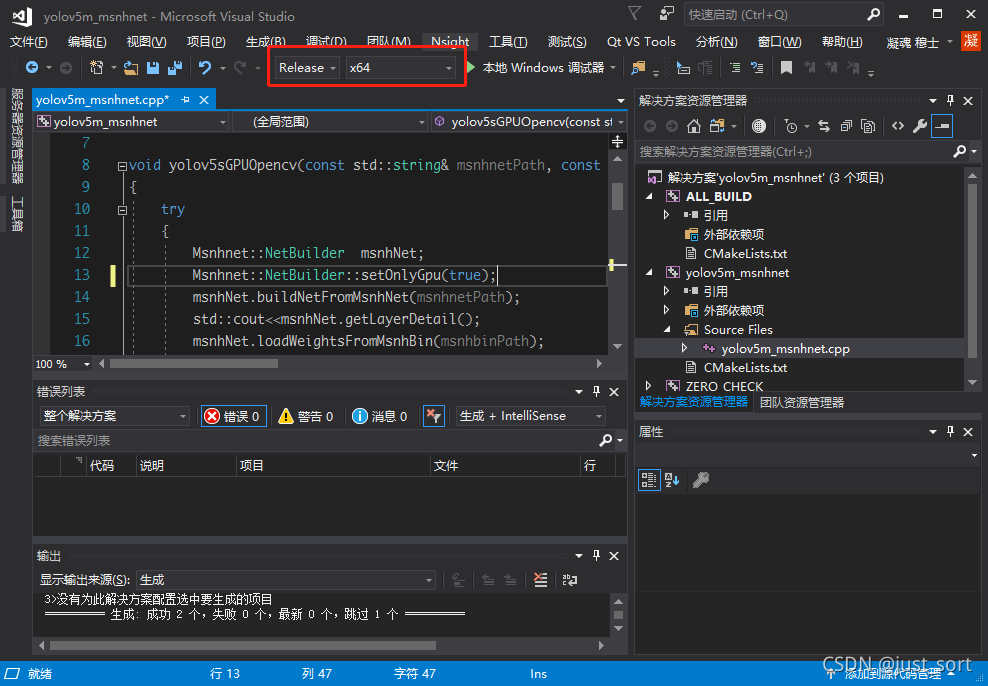
(6) 编译,点击Open Project,选择Release模式,参考之前编译Msnhnet直接生成。
(7) 拷贝可执行文件。 从MsnhnetPrj/build/Release/yolov5m_msnhnet.exe拷贝到MsnhnetPrj目录。
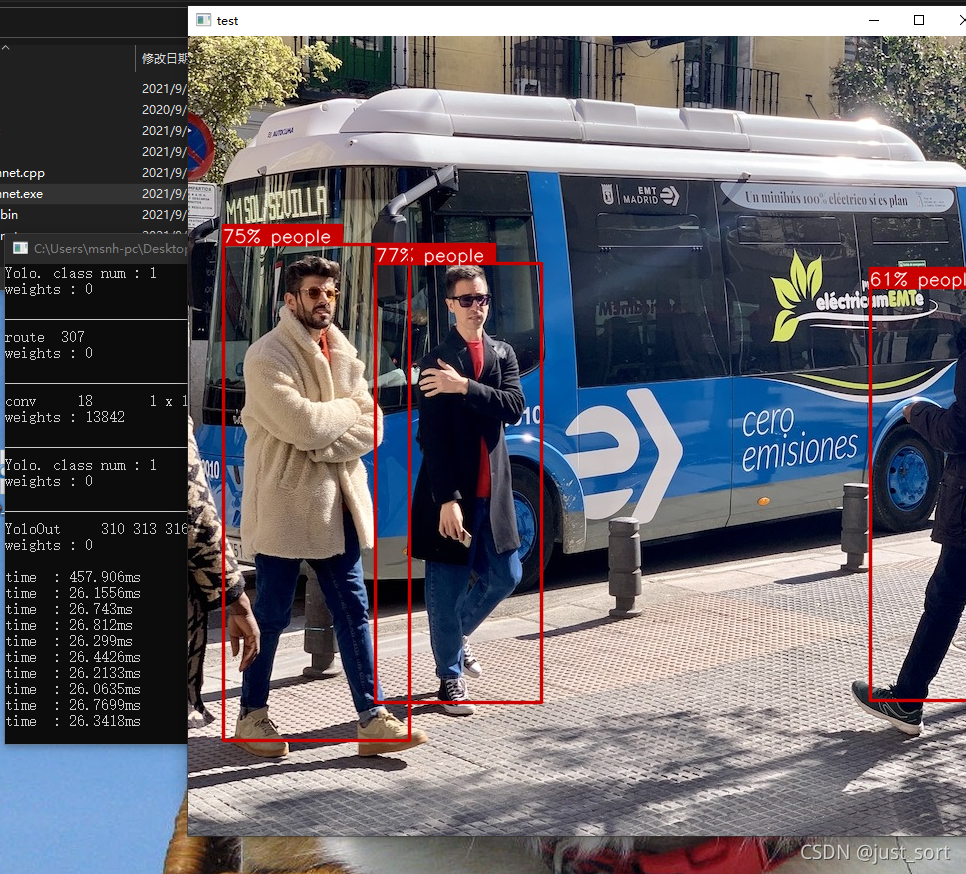
(8) 部署结果
双击yolov5m_msnhnet.exe查看部署结果
Linux(Jetson NX) 篇
1. 准备工作
一般来说,Jetson都已经自带了cuda和cudnn,故不用专门安装。
安装构建工具
sudo apt-get install build-essential
安装opencv
sudo apt-get install libopencv
2. 编译Msnhnet库
(1) 终端打开cmake-gui。

(2) 点击config选择cmake的编译链
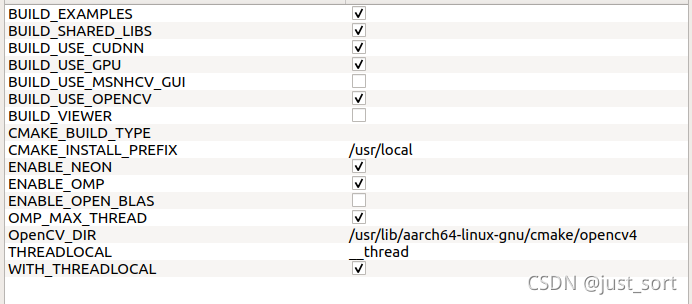
(3) 勾选以下参数。
- CMAKE_INSTALL_PREFIX #指定安装位置,如: D:/libs/Msnhnet
- BUILD_EXAMPLE #构建示例
- BUILD_SHARED_LIBS #构建动态链接库
- BUILD_USE_CUDNN #使用CUDNN
- BUILD_USE_GPU #使用GPU
- BUILD_USE_NEON #使用neon加速
- BUILD_USE_OPENCV #使用OPENCV
- ENABLE_OMP #使用OMP
- OMP_MAX_THREAD #使用最大核心数
(4) 点击generate->Generating done.
(5) 在Msnhnet/build文件夹中打开终端。
make -j
sudo make install
(6) 配置系统环境变量
sudo gedit /etc/ld.so.conf.d/usr.confg
# 添加: /usr/local/lib
sudo ldconfig
(7) 测试。
下载小编准备好的一系列Msnhnet测试模型。并解压到如home根目录 链接:https://pan.baidu.com/s/1mBaJvGx7tp2ZsLKzT5ifOg 提取码:x53z
cd /usr/local/bin
yolov3_gpu /home/xxx/models
yolov3_gpu_fp16 /home/xxx/models #fp16推理
当然,你可以可以测试其它模型。
3. 使用CMake部署Msnhnet
工程文件源码: 链接:https://pan.baidu.com/s/1lpyNNdYqdKj8R-RCQwwCWg 提取码:6agk
(1) 新建MsnhnetPrj文件夹
(2) 将yolov5m.msnhnet,yolov5m.msnhbin,labels.txt拷贝到MsnhnetPrj文件夹内
(3) 新建CMakeLists.txt文件
cmake_minimum_required(VERSION 3.15)
project(yolov5m_msnhnet
LANGUAGES CXX C CUDA
VERSION 1.0)
find_package(OpenCV REQUIRED)
find_package(Msnhnet REQUIRED)
find_package(OpenMP REQUIRED)
add_executable(yolov5m_msnhnet yolov5m_msnhnet.cpp)
target_include_directories(yolov5m_msnhnet PUBLIC ${Msnhnet_INCLUDE_DIR})
target_link_libraries(yolov5m_msnhnet PUBLIC ${OpenCV_LIBS} Msnhnet)
(4) 新建yolov5m_msnhnet.cpp文件
#include <iostream>
#include "Msnhnet/net/MsnhNetBuilder.h"
#include "Msnhnet/io/MsnhIO.h"
#include "Msnhnet/config/MsnhnetCfg.h"
#include "Msnhnet/utils/MsnhOpencvUtil.h"
void yolov5sGPUOpencv(const std::string& msnhnetPath, const std::string& msnhbinPath, const std::string& imgPath, const std::string& labelsPath)
{
try
{
Msnhnet::NetBuilder msnhNet;
Msnhnet::NetBuilder::setOnlyGpu(true);
//msnhNet.setUseFp16(true); //开启使用FP16推理
msnhNet.buildNetFromMsnhNet(msnhnetPath);
std::cout<<msnhNet.getLayerDetail();
msnhNet.loadWeightsFromMsnhBin(msnhbinPath);
std::vector<std::string> labels ;
Msnhnet::IO::readVectorStr(labels, labelsPath.data(), "\n");
Msnhnet::Point2I inSize = msnhNet.getInputSize();
std::vector<float> img;
std::vector<std::vector<Msnhnet::YoloBox>> result;
img = Msnhnet::OpencvUtil::getPaddingZeroF32C3(imgPath, cv::Size(inSize.x,inSize.y));
for (size_t i = 0; i < 10; i++)
{
auto st = Msnhnet::TimeUtil::startRecord();
result = msnhNet.runYoloGPU(img);
std::cout<<"time : " << Msnhnet::TimeUtil::getElapsedTime(st) <<"ms"<<std::endl<<std::flush;
}
cv::Mat org = cv::imread(imgPath);
Msnhnet::OpencvUtil::drawYoloBox(org,labels,result,inSize);
cv::imshow("test",org);
cv::waitKey();
}
catch (Msnhnet::Exception ex)
{
std::cout<<ex.what()<<" "<<ex.getErrFile() << " " <<ex.getErrLine()<< " "<<ex.getErrFun()<<std::endl;
}
}
int main(int argc, char** argv)
{
std::string msnhnetPath = "../yolov5m.msnhnet";
std::string msnhbinPath = "../yolov5m.msnhbin";
std::string labelsPath = "../labels.txt";
std::string imgPath = "../bus.jpg";
yolov5sGPUOpencv(msnhnetPath, msnhbinPath, imgPath,labelsPath);
getchar();
return 0;
}
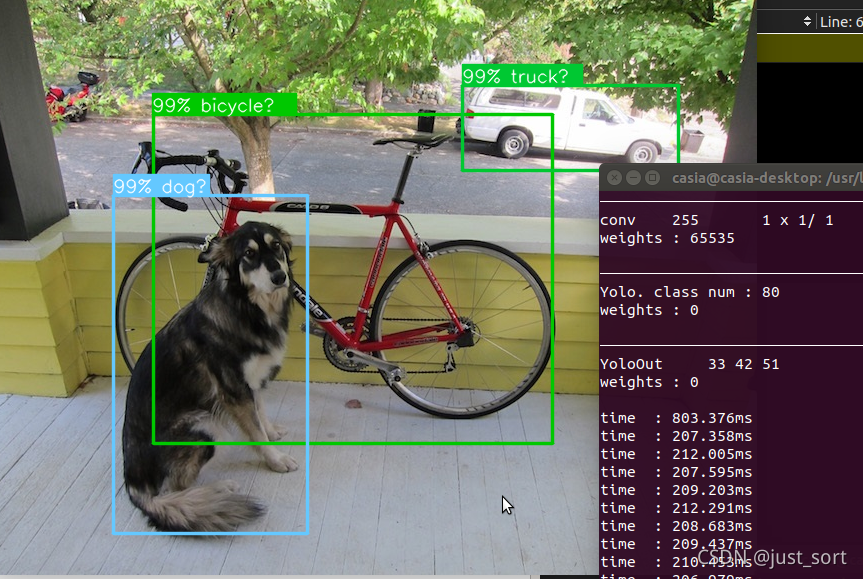
(5) 编译,在MsnhnetPrj文件夹下打开终端
mkdir build
cd build
make
./yolov5m_msnhnet
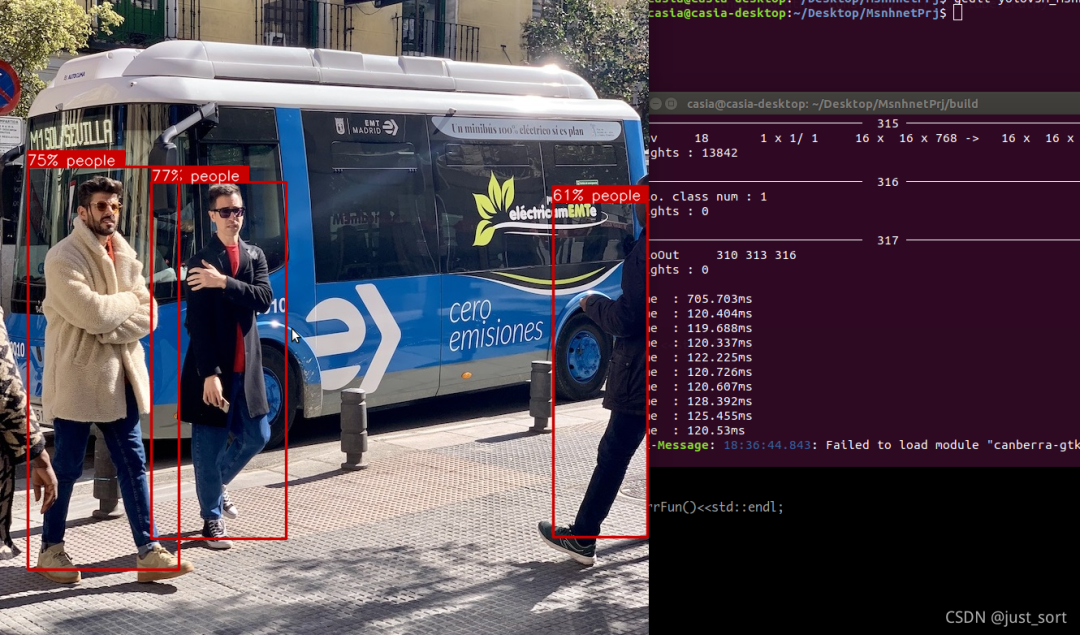
(6) 部署结果
Linux(PC) 篇
和Jetson Nx部署类似, 主要区别是先要在Linux上配置好cuda和cudnn, 然后卸载CMake, 安装CMake 3.17版本. 其它的和Jestson NX一样.(ps. 在CMake参数配置里没有NEON项,此为ARM平台专有)
到此,使用Msnhnet从0到部署Yolov5网络完成。
最后
欢迎关注我和BBuf及公众号的小伙伴们一块维护的一个深度学习框架Msnhnet: https://github.com/msnh2012/Msnhnet