
DETR:基于 Transformers 的目标检测
共 7049字,需浏览 15分钟
·
2021-04-12 17:12
 点蓝色字关注“机器学习算法工程师”
点蓝色字关注“机器学习算法工程师”
设为星标,干货直达!
编辑:我是小将
前言
最近可以说是随着 ViT 的大火,几乎可以说是一天就能看到一篇基于 Transformers 的 CV 论文,今天给大家介绍的是另一篇由Facebook 在 ECCV2020 上发表的一篇基于 Transformers 的目标检测论文,这篇论文也是后续相当多的 Transformers 检测/分割的 baseline,透过这篇论文我们来了解其套路.
相关工作
提到目标检测,我们先来简要回顾一下最基础的一个工作 Faster R-CNN
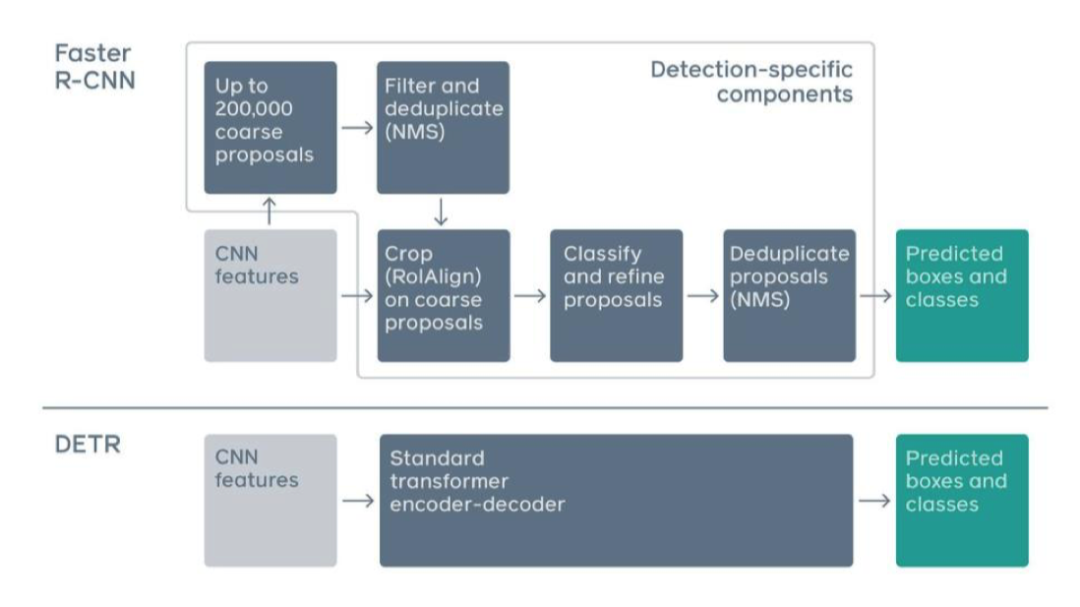
Faster R-CNN第一步是用 CNN 给图像提特征,再通过非极大值抑制算法提取出候选框,最后预测每个候选框的位置和类别,
DETR 的实现原理
DETR 这篇文章就极大的简化了这个过程,他把候选框提取的过程通过一个标准的 Transformers encoder-decoder 架构代替,在 decoder 部分直接预测出来物体的位置和类别.
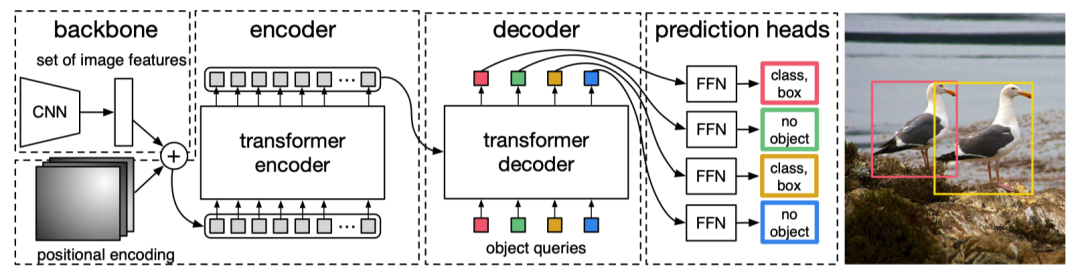
流程分为三步:
CNN 提特征 Transformers 的 encoder-decoder进行信息的融合 FFN 预测 class 和 box
CNN
利用resnet-50网络,将输入的图像 变成尺度为 的特征,再通过一个 1X1 卷积,将 channel 从 2048 变为更小(通常 512)
Transformers encoder-decoder
Transformer encoder部分首先将输入的特征图降维并flatten 成 d 个 HXW 维的向量,每个向量作为输入的 token,由于Self-attention 是置换不变形的,所以为了体现每个 token 在原图中的顺序关系,我们给每个 token 加上一个 positional encodings.输出这是对应Decoder 部分的 V 和 K.
比如说我们一开始输入的图片是 512*512,那么d 应该是256.
Transformers decoder 部分是输入是 100 个 Object queries,比如说我们数据集总共有100个类别的物体需要预测,那么这 100 object queries 经过Transformers decoder 之后会预测出若干类别的物体和位置信息.
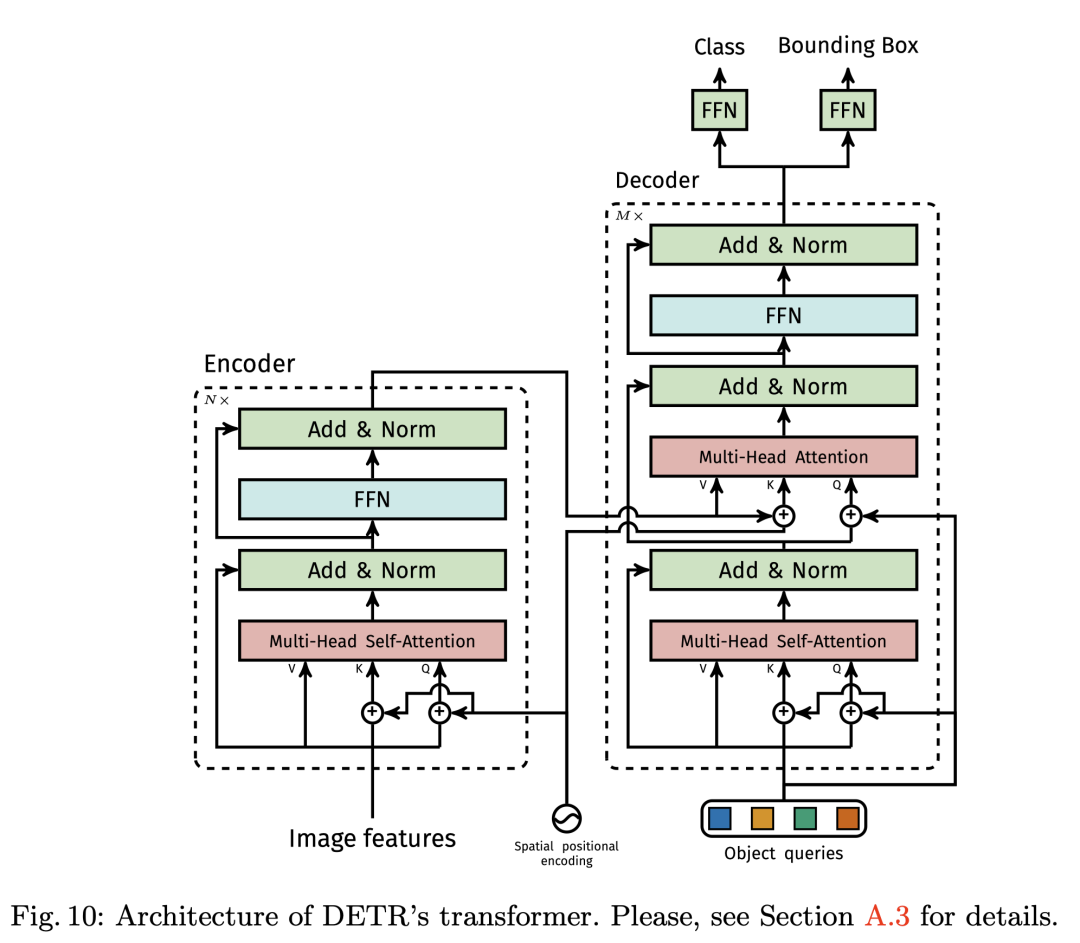
作者发现在训练过程中在decoder 中使用auxiliary losses很有帮助,特别是有助于模型输出正确数量的每个类的对象。
FFN
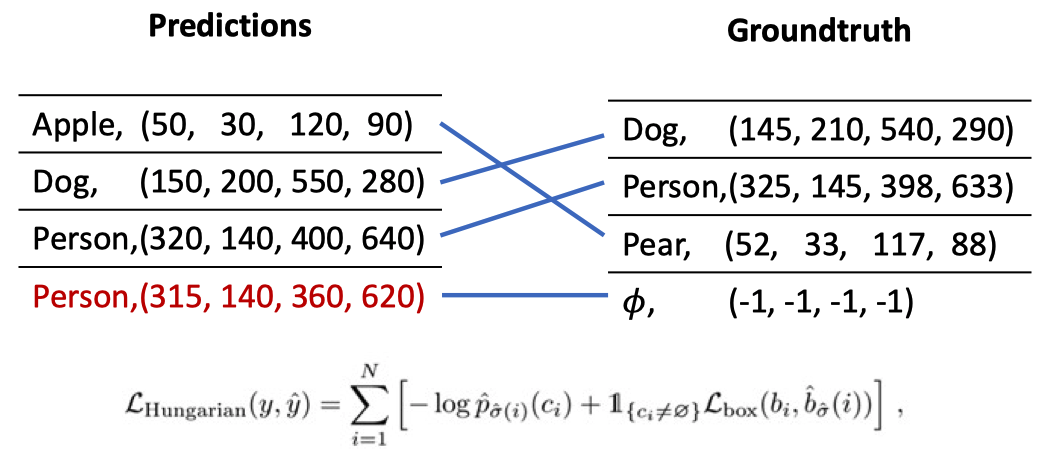
DETR在每个解码器层之后添加预测FFN和Hungarian loss,所有预测FFN共享其参数。我们使用附加的共享层范数来标准化来自不同解码器层的预测FFN的输入,FFN 是一个最简单的多层感知机模块,对 Transformers decoder 的输出预测每个 object query的类别和位置信息.在实际训练的过程中,通过匈牙利算法匹配预测和标签最小的损失,仅适用配对上的query 计算 loss回传梯度.
loss 包括 Box loss 和 class loss
Box Loss 包括 IOUloss 和 L1loss,这个原理很简单.
where are hyperparameters and is the generalized IoU [38]:
class loss就是最简单的交叉熵了.
匈牙利匹配
匈牙利匹配算法是离散数学中图论部分的一个经典算法,描述的问题是一个二分图的最大匹配.换成人话来说就是这个二分图分成两部分,一部分是我们对 100 种 object query 预测的结果,另一部分是实际的标签,由于我们一开始是不知道这100 个 object query 输入的时候应该预测那些类别的物体,有可能一开始第一个 token 预测的是 A 物体,第二个 token 预测的是 C 物体,总而言之是无序的,我们就要根据实际的 label,找到预测结果中和他最接近的计算 loss.其他没匹配上的则不计算 loss回传梯度.下面这张图一目了然:
通过对比 ViT 思考 DETR
其实笔者在阅读这篇文章的时候更加重点的是对比 ViT 在一些实现细节上的不同之处,
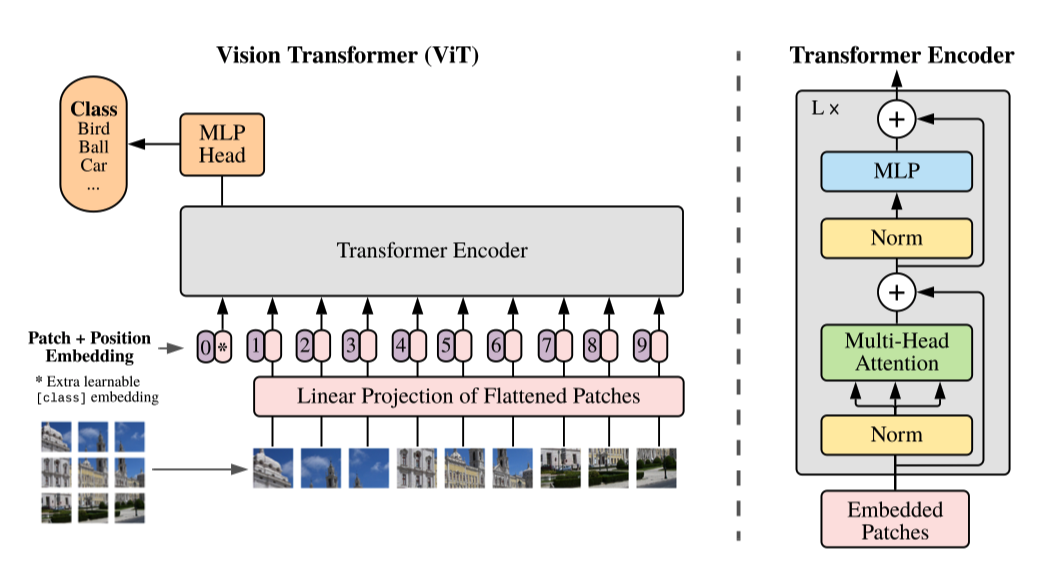
首先 ViT 是没有使用 CNN 的,而 DETR 是先用 CNN 提取了图像的特征 ViT 只使用了Transformers-encoder,在 encoder 的时候额外添加了一个 Class token 来预测图像类型,而 DETR 的 object token 则是通过 Decoder 学习的. DETR 和 VIT 中的Transformers 在 encoder 部分都使用了Position Embedding,但是使用的并不一样,而 VIT 在使用的 Position Embedding 也是笔者一开始阅读文献的疑惑所在. DETR 的 Transformers encoder使用的feature 的每一个pixel作为token embeddings输入,而ViT 则是直接把图像切成 16*16 个 Patch,每个 patch 直接拉平作为token embeddings 相比较 VIT,DETR 更接近原始的 Transformers 架构.
DETR 还能做分割
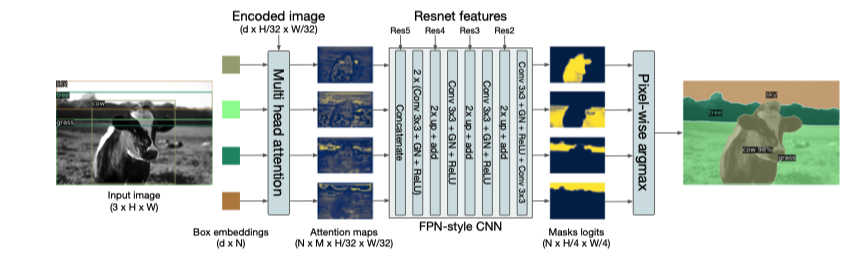
首先检测 box 对每个 box 做分割 为每个像素的类别投票
作者在这篇论文在并没有详细讲实现细节,但是今年 CVPR2021 上发表的 SETR 则是重点讲如何利用 Transformers 做分割,我们下次细讲.
实验结果分析
Comparison Study
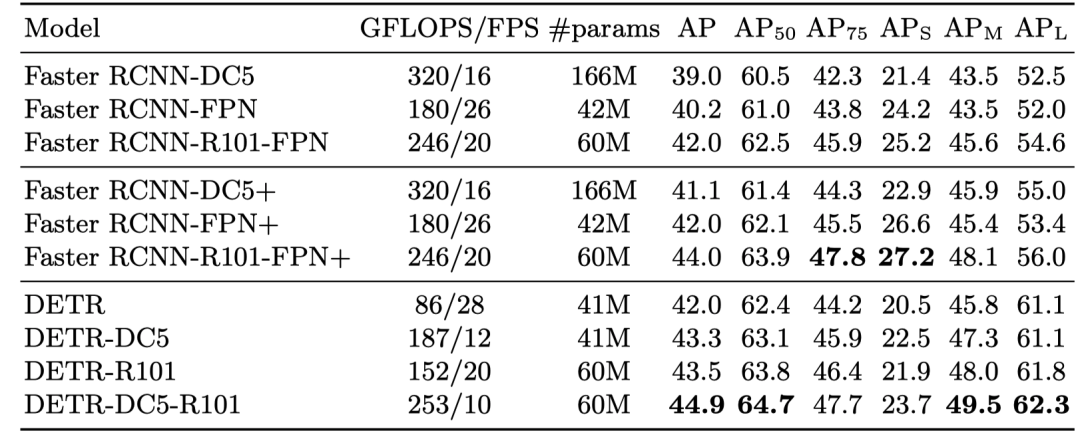
对比的是检测领域最经典的 Faster R-CNN,可以看得出来了在同等参数两的情况下,在大目标物体的检测结果优于 Faster R-CNN,道理嘛作者说是 Transformers 可以更关注全局信息.
Ablation Study

Decoder 比 Encoder 重要 Decoder具有隐含的“锚”,这对检测至关重要 Encoder仅帮助聚合同一对象的像素,减轻decoder 的负担
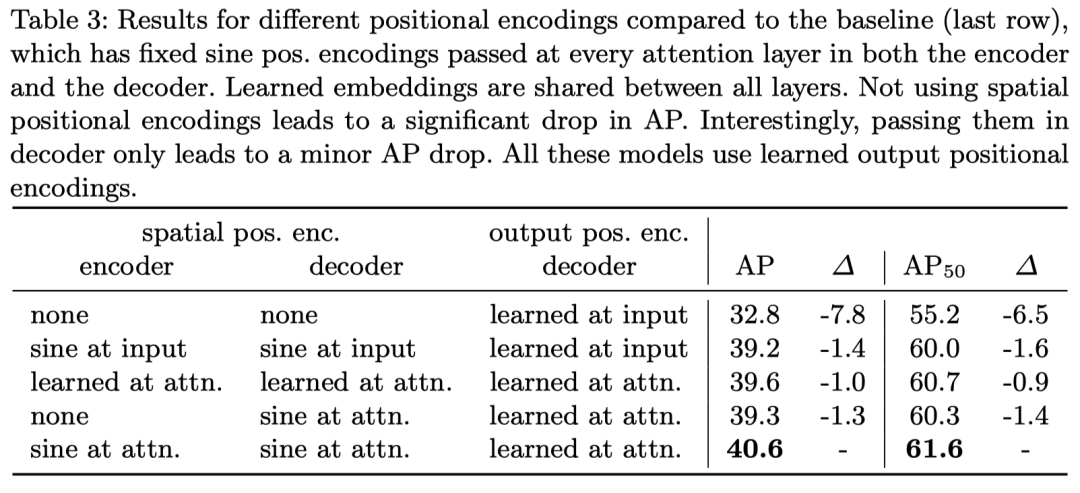
在位置编码部分,作者对比了可学习的位置编码和基于 Sincos 函数的位置编码方法(也就是原始 Transformers 的位置编码方法)可以看得出来效果是 Sincos 的更好,但是都显著好于不加位置编码,因为作者也在原文中Self-Attention 是并行的,他如果不加位置编码的话是置换不变性的(这个看 Attention is All you Need 原文)
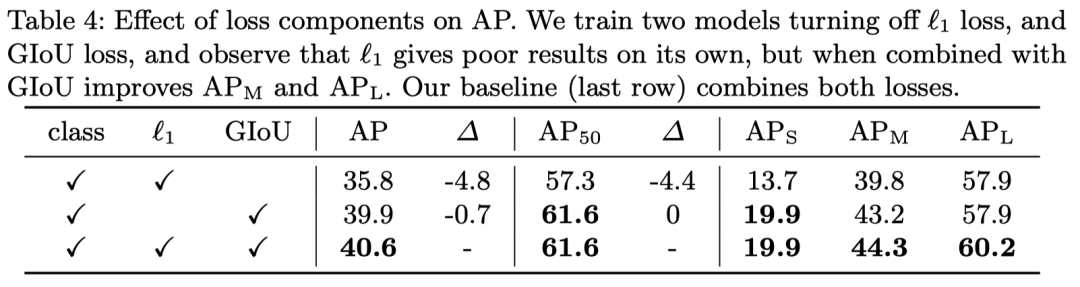
这个嘛,就是很简单的实验了,验证一下 loss 每个部分的作用,基本上就是格式化的东西.
简易代码
作者最后在附录部分贴上了简易的代码实现细节
import torch
from torch
import nn
from torchvision.models import resnet50
class DETR(nn.Module):
def __init__(self, num_classes, hidden_dim, nheads,
num_encoder_layers, num_decoder_layers):
super().__init__()
# We take only convolutional layers from ResNet-50 model
self.backbone=nn.Sequential(
*list(resnet50(pretrained=True).children())[:-2])
self.conv = nn.Conv2d(2048, hidden_dim, 1)
self.transformer = nn.Transformer(hidden_dim, nheads,
num_encoder_layers,
num_decoder_layers)
self.linear_class = nn.Linear(hidden_dim, num_classes + 1)
self.linear_bbox = nn.Linear(hidden_dim, 4)
self.query_pos =nn.Parameter(torch.rand(100, hidden_dim))
self.row_embed = nn.Parameter(torch.rand(50, hidden_dim // 2))
self.col_embed = nn.Parameter(torch.rand(50, hidden_dim // 2))
def forward(self, inputs):
x = self.backbone(inputs) h = self.conv(x)
H,W=h.shape[-2:]
pos = torch.cat([
self.col_embed[:W].unsqueeze(0).repeat(H, 1, 1),
self.row_embed[:H].unsqueeze(1).repeat(1, W, 1), ],
dim=-1).flatten(0, 1).unsqueeze(1)
h = self.transformer(pos +
h.flatten(2).permute(2, 0,1),
self.query_pos.unsqueeze(1))
return self.linear_class(h), self.linear_bbox(h).sigmoid()
detr = DETR(num_classes=91, hidden_dim=256, nheads=8, num_encoder_layers=6, num_decoder_layers=6)
detr.eval()
inputs = torch.randn(1, 3, 800, 1200)
logits, bboxes = detr(inputs)
结论
一篇很简单的 Transformers 在目标检测上的应用,也是最近大火的 Transformers 系列必引的一篇论文,我觉得他和 VIT 代表了 CV 对 Transformers 架构的两种看法吧,VIT 是只用 Encoder,这也是目前最主流的做法,而 DETR 则是运用了 CNN 和 Transformers encoder-decoder 的结合,从 motivation 上来说我个人更喜欢 DETR,这段时间也基本上把 Transformers 一系列都读完了,会以一个系列调几篇好的论文讲解(水文实在是太多了)。
推荐阅读
谷歌提出Meta Pseudo Labels,刷新ImageNet上的SOTA!
"未来"的经典之作ViT:transformer is all you need!
涨点神器FixRes:两次超越ImageNet数据集上的SOTA
CondInst:性能和速度均超越Mask RCNN的实例分割模型
mmdetection最小复刻版(十一):概率Anchor分配机制PAA深入分析
MMDetection新版本V2.7发布,支持DETR,还有YOLOV4在路上!
无需tricks,知识蒸馏提升ResNet50在ImageNet上准确度至80%+
不妨试试MoCo,来替换ImageNet上pretrain模型!
mmdetection最小复刻版(七):anchor-base和anchor-free差异分析
mmdetection最小复刻版(四):独家yolo转化内幕
机器学习算法工程师
一个用心的公众号
