
一文详解双目相机标定理论
01 前言
两台相机各自误差的标定(单目标定) 两台相机之间相互位置的标定(狭义,双目标定)
这是因为在许多三维重建算法中,我们都要知道两台相机之间的相对位置关系,这样才能进行距离计算。
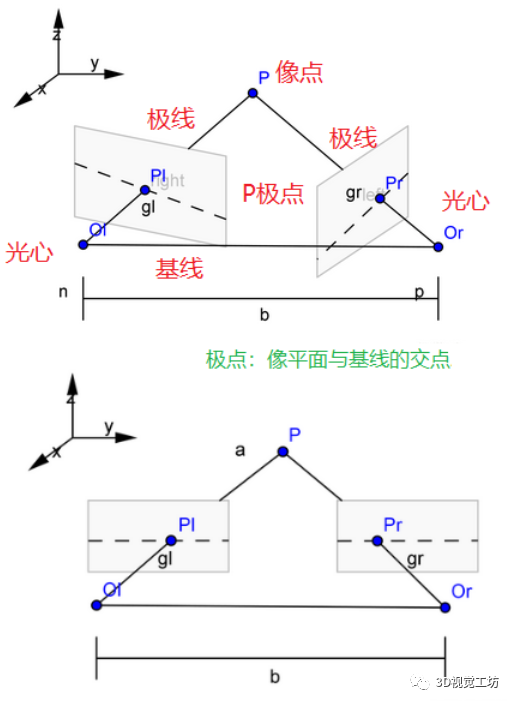
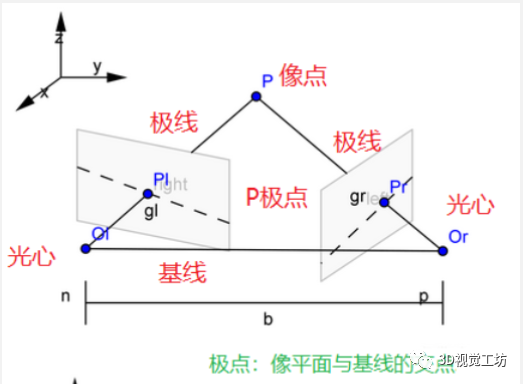
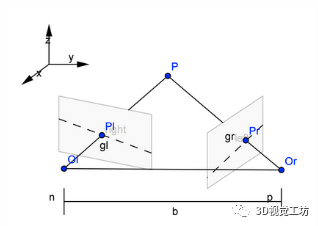
基线:两个光心的连线称为基线; 极平面:物点(空间点M)与两个光心的连线构成的平面称为极平面; 极线:极平面与成像平面的交线 极点:极线的一端,基线与像平面的交点 像点:极线的一端,光心与物点连线与像平面的交点;
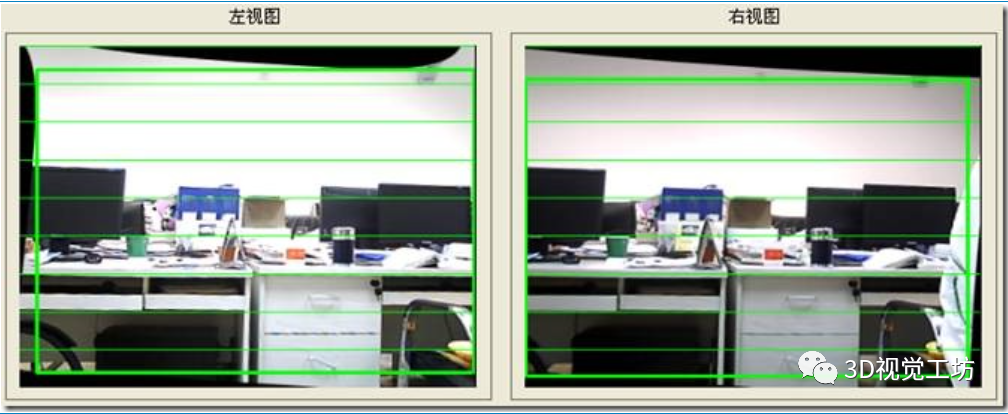
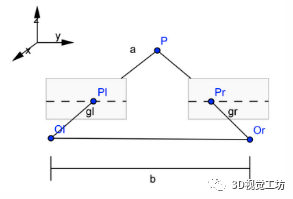
校正前,相机的光心不是相互平行的 校正后,极点在无穷远处,两个相机的光轴平行,像点在左右图像上的高度一致
注:可以看出来,最重要的,我们要知道右相机相对于左相机的位姿关系,那我们才可以做校正!
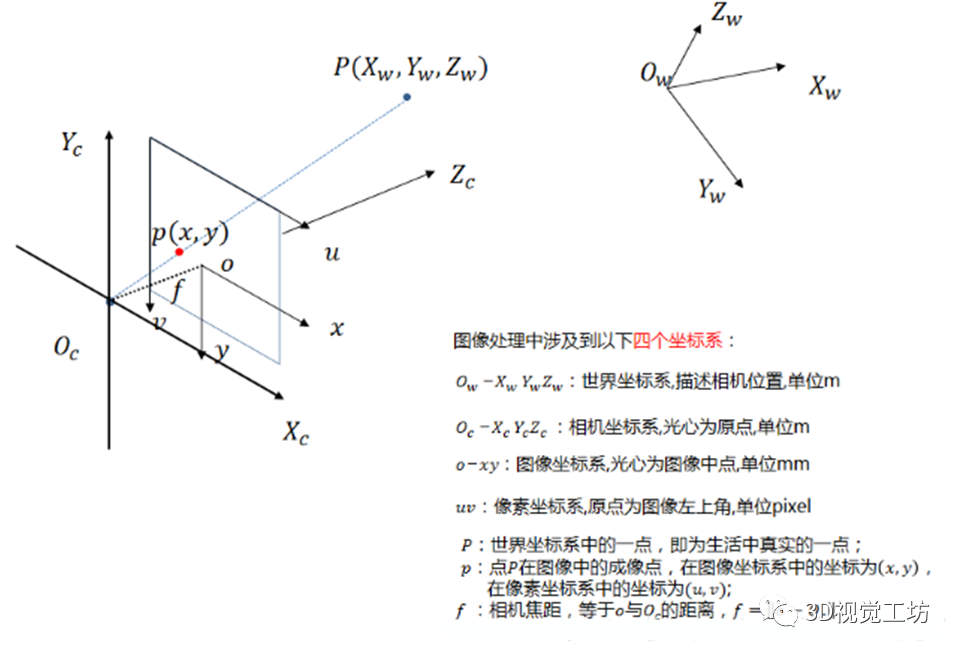
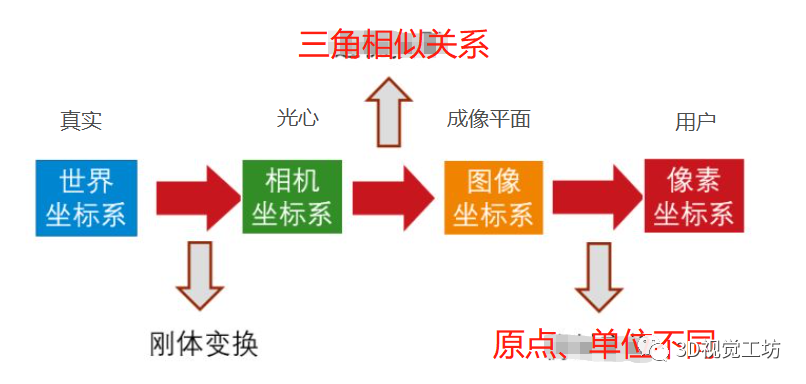
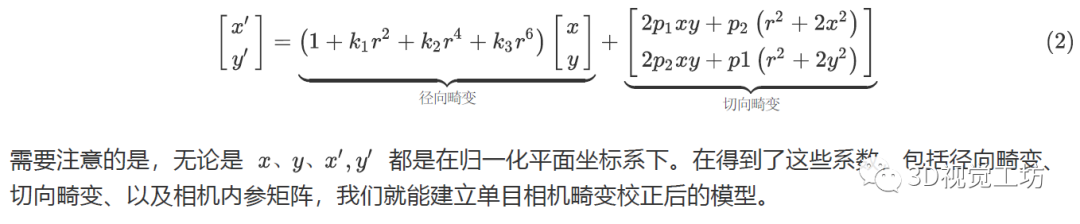
02 单目理论回顾

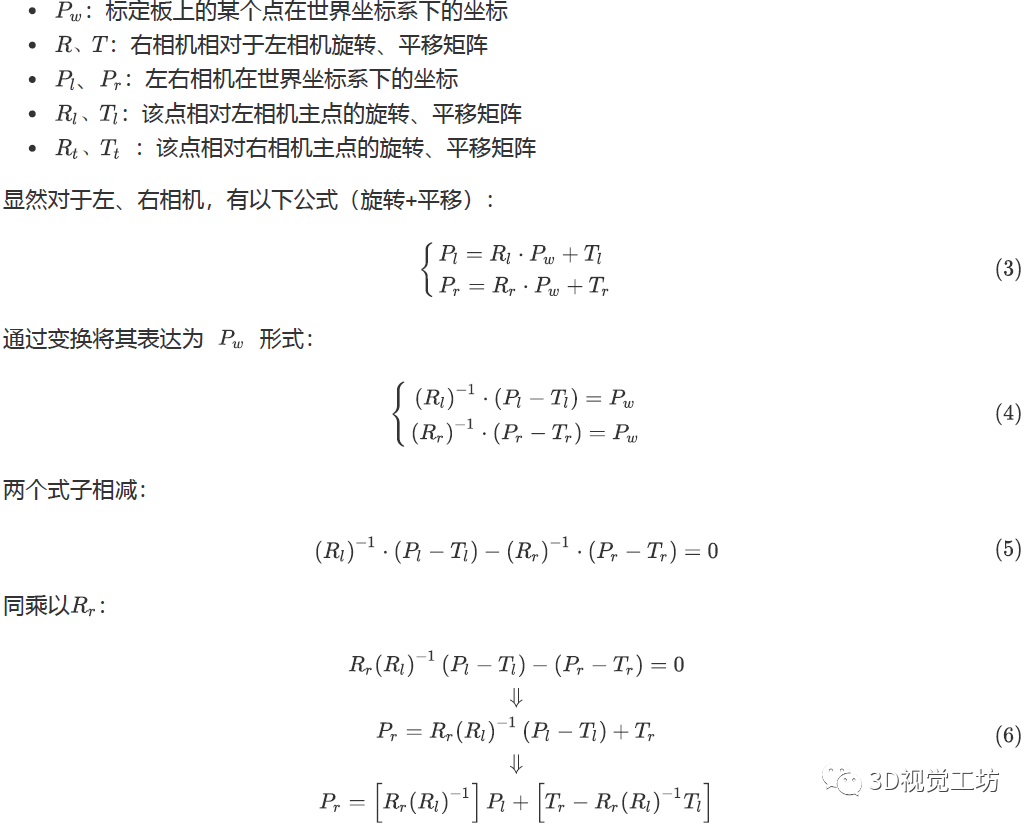
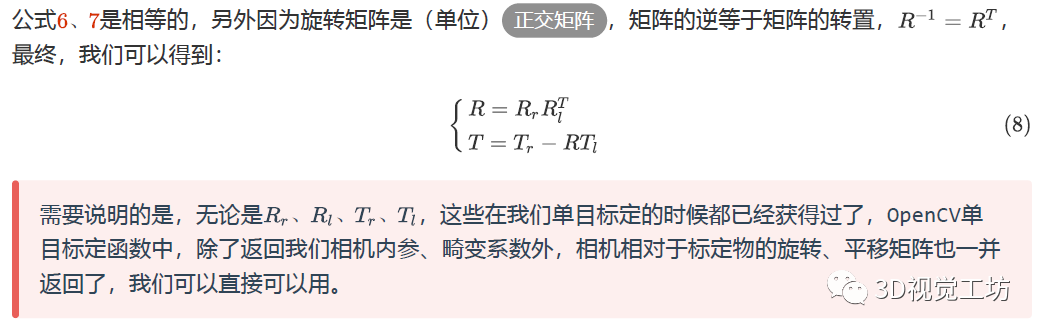
03 双目标定公式推导

04 极线校正理论推导
 |  |
左相机不动,右相机动。 也可以两部相机旋转到中间等等。
Bouguet极线校正方法:左右相机成像平面各旋转一半,使得左右图像重投影造成的误差最小,左右视图的共同面积最大。
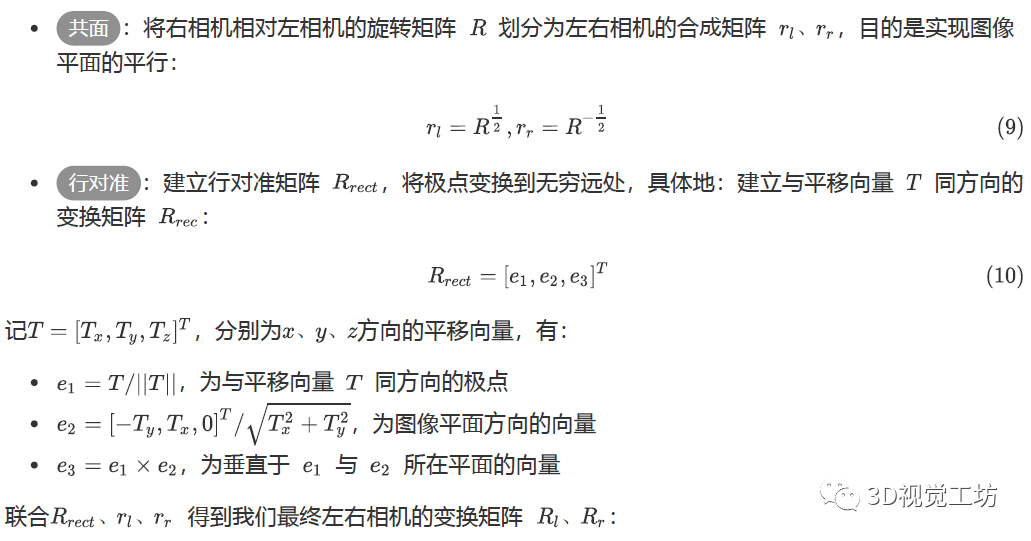

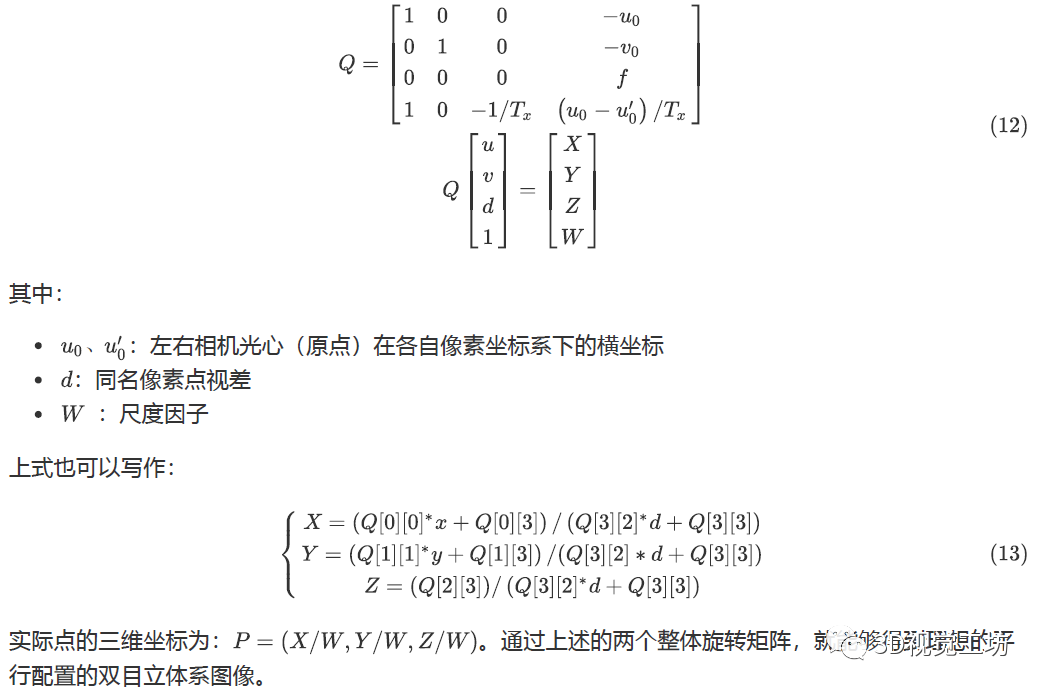
得到这两个变换矩阵,左、右相机分别乘以这两个矩阵即可完成变换,其中已经包含了平移信息!
 |
05 参考文献
—版权声明—
来源:计算机视觉工坊
仅用于学术分享,版权属于原作者。
若有侵权,请联系微信号:yiyang-sy 删除或修改!
评论