
OpenCV中的透视变换介绍
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

本文转自:opencv学堂
透视变换是将图像从一个视平面投影到另外一个视平面的过程,所以透视变换也被称为投影映射(Projection Mapping)。我们知道在图像的仿射变换中需要变换矩阵是一个2x3的两维平面变换矩阵,而透视变换本质上空间立体三维变换,根据其次坐标方差,要把三维坐标投影到另外一个视平面,就需要一个完全不同的变换矩阵M,所以这个是透视变换跟OpenCV中几何仿射变换最大的不同。
OpenCV中透视变换的又分为两种:
- 密集透视变换
- 稀疏透视变换
我们经常提到的对图像的透视变换都是指密集透视变换,而稀疏透视变换在OpenCV的特征点匹配之后的特征对象区域标识中经常用到。一般情况下密集透视变换warpPerspective函数常与函数getPerspectiveTransform一起使用实现对图像的透视校正。而稀疏透视变换perspectiveTransform经常与findhomography一起使用。
warpPerspective - 实现图像透视变换
-src
参数表示输入图像
-dst
参数表示输出图像
-M
参数表示透视变换矩阵(3x3)
-dsize
参数表示输出图像大小
-flags
参数表示插值方法,一般为线性或者最近邻插值
-borderMode
参数表示对边缘的处理方法,有默认值
一般不用设。
-borderValue
参数表示边缘的填充演示,默认是黑色
getPerspectiveTransform - 获取透视变换矩阵
-src
参数表示输入透视变换前图像四点坐标
-dst
参数表示输入透视变换后图像四点坐标
返回值类型Mat
该函数返回透视变换矩阵M大小为3x3
限于篇幅,我们这里只会演示图像透视变换,至于稀疏透视变换相关API演示以后会单独写一篇文章介绍,运行效果如下
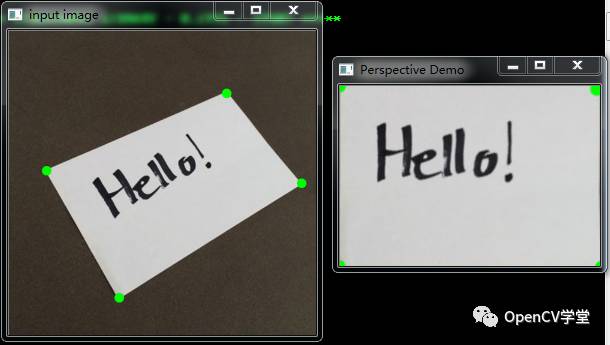
左边是原图,右边是透视校正之后的图像。
相关代码如下:
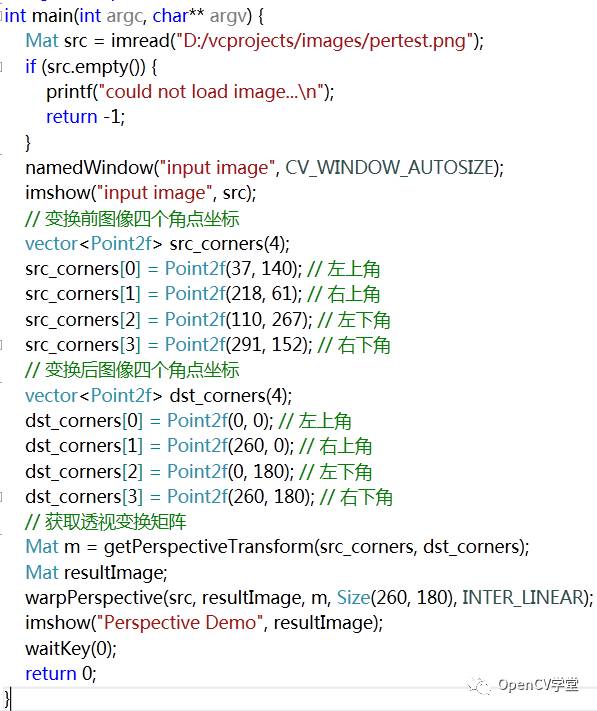
主要根据输入的坐标点获取透视变换矩阵,然后利用透视变换矩阵实现图像透视校正,这个在实际工作中非常有用!
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~