
多目标追踪小抄:快速了解MOT的基本概念

来源:Deephub Imba 本文共2400字,建议阅读5分钟 本文介绍了MOT的基本概念。
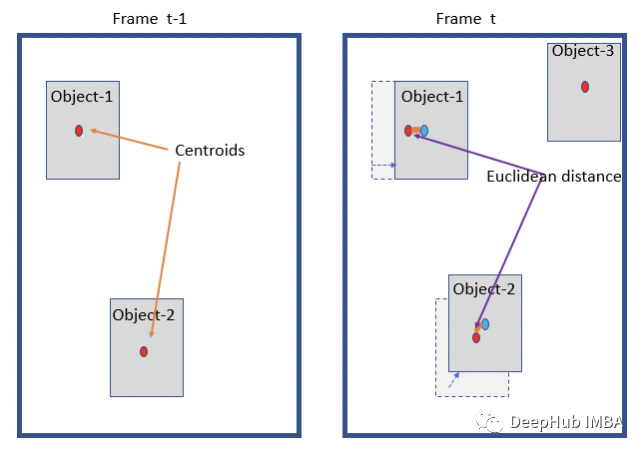
多目标跟踪(Multiple Object Tracking)
检测每帧中存在哪些对象 标注对象在每一帧中的位置 关联不同帧中的对象是属于同一个对象还是属于不同对象
MOT的典型应用
用于交通控制、数字取证的视频监控 手势识别 机器人技术 增强现实 自动驾驶
MOT 面临的挑战
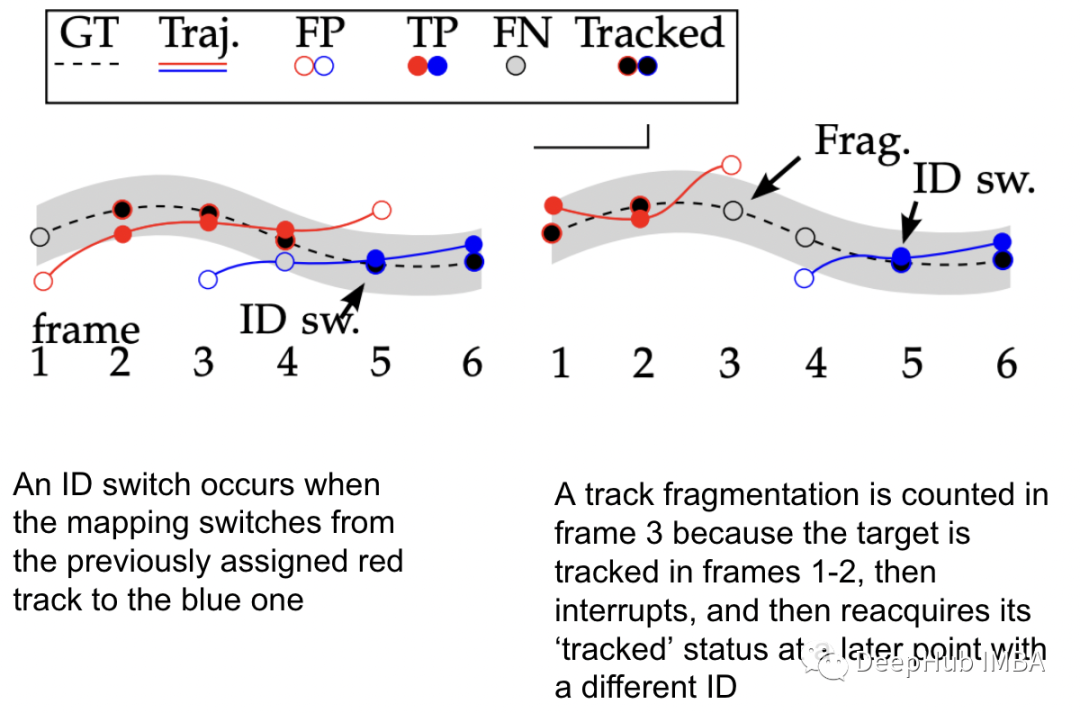
ID Switching发生在两个相似的物体重叠或混合时,导致身份切换;因此,很难跟踪对象 ID。 背景失真:复杂的背景使得在物体检测过程中难以检测到小物体 遮挡:对象被另一个对象隐藏或遮挡时会产生这个问题。 多个空间空间、变形或对象旋转 由于运动模糊而在相机上捕获的视觉条纹或拖尾
一个好的多目标跟踪器(MOT)
通过在每帧的精确位置识别正确数量的跟踪器来跟踪对象。 通过长期一致地跟踪单个对象来识别对象, 尽管有遮挡、照明变化、背景、运动模糊等,仍可跟踪对象。 快速检测和跟踪物体
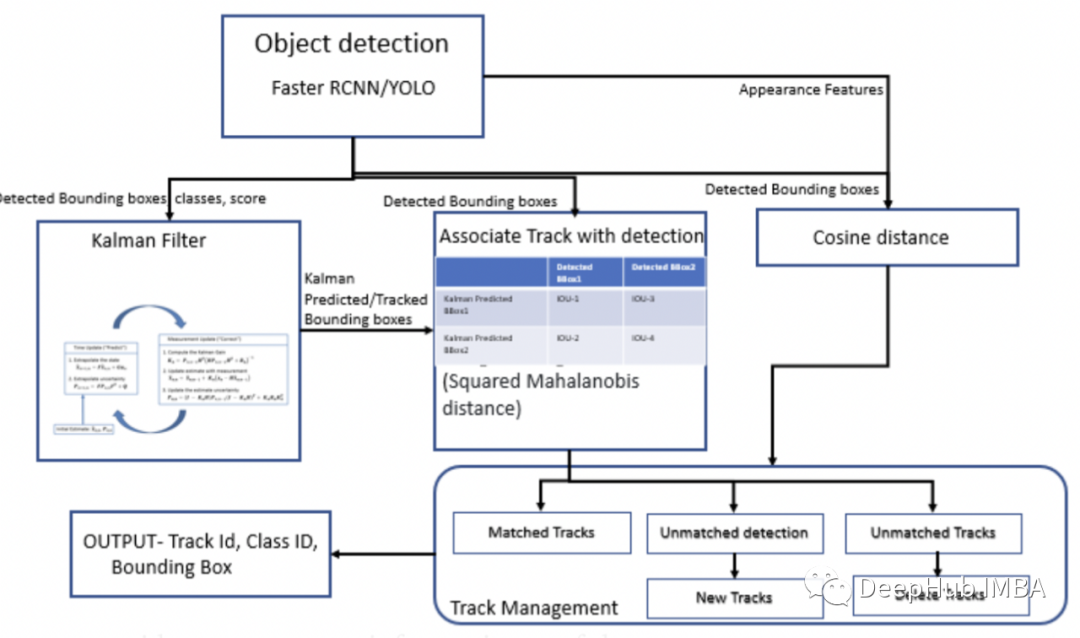
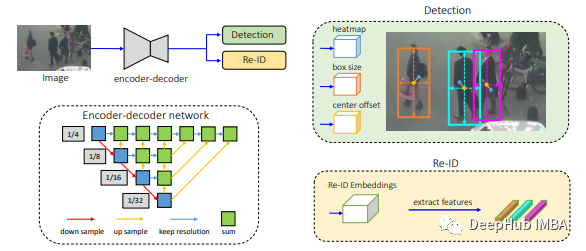
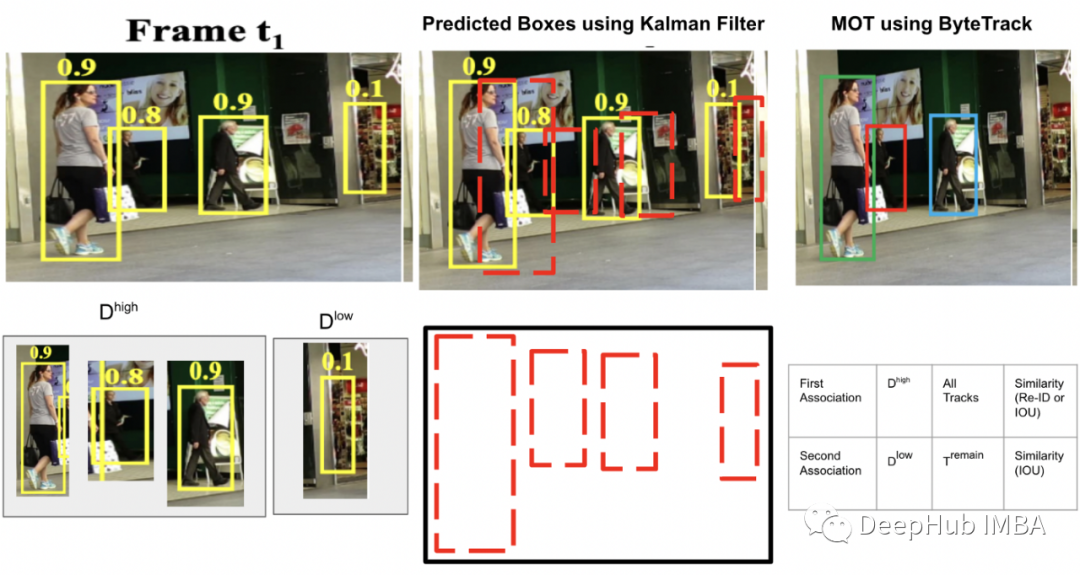
常见的 MOT 算法
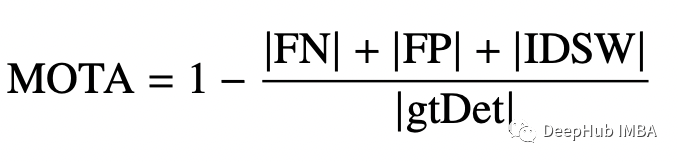
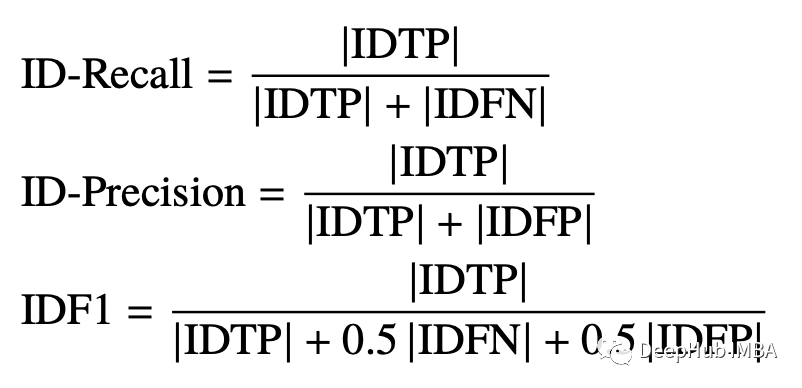
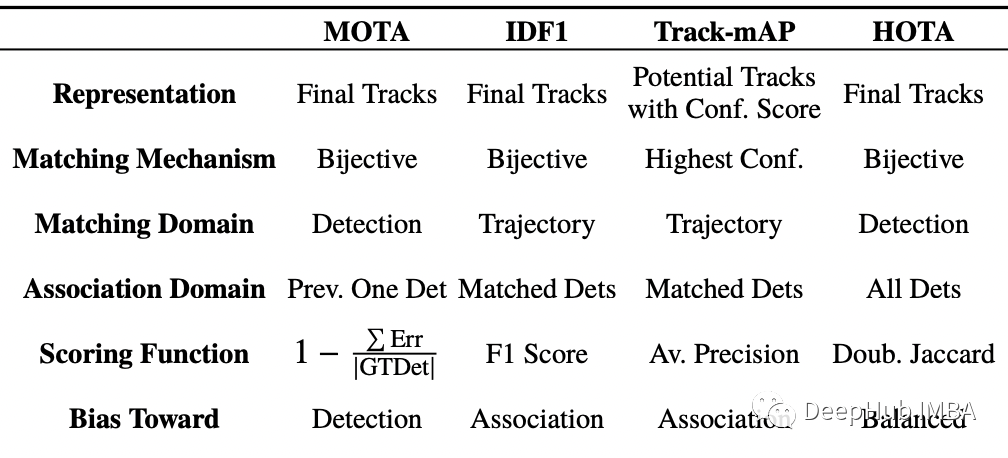
MOT评估指标
常用的MOT评估指标
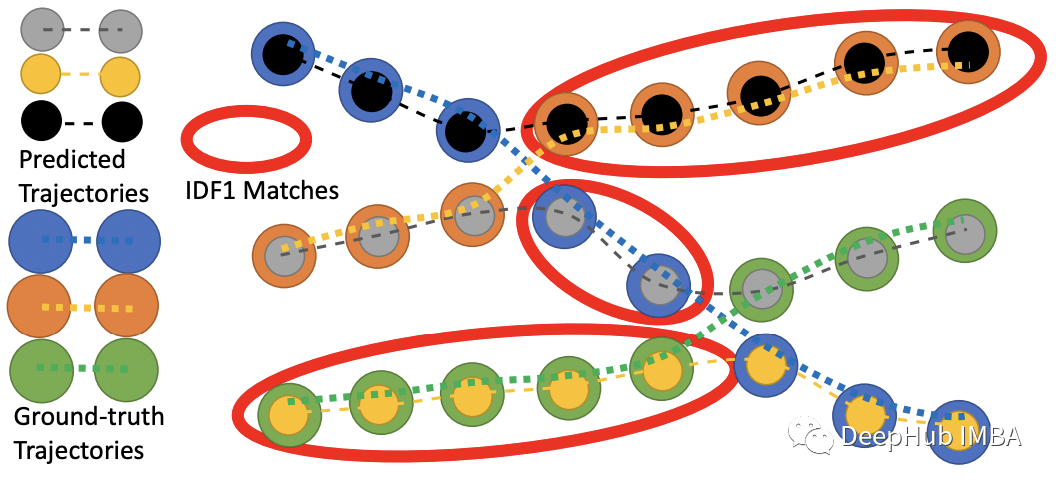
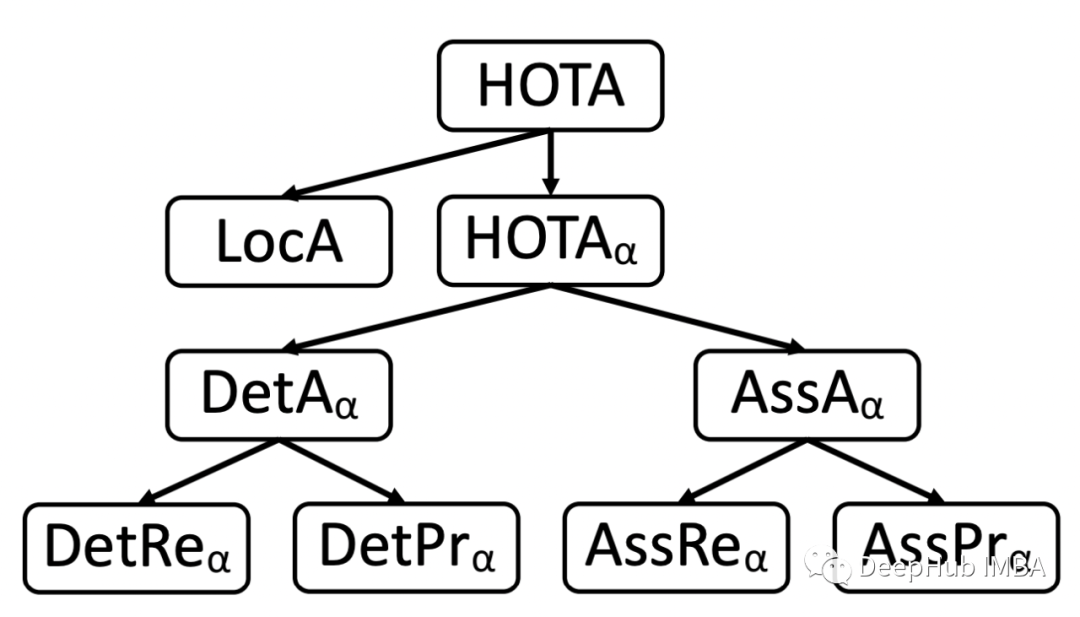
HOTA:高阶跟踪精度
当跟踪器预测到不存在的检测或未能预测目标的检测时,就会发生检测错误。检测误差可以进一步分为检测召回率(由 FNs 衡量)和检测精度(由 FPs 衡量) 当跟踪器将相同的 prID 分配给具有不同 gtID 的两个检测或将不同的 prID 分配给应该具有相同 gtID 的两个检测时,会发生关联错误。关联误差进一步分为关联召回误差(由 FNA 测量)和关联精度(由 FPA 测量) 当 prDets 在空间上与 gtDets 不完全对齐时,就会发生定位错误。
评论