
图解大模型训练之:Megatron源码解读2,模型并行
源码解读系列将和大家一起来读Megatron的pretrain部分代码。
在源码解读第一篇中,我们讲解了如何做「分布式环境初始化」,即按照DP/TP/PP对进程进行分组,并为每个进程指定GPU。在这一章中,我们将一起读「模型并行部分」:如何切分模型,并搬入分布式环境定义好的DP/TP/PP组中。
「本文将提供:」
详细的图解。画图说明代码的设计架构,讲清代码想做一件什么事。 详细的代码注释。在图解的基础上,提取核心代码部分,并附上注释。
「如何利用本文提高源码阅读效率:」
先看一~三部分。了解模型并行的设计思想、整体框架及入口函数。 打开Megatron源码,找到入口函数,开始阅读。 阅读中的每一块细节,可参考四~八部分。
「阅读本文前置知识:」
「本文目录:」
一、模型概述
二、模型切割在做一件什么事
2.1 模型切割设计思想 2.2 随机种子
三、模型并行框架
3.1 模型并行入口函数 3.2 定义并搬运模型 3.3 分布式模型:CodeGeeX
四、MegatronModule
五、Emebdding
六、VocabParallelEmebdding
七、ParallelSelfAttention:分布式block的一般套路
7.1 列切割:ColumnParallelLinear 7.2 行切割:RowParallelLinear 7.3 ParallelSelfAttention
八、CrossEntropy
8.1 计算logit 8.2 计算交叉熵
九、筋疲力尽的总结
十、参考(本文相关源码与论文)
一、模型概述
前文说过,用Megatron做分布式训练的开源大模型有很多,我们选用的是THUDM开源的CodeGeeX(代码生成式大模型,类比于openAI Codex)。选用它的原因是“完全开源”与“清晰的模型架构和预训练配置图”,能帮助我们高效阅读源码。我们再来回顾下这两张图。
「模型架构」
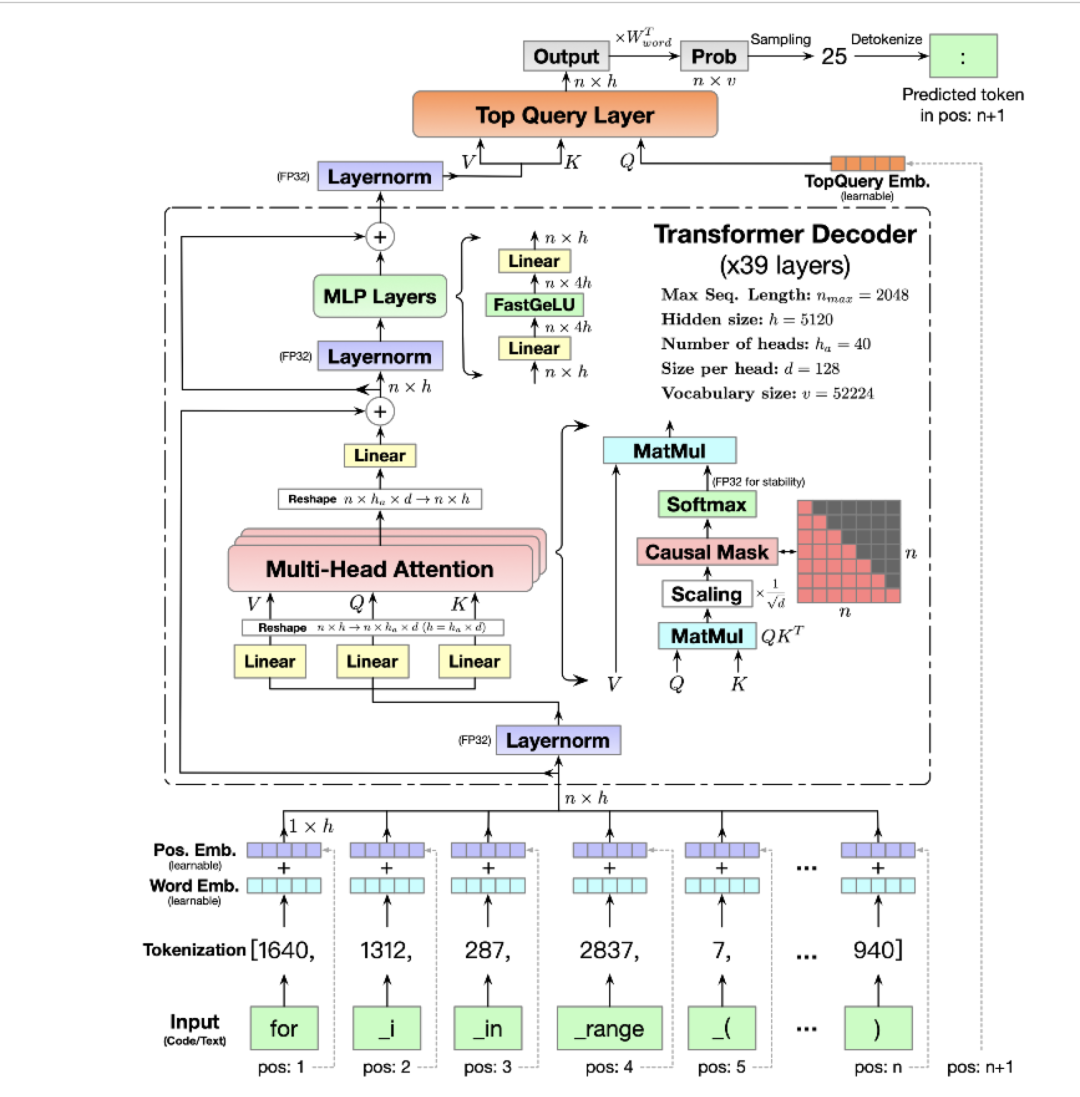
「预训练配置」
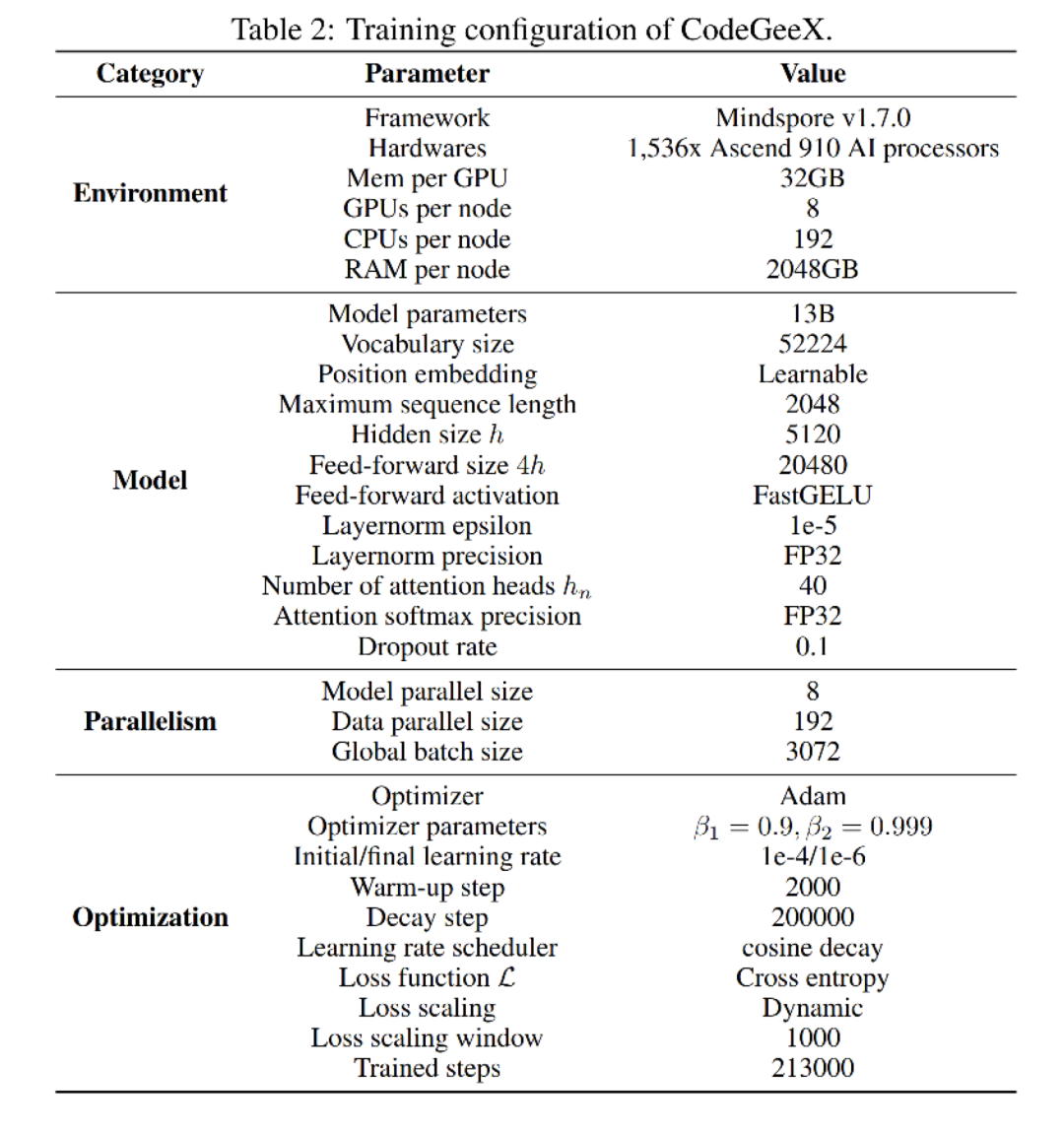
由图可知,CodeGeeX在预训练中采用的是8头TP(同一个node内的8张卡做TP,8张卡组成一个完整的模型),192头DP(192个node间做DP),一共1536块GPU进行训练。
「【阅读提醒】:如果你对GPT模型比较熟悉,则不需要花时间细看CodeGeeX架构图也能无障碍阅读本文。架构图只是在涉及模型细节时,可以对照着看。」
二、模型切割在做一件什么事
2.1 模型切割设计思想
回顾一下,在初始化分布式环境中,我们根据DP/TP/PP组设置并划分了进程,确定了模型的切割方法,如下图: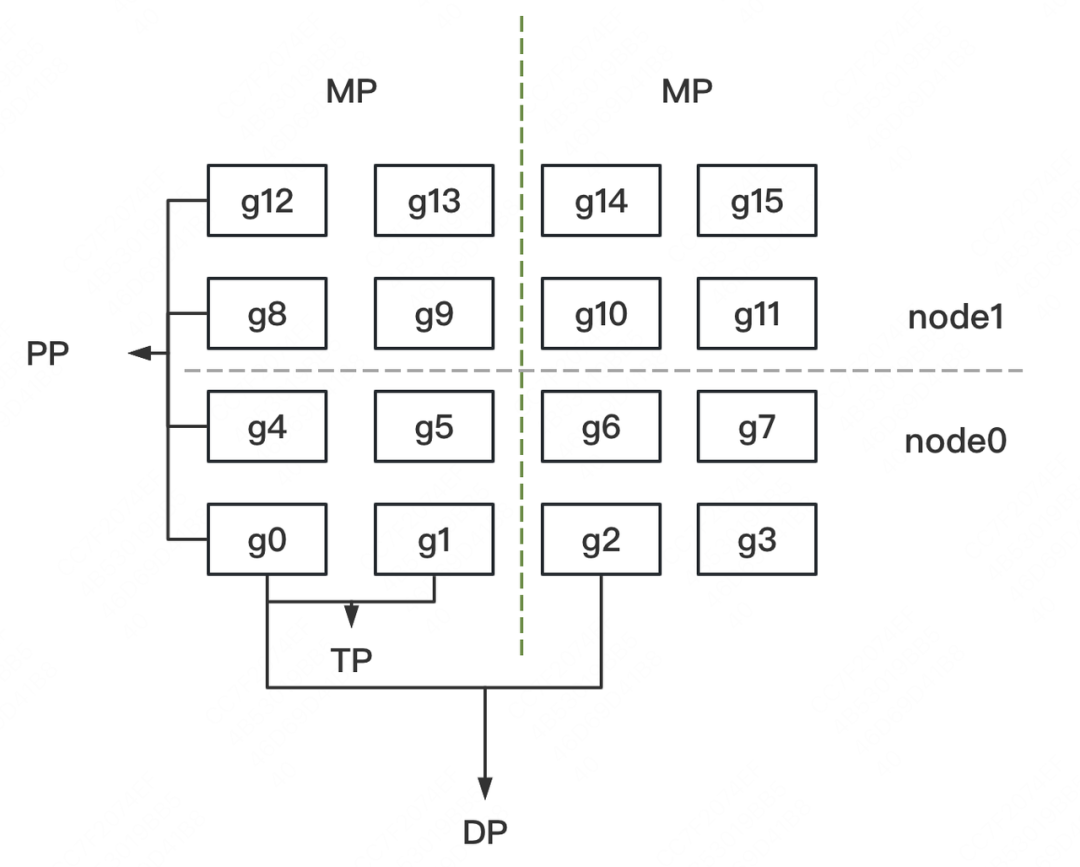 (注意:这并不是CodeGeeX的划分框架,而是一个更广义的例子,细节可阅读上篇讲解)
(注意:这并不是CodeGeeX的划分框架,而是一个更广义的例子,细节可阅读上篇讲解)
接下来,我们就可以根据这个框架来切割模型了。pytorch默认将模型(nn.Module)定义在CPU上,因此,我们在CPU上定义并初始化模型,然后将其搬运到当前进程所对应的GPU上,整个过程如下图: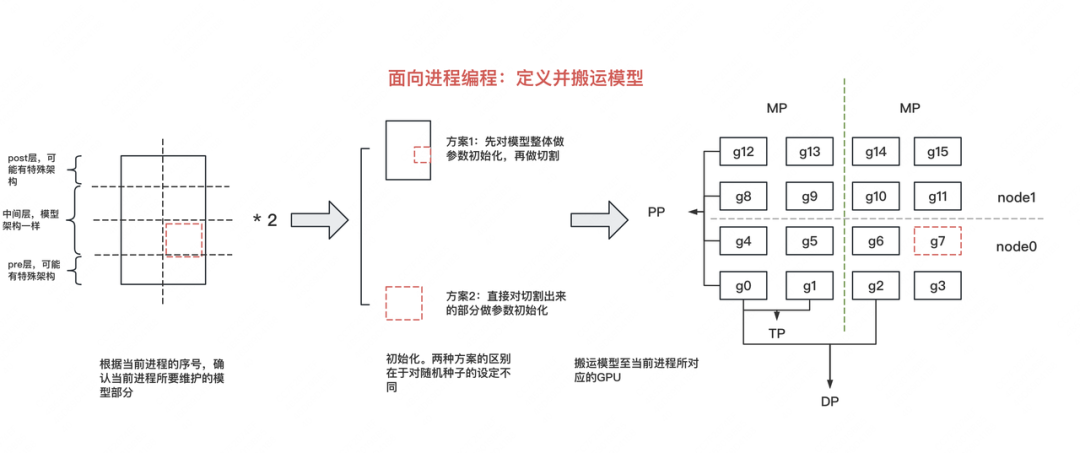 首先,我们是面向进程编程的,也就是整份脚本处理的是发生在1个进程上的事情。这样做的好处是,我们只需要维护1份脚本,然后将其发去不同机器的各张卡上执行,就能实现全局的并行。
首先,我们是面向进程编程的,也就是整份脚本处理的是发生在1个进程上的事情。这样做的好处是,我们只需要维护1份脚本,然后将其发去不同机器的各张卡上执行,就能实现全局的并行。
但是,1个进程处理的是模型的不同部分,比如GPT模型,它的pre层涉及到Embedding计算,post层涉及到softmax和loss的计算,这样每个进程上处理的模型是不一样的,这时怎么办呢?别忘了,我们能够取到进程id(全局或DP/TP/PP组内的),这样我们就能通过进程id,写if...else...来解决模型差异化问题了。
明确了这个思想,现在我们可以开始写代码了,我们有两种方式对模型进行切割:
「方案一:」先定义出完整的模型,并对模型参数做初始化,然后根据进程id取出相应子模型,搬运到GPU上 「方案二:」直接根据进程id,设计好当前子模型,做参数初始化,搬运到GPU上
这两者的核心差别,在于“随机种子”的设定。
2.2 随机种子
在分布式训练中,「随机种子是非常重要的,它关系到模型是否能够复现」。例如我们采取activation checkpoint的技术来节省显存时,在backward过程中我们需要重算forward得到activation,这时候就需要我们完整复现之前forward的过程,各类参数的初始化结果也要和之前完全一致。
我们来看几个例子:
例1: Word Embedding
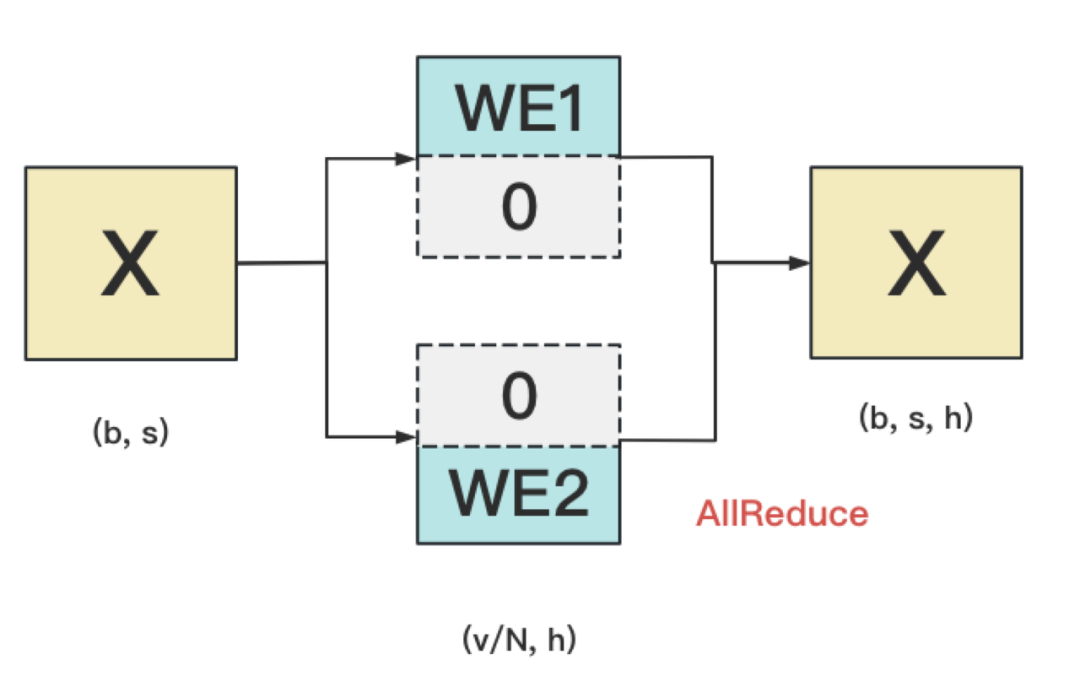 WE1和WE2间需要采用不同的随机种子。因为若采用相同的随机种子,则WE1和WE2的结果完全一样,这不等价于先随机初始化WE,再将它进行切割。
WE1和WE2间需要采用不同的随机种子。因为若采用相同的随机种子,则WE1和WE2的结果完全一样,这不等价于先随机初始化WE,再将它进行切割。
例2: dropout
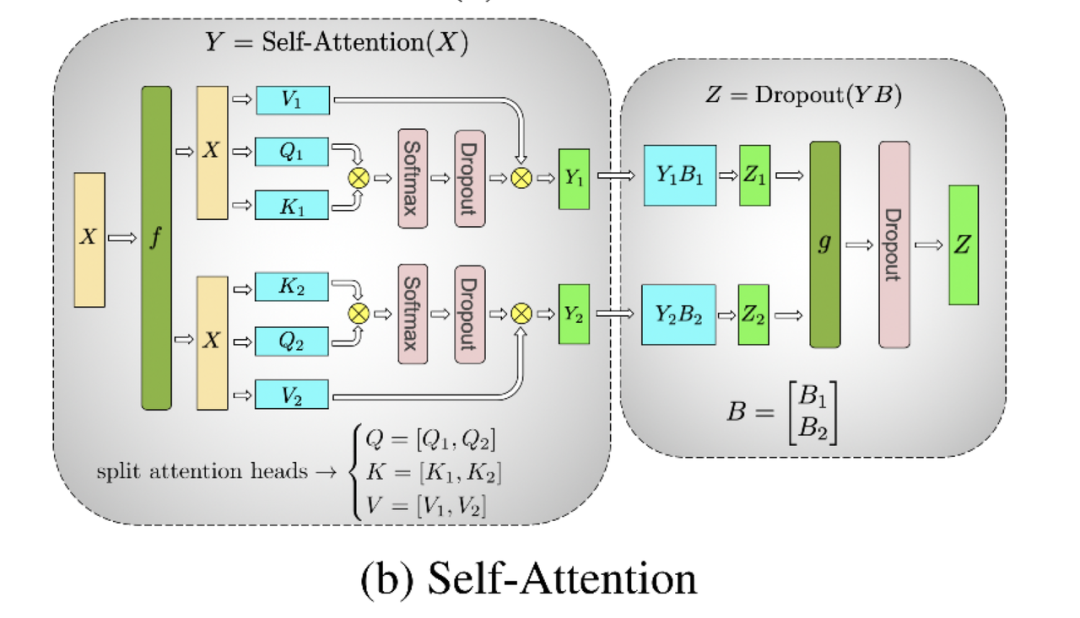 左侧方框中的2个dropout,在初始化时需要用不同的随机种子。因为这样才等价于对完整的dropout做初始化,然后再切割。右侧方框中的dropout,需要用相同的随机种子(虽然右边只画了1个dropout,但其实是2个dropout,每块GPU上各一个,因为此时两块GPU上的输出已经AllReduce,是完全一致的。做完AllReduce后,两块GPU继续独立计算,因此实际上有两个dropout)。
左侧方框中的2个dropout,在初始化时需要用不同的随机种子。因为这样才等价于对完整的dropout做初始化,然后再切割。右侧方框中的dropout,需要用相同的随机种子(虽然右边只画了1个dropout,但其实是2个dropout,每块GPU上各一个,因为此时两块GPU上的输出已经AllReduce,是完全一致的。做完AllReduce后,两块GPU继续独立计算,因此实际上有两个dropout)。
关于随机种子设定的一般结论
从例子中,我们可以得出一个结论:「一般在TP/PP组内,设定不同的随机种子。而在DP组内,设定相同的随机种子。」 这只是一个一般结论,我们可以根据实际情况去调整。
最后,回到模型切割上,方案1(先做整体初始化再切割)在代码里被称为“CPU上的初始化”(_initialize_affine_weight_cpu),方案2(直接对局部初始化)被称为“在GPU上的初始化”(_initialize_affine_weight_gpu)。我们会在切割部分的代码里经常看见它们。
三、模型并行框架
现在,我们可以来看具体的代码了
3.1 模型并行入口函数
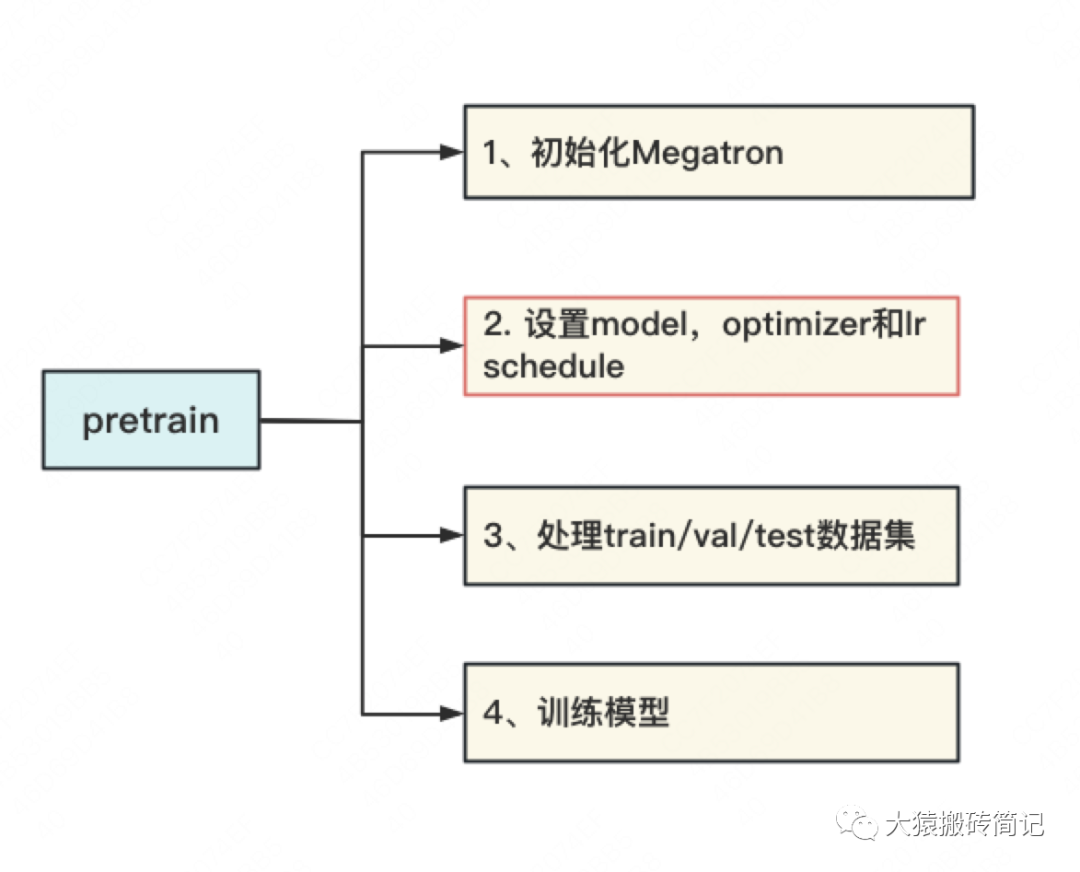
模型并行部分的代码入口依然在megatron/training.py的pretrain函数下,代码如下:
def pretrain(
train_valid_test_dataset_provider,
model_provider,
forward_step_func,
valid_forward_step_func=None,
extra_args_provider=None,
args_defaults={},
):
# 1.初始化分布式环境(源码解读1内容)
initialize_megatron(
extra_args_provider=extra_args_provider, args_defaults=args_defaults
)
...
# 2、模型并行:定义模型架构,并切割模型(本文重点)
model, optimizer, lr_scheduler = setup_model_and_optimizer(model_provider)
...
# 3、构造train/val/test数据集(下一篇将讲述)
... (
train_data_iterator,
valid_data_iterator,
test_data_iterator,
) = build_train_valid_test_data_iterators(train_valid_test_dataset_provider)
...
# 4、训练(下下一篇将讲述)
iteration = train(
forward_step_func,
valid_forward_step_func,
model,
optimizer,
lr_scheduler,
train_data_iterator,
valid_data_iterator,
)
...
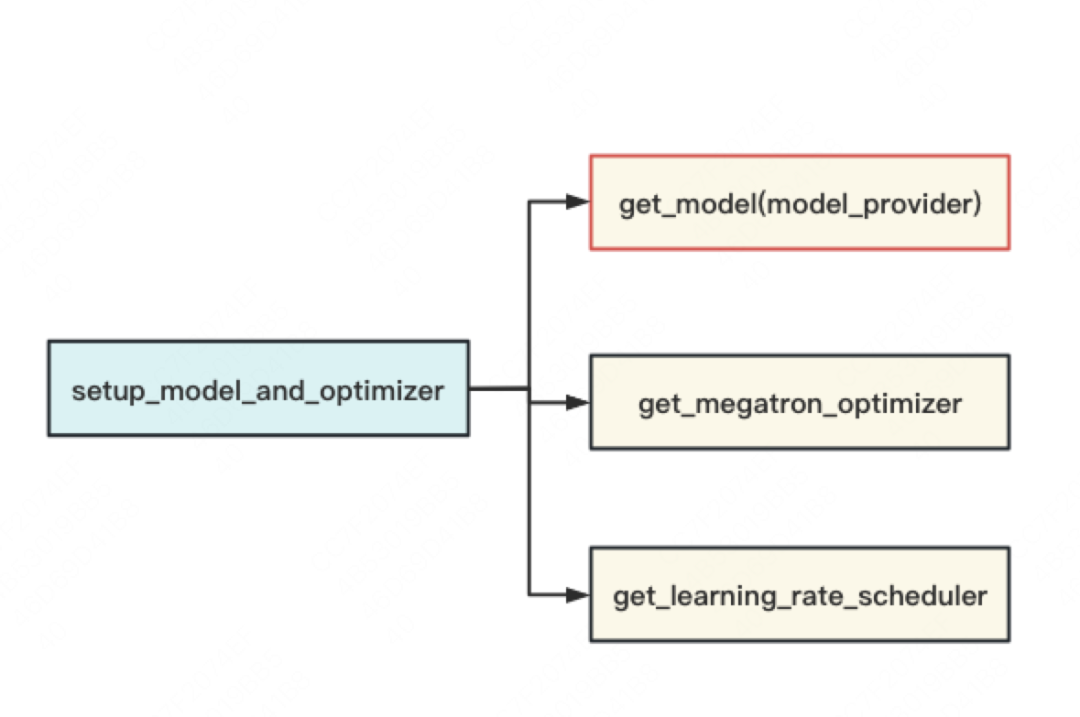
由代码可知,setup_model_and_optimizer是整个模型并行的入口函数,如下图,它主要由”「定义模型架构并切割模型」“,“「设置optimizer」”和“「设置学习率」”三部分组成。我们关注的重点在第一部分上(get_model)。
3.2 定义并搬运模型
get_model的内容可简化成下图:
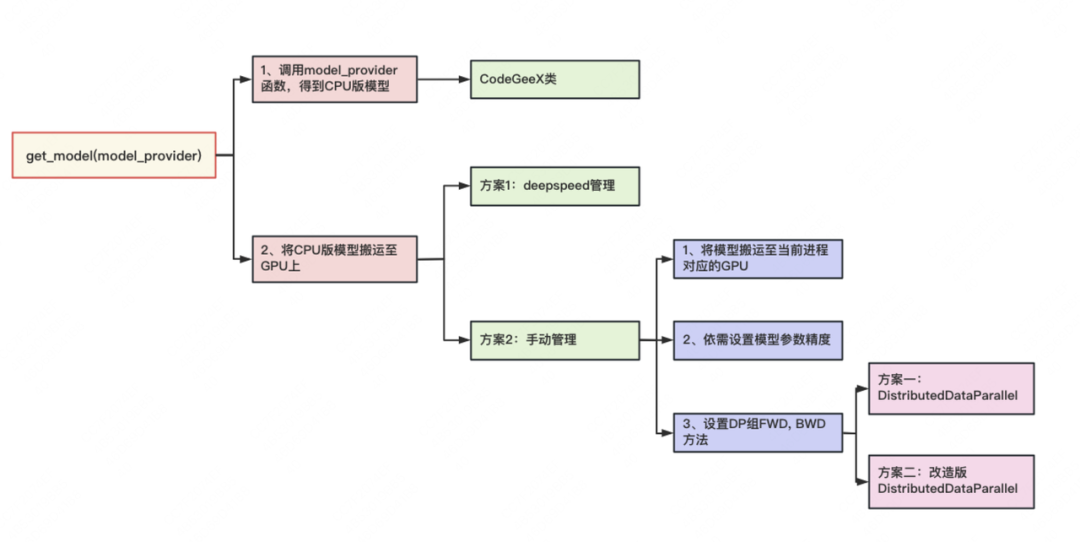
get_model函数主要做了两件事:
在CPU上定义模型。pytorch默认在CPU上定义模型(nn.Module)。
model_provider是一个函数,调用它即可返回CPU版的模型,也就是一个CodeGeeX类,这个将是下文要介绍的重点。把模型从CPU搬运至GPU上。这里有两种方法可供选择:
「显式搬运。」即手动将模型搬运到当前进程所对应的GPU上 「权重精度设定。」由ZeRO的思想可知,在模型训练中,把权重精度从fp32降至fp16,是一种节省显存的好办法。如果确定使用这种优化办法,将模型搬运到GPU上后,我们需要修改精度。 「初始化DP组」。这里指的是 定义DP组间forward、backward和梯度计算与通讯等方法。在Megatron中,TP和PP组的这些方法是人为定义的(在定义CPU模型时已设置好,我们将在下文讲CodeGeeX细节时看到),而DP组则是可以用现成的(torch的DistributedDataParallel)。在具体使用时,我们可以:(1)直接调用DistributedDataParallel。或(2)在DistributedDataParallel这个类的基础上做一些改进,例如增加对碎片化内存的管理,对计算梯度时的精度控制等。「方案一:借助deepspeed进行管理」。在源码解读1中我们提过,秉持着万物皆可wrap的原则,按照deepspeed官网教程,只需要在Megatron的某些文件中插入相应代码,就可以让deepspeed来管理模型的分布式、DP组间的显存优化等,这里同理。 「方案二:手动搬运管理。」这里需要我们以下事情:
get_model函数的核心代码如下(一切尽在注释中):
def get_model(model_provider_func):
"""Build the model."""
args = get_args()
# 1、定义并构建CPU版模型
if ( # 1.1、当分布式进行框架采用virtual pipeline (是NVDIA后续提出的对Megatron的优化方法,可先忽略不看)
mpu.get_pipeline_model_parallel_world_size() > 1
and args.virtual_pipeline_model_parallel_size is not None
):
model = []
for i in range(args.virtual_pipeline_model_parallel_size):
mpu.set_virtual_pipeline_model_parallel_rank(i)
# Set pre_process and post_process only after virtual rank is set.
pre_process = mpu.is_pipeline_first_stage()
post_process = mpu.is_pipeline_last_stage()
this_model = model_provider_func(
pre_process=pre_process, post_process=post_process
)
model.append(this_model)
else: # 1.2 其余情况
# 判断当前进程是否是PP组的第一个进程(例如第一部分图例中PP组的g0)
pre_process = mpu.is_pipeline_first_stage()
# 判断当前进程是否是PP组的最后一个进程(例如第一部分图例中PP组的g12)
post_process = mpu.is_pipeline_last_stage()
# 构建CPU版CodeGeeX模型
model = model_provider_func(pre_process=pre_process, post_process=post_process)
...
# 2、将模型从CPU搬运到GPU上
# 2.1 如果采用Megatron-DeepSpeed的方式,则直接返回模型,后面的搬运,数据并行等工作将由deepspeed来完成
# ref:https://www.deepspeed.ai/tutorials/megatron/
if args.deepspeed:
return model
# 将当前进程所维护的模型,从CPU搬运到GPU上(GPU即为在初始化时为当前进程分配的那块GPU)
print(f" > moving model to GPU ...", flush=True)
for model_module in model:
model_module.cuda(torch.cuda.current_device())
print(f" > moving to GPU done", flush=True)
# fp16转换(pytorch默认模型参数精度为fp32,依需决定计算过程中是否要转成fp16,节省显存)
if args.fp16 or args.bf16:
print(f" > converting model to fp16 ...", flush=True)
model = [Float16Module(model_module, args) for model_module in model]
print(f" > converting to fp16 done", flush=True)
# 采用pytorch定义的DistributedDataParallel管理数据并行
if args.DDP_impl == "torch":
i = torch.cuda.current_device()
model = [
torchDDP(
model_module,
device_ids=[i],
output_device=i,
process_group=mpu.get_data_parallel_group(), # 数据并行的组
)
for model_module in model
]
return model
# 采用自定义的DistributedDataParallel管理数据并行
# 即在pytorch的DistributedDataParallel的基础上,自己再定义内存管理、梯度精度等计算方式,更有效利用显存
if args.DDP_impl == "local": # 自定义的数据并行类在megatron/model/distributed.py下
print(f" > creating DDP model ...", flush=True)
model = [
LocalDDP(
model_module,
args.accumulate_allreduce_grads_in_fp32,
args.use_contiguous_buffers_in_ddp,
)
for model_module in model
]
print(f" > creating DDP model done", flush=True)
return model
raise NotImplementedError(
"Unknown DDP implementation specified: {}. " "Exiting.".format(args.DDP_impl)
)
特别说明的是,前文提过模型的首尾两层和中间层的架构可能不一样,因此我们通过pre_process 和post_process来做区分。(当然你也能选择用进程序id,只是首尾两层经常被Q到,所以这里单独明确了下)。对CodeGeeX来说,由它预训练配置可知,它的PP并行度为1,也就是1块GPU上涵盖了模型的第一层至最后一层,所以pre_process和post_process实际上没有用到。感兴趣的朋友可以阅读NVIDIA Megatron源码下关于bert、gpt2的预训练代码,具体了解pre_process和post_process在定义模型时起的作用。
3.3 分布式模型:CodeGeeX
现在,我们来看最核心的分布式模型:CodeGeeX类。
前文说过,1个脚本处理的是1个进程上发生的事情,而1个进程对应的是模型的一部分。单进程的架构如下:
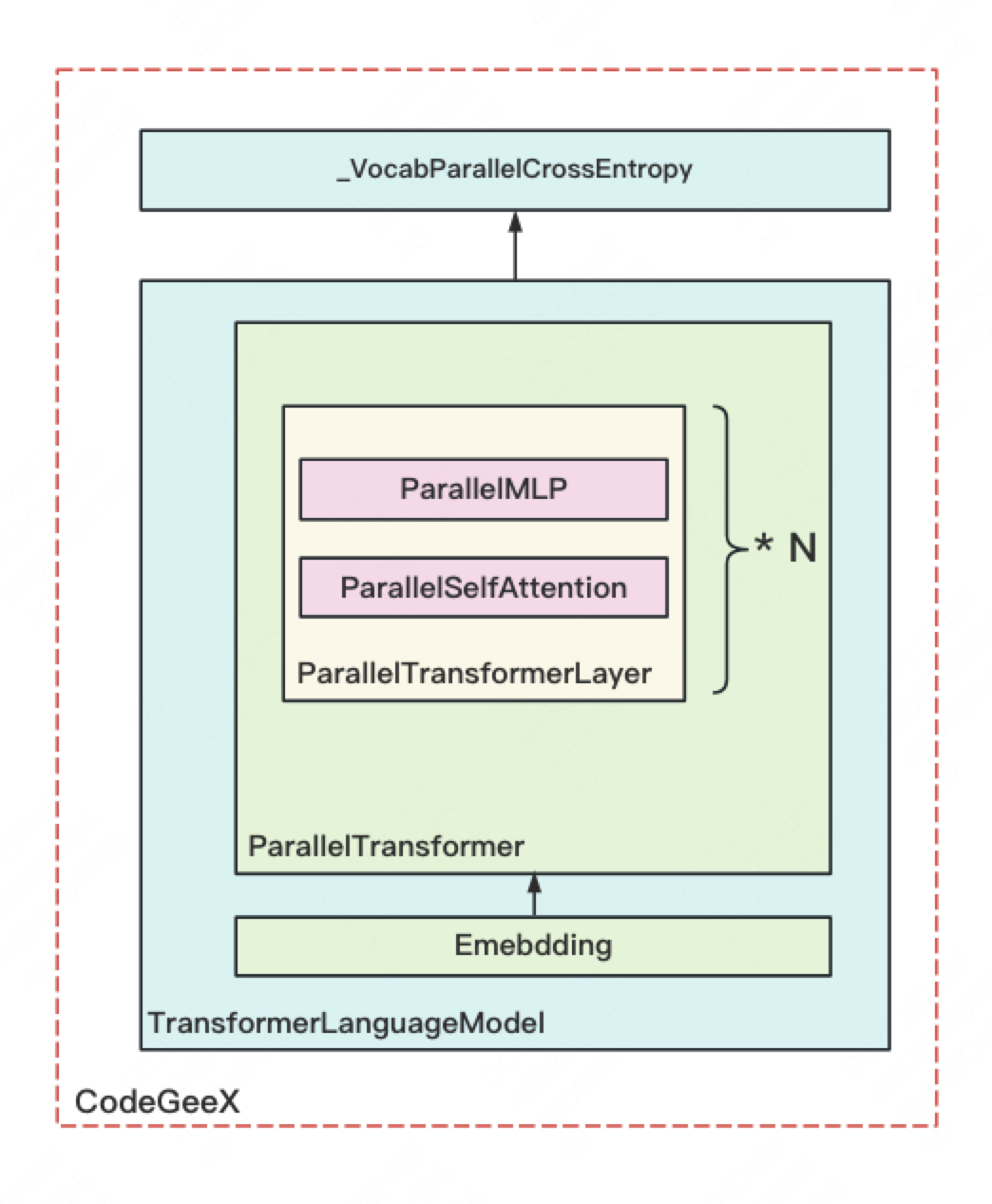
图中每个方框都表示源码里定义的一个nn.Module 类(除了最上的方框外)具体定义为:
CodeGeeX: 定义一块GPU上的模型。它由TransformerLanguageModel 和_VocabParallelCrossEntropy这两个核心类组成。TransformerLanguageModel:定义每块GPU上输入层embedding和中间block层的结构Embedding: 定义每块GPU上输入层embedding结构及相关计算,输出结果已AllReduce(TP组间)ParallelTransformer:定义每块GPU上所有中间blocks的结构及相关计算,输出结果已AllReduce(TP组间)ParallelTransformerLayer: 定义每块GPU上单个block的结构及相关计算,输出结果已AllReduce(TP组间)ParallelSelfAttention: 定义每块GPU上单个block中,attention的结构及相关计算,输出结果已AllReduce(TP组间)ParallelMLP: 定义每块GPU上单个block中,mlp层的结构及相关计算,输出结果已AllReduce(TP组间)。_VocabParallelCrossEntropy: torch.autograd.Function,定义每块GPU上,输出层embedding、softmax和loss等结构及相关计算。
「为什么需要对输出做AllReduce?」回顾Megtron理论部分的讲解,在纵向切割模型时,Megatron是在输入X完整的情况下,设计模型切割的方式的。因此,对于模型的每一层输出,我们都要在TP组间做AllReduce,来保证下一层拿到的输入也是完整的。类名字中的"Parallel",也是指在TP组中做并行,如下图所示:
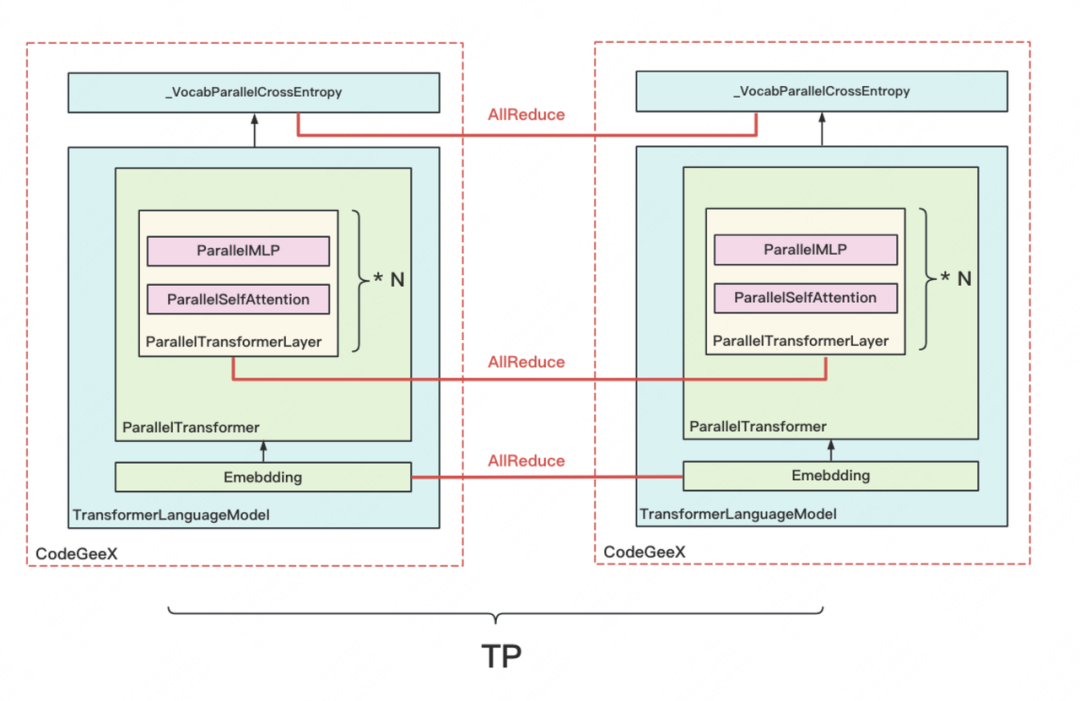
到这一步,我们终于把模型切割部分的整体流程讲完了。「虽然我们是以CodeGeeX为例,但这个流程图可以看作是通用的。」不同模型间只有模型具体结构、DP/TP/PP组设置这些方面的差别,整个并行框架是通用的。下面,我们来探究图中所绘的各个类的细节。
四、MegatronModule
上面所绘制的几类,并不是直接继承自nn.Module ,而是皆继承于自定义的class MegatronModule(torch.nn.Module)。我们说过,gpt类模型,输入和输出层共用一个word embedding。因此,这个类的主要作用,就是令PP组的第一个进程和最后一个进程满足这个条件(不过我不懂为什么要把这个限制放在一个大母类中去做,设计上感觉有点奇怪)。MegatronModule类的整体架构如下:
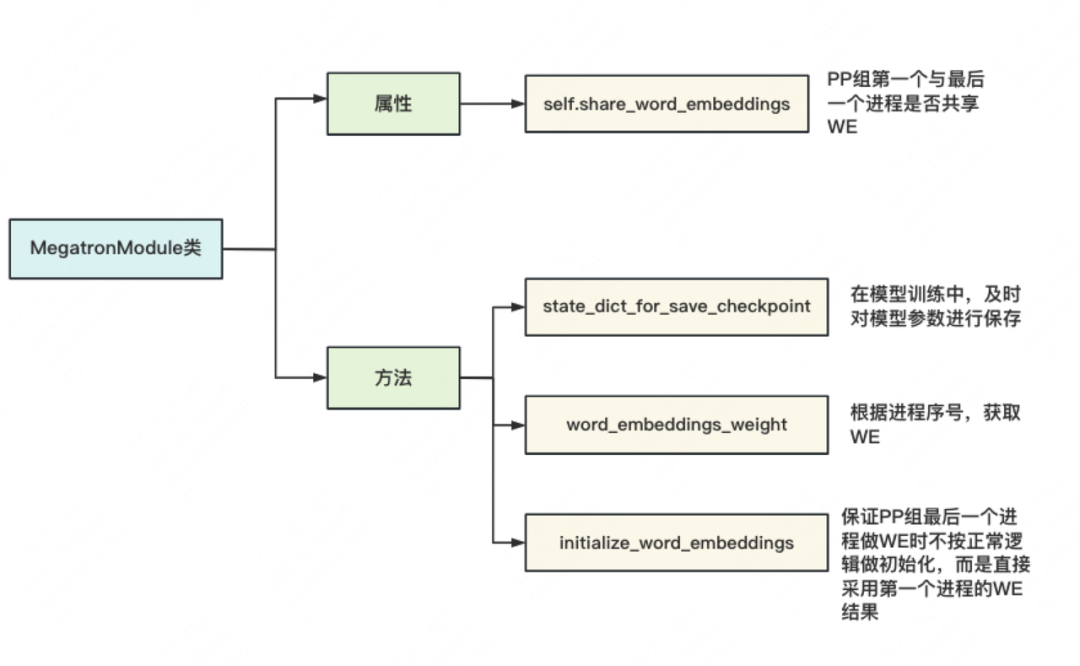
特别说明,「initialize_word_embedding 并不是某一具体的初始化WE方法,它只是起到如图所说的强制作用。」
MegatronModule的代码如下(一切尽在注释中):
class MegatronModule(torch.nn.Module):
"""Megatron specific extensions of torch Module with support
for pipelining."""
def __init__(self, share_word_embeddings=True):
super(MegatronModule, self).__init__()
# input和output是否要共享一套WE
self.share_word_embeddings = share_word_embeddings
def state_dict_for_save_checkpoint(
self, destination=None, prefix="", keep_vars=False
):
"""Use this function to override the state dict for
saving checkpoints."""
# 模型训练中,及时将参数保存到指定位置(设置checkpoint),
# 这样在训练出问题时,可以从checkpoint点重新load参数,继续训练
return self.state_dict(destination, prefix, keep_vars)
def word_embeddings_weight(self):
"""获取word_embedding"""
if mpu.is_pipeline_first_stage(ignore_virtual=True):
return self.language_model.embedding.word_embeddings.weight
if mpu.is_pipeline_last_stage(ignore_virtual=True):
if not self.share_word_embeddings:
raise Exception( # 强制要求共享一套embedding
"word_embeddings_weight() called for last "
"stage, but share_word_embeddings is false"
)
return self.word_embeddings.weight # 参见initialize_word_embeddings中WE的定义
raise Exception( # 如果当前进程是PP组的中间进程,则其上未维护WE,因此当然获取不到
"word_embeddings_weight() should be " "called for first and last stage only"
)
def initialize_word_embeddings(self, init_method_normal):
"""强制PP组最后一个进程初始化WE时,直接使用PP组第一个进程的WE"""
args = get_args()
if not self.share_word_embeddings: # 强制share embeddingg
raise Exception(
"initialize_word_embeddings() was called but "
"share_word_embeddings is false"
)
# PP组并行度为1时,第一层和最后一层都在一块GPU上,天然共享WE,无需做强制
if args.pipeline_model_parallel_size == 1:
return
# ---------------------------------------------------
# 如果流水线并行的度不为1时,依次做三件事:
# 【初始化时】:
# 1、在PP组最后一个进程上初始化一个WE,令其取值全为0
# 2、在PP组第一个进程与最后一个进程间做一次AllReduce,保证两者的WE完全一致
# 【训练时】:
# 3、每次想在PP组第一个/最后一个进程上使用WE时,要做一次通信,保证两者用的WE完全一致
if mpu.is_pipeline_last_stage(): # 若当前进程是PP组最后一个进程
assert not mpu.is_pipeline_first_stage()
self._word_embeddings_for_head_key = "word_embeddings_for_head"
# 初始化一个WE(已按vocab_size维度切割,可参见Megatron原理篇对WE的讲解)
# VocabParallelEmbedding将在下文详细讲解
self.word_embeddings = mpu.VocabParallelEmbedding(
args.padded_vocab_size, # vocab_size
args.hidden_size, # embed_dim
init_method=init_method_normal(args.init_method_std), # 初始化方法(在model/utils.py下)
)
# 用0填充WE(等待下面做AllReduce后取得第一个进程上的WE)
self.word_embeddings.weight.data.fill_(0)
self.word_embeddings.weight.shared = True
if torch.distributed.is_initialized():
if mpu.is_pipeline_first_stage() or mpu.is_pipeline_last_stage(): # 若当前进程是PP组第一个或最后一个进程
# 在两进程间做AllReduce,保证它们使用的WE完全一致
# mpu.get_embedding_group:在源码解读1中讲过,是除DP/TP/PP之外设置的又一进程组,
# 主要就是用来做关于WE的通讯
torch.distributed.all_reduce(
self.word_embeddings_weight().data, group=mpu.get_embedding_group()
)
else:
print(
"WARNING! Distributed processes aren't initialized, so "
"word embeddings in the last layer are not initialized. "
"If you are just manipulating a model this is fine, but "
"this needs to be handled manually. If you are training "
"something is definitely wrong."
)
五、Embedding
Emebdding类定义了word/position/segment embedding,并定义输入X过embedding层的计算方法。关键属性和方法如下图:

self.word_embeddings:来自自定义的VocabParallelEmbedding (下面会详述) 。「含“Parallel”则意味着参数在TP组间做了切割」。因此self.word_embeddings 是切割好的WE。每个进程上维护根据自己进程序号所取下的那块WE(例如下图中的WE1,WE2,图片来自Megatron原理篇):
self.position_embeddings和self.tokentype_embeddings这两者都和输入X相关,而输入X是不做切割的,因此这两者也无需切割。state_dict_for_save_checkpoint和load_state_dict。在源码注解里,这两个函数分别给出了"easy load" 和"customize load"的注释,这个注释不是很贴切。实际上,前者用于在模型训练过程中及时读取当前参数,及时保存(做checkpoint);后者则一般用于模型的重载,例如训到一半挂掉了,我们就重新初始化一个新模型,重载上个checkpoint保存下的权重。
Embedding层代码如下(一切尽在注释中):
class Embedding(MegatronModule):
"""Language model embeddings.
Arguments:
hidden_size: hidden size
vocab_size: vocabulary size
max_sequence_length: maximum size of sequence. This
is used for positional embedding
embedding_dropout_prob: dropout probability for embeddings
init_method: weight initialization method
num_tokentypes: size of the token-type embeddings. 0 value
will ignore this embedding
"""
def __init__(
self,
hidden_size, # 每个token的向量维度
vocab_size, # 词表大小
max_sequence_length, # 最长序列长度
embedding_dropout_prob, # dropout probability for embeddings
init_method, # 初始化权重的方法
num_tokentypes=0, # 类似于Bert中的segment type
):
super(Embedding, self).__init__()
args = get_args()
self.hidden_size = hidden_size
self.init_method = init_method
self.num_tokentypes = num_tokentypes
self.max_sequence_length = max_sequence_length
# WE size: (vocab_size//TP_N, hidden_size)
# TP_N表示TP组模型并行度
self.word_embeddings = mpu.VocabParallelEmbedding(
vocab_size, self.hidden_size, init_method=self.init_method)
self._word_embeddings_key = 'word_embeddings'
self.vocab_size = vocab_size
# PE size: (max_seq_len, hidden_size)
self.position_embeddings = torch.nn.Embedding(
max_sequence_length, self.hidden_size)
self.position_embeddings = self.position_embeddings.half()
self._position_embeddings_key = 'position_embeddings'
# Initialize the position embeddings.
self.init_method(self.position_embeddings.weight)
# TE_size:(num_tokentypes, hidden_size)
# TE类似于Bert中的segment embedding
self._tokentype_embeddings_key = 'tokentype_embeddings'
if self.num_tokentypes > 0:
self.tokentype_embeddings = torch.nn.Embedding(self.num_tokentypes,
self.hidden_size)
# Initialize the token-type embeddings.
self.init_method(self.tokentype_embeddings.weight)
else:
self.tokentype_embeddings = None
# Embeddings dropout
self.embedding_dropout = torch.nn.Dropout(embedding_dropout_prob)
def add_tokentype_embeddings(self, num_tokentypes):
"""如果在pretrain阶段未定义TE,而在fine-tune阶段TE,则可通过此函数添加
"""
if self.tokentype_embeddings is not None:
raise Exception('tokentype embeddings is already initialized')
if torch.distributed.get_rank() == 0:
print('adding embedding for {} tokentypes'.format(num_tokentypes),
flush=True)
self.num_tokentypes = num_tokentypes
self.tokentype_embeddings = torch.nn.Embedding(num_tokentypes,
self.hidden_size)
# Initialize the token-type embeddings.
self.init_method(self.tokentype_embeddings.weight)
def forward(self, input_ids, position_ids, tokentype_ids=None):
"""定义输入X过embedding层的计算方法
"""
# words_embeddings size = (b, seq_len, hidden_size)
# 再次注意:self.word_embeddings做forward时,最终的输出结果时AllReduce的(见上图)
words_embeddings = self.word_embeddings(input_ids)
# position_embeddings size = (b, seq_len, hidden_size)
position_embeddings = self.position_embeddings(position_ids)
# embedding = WE + PE
# embedding size = (b, seq_len, hidden_size)
embeddings = words_embeddings + position_embeddings
# 依需要决定是否增加TE
if tokentype_ids is not None:
assert self.tokentype_embeddings is not None
embeddings = embeddings + self.tokentype_embeddings(tokentype_ids)
else:
assert self.tokentype_embeddings is None
# Dropout.
embeddings = self.embedding_dropout(embeddings)
return embeddings
def state_dict_for_save_checkpoint(
self, destination=None, prefix='', keep_vars=False,
):
"""For easy load.
在模型训练过程中及时读取当前参数,方便及时保存(做checkpoint)
篇幅限制,这里不展示细节
"""
...
def load_state_dict(self, state_dict, strict=True):
"""Customized load.
用于模型的重载。例如训到一半挂掉了,我们就重新初始化一个新模型,
重载上个checkpoint保存下的权重。
篇幅限制,这里不展示细节
"""
...
六、VocabParallelEmbedding
该类用于定义分布式的word embedding,整体架构如下,同样只列举了核心属性和方法:
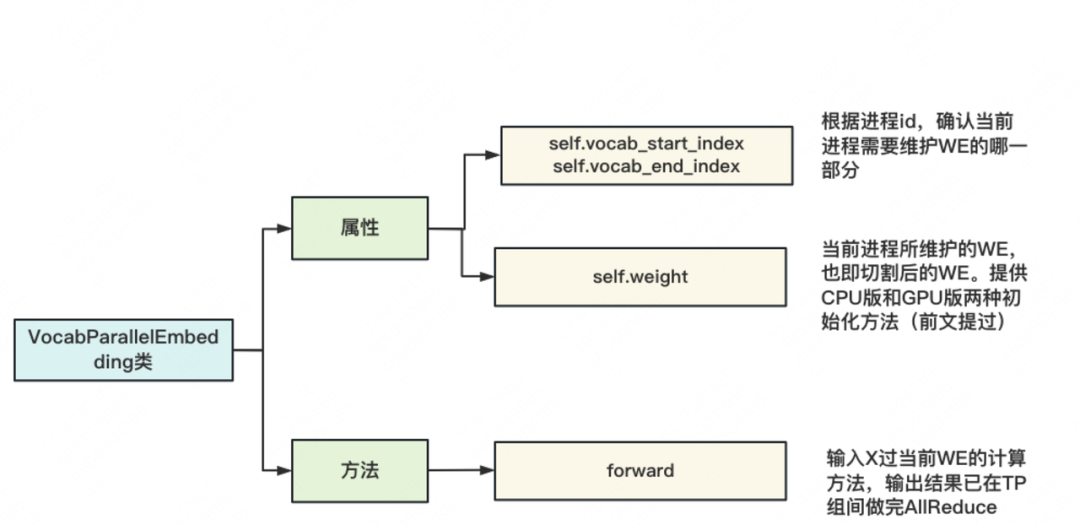
具体代码如下,可以特别关注「初始化和forward」部分,同时建议大家阅读理论篇中关于这一过程的详细讲解(一切尽在注释中)
class VocabParallelEmbedding(torch.nn.Module):
"""Embedding parallelized in the vocabulary dimension.
This is mainly adapted from torch.nn.Embedding and all the default
values are kept.
Arguments:
num_embeddings: vocabulary size.
embedding_dim: size of hidden state.
init_method: method to initialize weights.
"""
def __init__(self, num_embeddings, embedding_dim, init_method=init.xavier_normal_):
super(VocabParallelEmbedding, self).__init__()
# Keep the input dimensions.
self.num_embeddings = num_embeddings # vocab_size
self.embedding_dim = embedding_dim # hidden_state.
# Set the detauls for compatibility.
self.padding_idx = None
self.max_norm = None
self.norm_type = 2.0
self.scale_grad_by_freq = False
self.sparse = False
self._weight = None
# 当前进程所在TP组进程总数
self.tensor_model_parallel_size = get_tensor_model_parallel_world_size()
# 根据当前进程在TP组中的序号,确定其所需维护的WE部分,沿着vocab维度对WE进行切割
# 例如,进程id=0, 维护词表序号[0,5)范围内的数据;进程id=1,维护[5,10)
(
self.vocab_start_index,
self.vocab_end_index,
) = VocabUtility.vocab_range_from_global_vocab_size(
self.num_embeddings,
get_tensor_model_parallel_rank(),
self.tensor_model_parallel_size,
)
# 计算当前进程维护的词表大小
self.num_embeddings_per_partition = (
self.vocab_end_index - self.vocab_start_index
)
# 对WE做初始化
args = get_args() # 读取预训练参数配置
if args.use_cpu_initialization: # CPU上做初始化
self.weight = Parameter( # 在CPU上先生成一个完整的WE
torch.empty(
self.num_embeddings_per_partition,
self.embedding_dim,
dtype=args.params_dtype,
# dtype=torch.float32,
)
)
# 对CPU上的WE做切割(随机种子在初始化分布式中已设定好,不用变)
_initialize_affine_weight_cpu(
self.weight,
self.num_embeddings,
self.embedding_dim,
self.num_embeddings_per_partition,
0,
init_method, # 初始化权重的方法,例如xavier之类
)
else: # 在GPU上做初始化
self.weight = Parameter( # 生成一个切割好的WE
torch.empty(
self.num_embeddings_per_partition,
self.embedding_dim,
device=torch.cuda.current_device(),
dtype=args.params_dtype,
# dtype=torch.float32,
)
)
# 在GPU上做初始化,注意TP组内不同进程采用不同的随机种子
_initialize_affine_weight_gpu(
self.weight, init_method, partition_dim=0, stride=1
)
def forward(self, input_):
"""定义输入X过WE的计算方法,输出结果已经过AllReduce"""
if self.tensor_model_parallel_size > 1: # 如果使用TP
# 如果在当前进程维护的WE上,找不到对应的单词,那么对应位置就赋0
# 例如当前的数据的tokenid是:[2,7,1,5],当前维护的词表是[0,1,2](start_index=0, end_index = 3),
# 则mask之后的数据为[2,0,1,0]
# Build the mask.
input_mask = (input_ < self.vocab_start_index) | (
input_ >= self.vocab_end_index
)
# Mask the input.
masked_input = input_.clone() - self.vocab_start_index
masked_input[input_mask] = 0
else:
masked_input = input_
# 输入X,过当前进程维护的部分WE的结果
output_parallel = F.embedding(
masked_input, # tensor containing indices into the embedding matrix
self.weight, # 切割好的word embedding的权重
self.padding_idx,
self.max_norm,
self.norm_type,
self.scale_grad_by_freq,
self.sparse,
)
# 当前词表不维护的部分,都设为0
if self.tensor_model_parallel_size > 1:
output_parallel[input_mask, :] = 0.0 #
# 将TP组各GPU上的结果做AllReduce
output = reduce_from_tensor_model_parallel_region(output_parallel)
return output
def _initialize_affine_weight_cpu(...):
"""CPU版权重初始化。这个不难,大家可以自己阅读"""
...
def _initialize_affine_weight_gpu(...):
"""GPU版权重初始化。特别关注设置随机种子部分"""
...
# 借助deepspeed或自定义的get_cuda_rng_tracker方法,对随机种子进行操作
# get_cuda_rng_tracker细节,大家可自行阅读源码
if ds_checkpointing.is_configured():
global get_cuda_rng_tracker
get_cuda_rng_tracker = ds_checkpointing.get_cuda_rng_tracker
with get_cuda_rng_tracker().fork():
init_method(weight)
七、ParallelSelfAttention:分布式block的一般套路
【阅读提示】:阅读本节时可:
对照第一部分CodeGeeX框架图 对照Megatron理论篇对矩阵切分的讲解
首先来看切割Attention的示意图,由图可知,「对QKV矩阵,采用“列切割”,对线性矩阵B,采用“行切割”」。这样设计的好处是,在经过QKV的计算后,各进程在不用通讯的前提下,继续做线性计算,直到最后一步才AllReduce,起到降低通讯成本的作用:
我们先单独来看“列切割”与“行切割”的实现代码。Megatron将它们定义成了两个nn.Module类。
7.1 列切割:ColumnParallelLinear
列切割示意图如下:
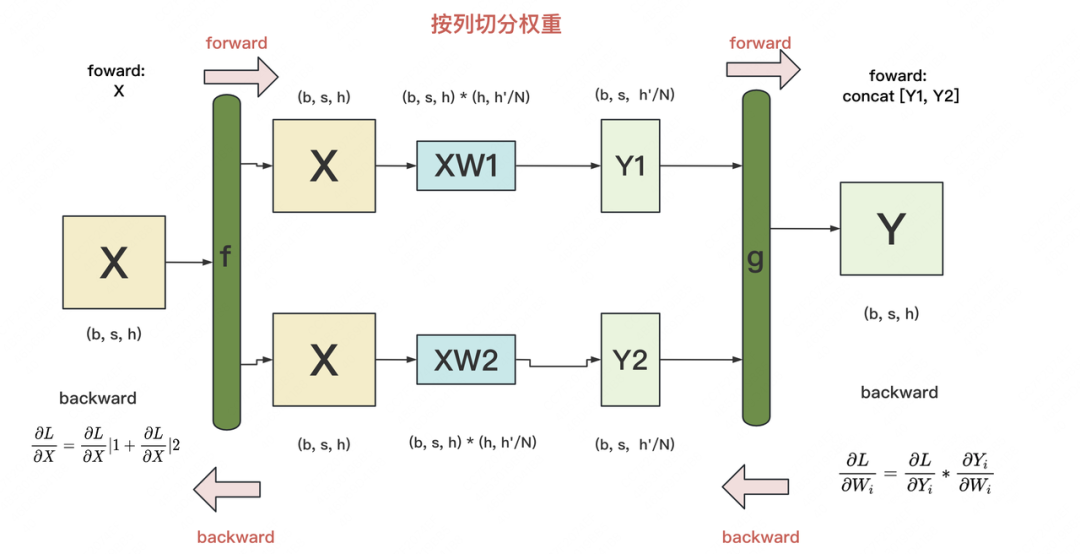
f和g是两个共轭算子,可理解为两个torch.autograd.Function类。在这个类下,我们可以「根据需要重写forward和backward方法」。f: 「forward中,直接copy输入;backward中,对梯度做AllReduce」。在代码里定义为class _CopyToModelParallelRegion(torch.autograd.Function)g: 「forward中,all-gather输出;backward中,对梯度做split」(每张卡经过all-gather已有完整的Y了,因此以Y为起点计算梯度后,沿着列做split就可得到Y1和Y2的梯度)。在代码里定义为class _GatherFromModelParallelRegion(torch.autograd.Function)
class ColumnParallelLinear(torch.nn.Module):
"""Linear layer with column parallelism.
The linear layer is defined as Y = XA + b. A is parallelized along
its second dimension as A = [A_1, ..., A_p].
Arguments:
input_size: first dimension of matrix A.
output_size: second dimension of matrix A.
bias: If true, add bias
gather_output: If true, call all-gether on output and make Y avaiable
to all GPUs, otherwise, every GPU will have its output
which is Y_i = XA_i
init_method: method to initialize weights. Note that bias is always set
to zero.
stride: For the strided linear layers.
keep_master_weight_for_test: This was added for testing and should be
set to False. It returns the master weights
used for initialization.
skip_bias_add: This was added to enable performance optimations where bias
can be fused with other elementwise operations. we skip
adding bias but instead return it.
"""
# 该类定义了切割后的权重W,例如对上图来说,W1和W2都可分别视为该类的一个实例
def __init__(
self,
input_size, # W的第一个维度
output_size, # W的第二个维度
bias=True, # 是否需要引入bias
gather_output=True, # 决定是否要将Y1和Y2做all-gather
init_method=init.xavier_normal_,
stride=1,
keep_master_weight_for_test=False,
skip_bias_add=False,
params_dtype=None,
skip_init=False,
device=None,
):
super(ColumnParallelLinear, self).__init__()
# Keep input parameters
self.input_size = input_size
self.output_size = output_size
self.gather_output = gather_output
# Divide the weight matrix along the last dimension.
# 当前进程所在TP组的总进程数
world_size = get_tensor_model_parallel_world_size()
# 每块GPU上维护的hidden_size的大小,等于 原hidden_zize // TP组总进程数
self.output_size_per_partition = divide(output_size, world_size)
self.skip_bias_add = skip_bias_add
self.params_dtype = params_dtype
self.device = device
# Parameters.
# Note: torch.nn.functional.linear performs XA^T + b and as a result
# Initialize weight.
args = get_args() # 取得命令行所有的参数
if not skip_init:
if args.use_cpu_initialization: # CPU上初始化
self.weight = Parameter(
torch.empty(
self.output_size_per_partition,
self.input_size,
dtype=self.params_dtype if self.params_dtype is not None else args.params_dtype,
)
)
self.master_weight = _initialize_affine_weight_cpu( #
self.weight,
self.output_size,
self.input_size,
self.output_size_per_partition,
0,
init_method,
stride=stride,
return_master_weight=keep_master_weight_for_test,
)
else: # GPU上初始化
self.weight = Parameter(
torch.empty(
self.output_size_per_partition,
self.input_size,
device=self.device if self.device is not None else torch.cuda.current_device(),
dtype=self.params_dtype if self.params_dtype is not None else args.params_dtype,
)
)
_initialize_affine_weight_gpu(
self.weight, init_method, partition_dim=0, stride=stride
)
else:
self.register_parameter("weight", None)
# 对bias做处理,道理同weight
if bias and not skip_init:
if args.use_cpu_initialization: # CPU上初始化
self.bias = Parameter(
torch.empty(self.output_size_per_partition,
dtype=self.params_dtype if self.params_dtype is not None else args.params_dtype)
)
else:
self.bias = Parameter( # GPU上初始化
torch.empty(
self.output_size_per_partition,
device=self.device if self.device is not None else torch.cuda.current_device(),
dtype=self.params_dtype if self.params_dtype is not None else args.params_dtype,
)
)
set_tensor_model_parallel_attributes(self.bias, True, 0, stride)
# Always initialize bias to zero.
with torch.no_grad():
self.bias.zero_()
else:
self.register_parameter("bias", None)
def forward(self, input_):
# 定义列切割中的f算子
# 调用copy_to_tensor_model_parallel_region则新建一个_CopyToModelParallelRegion实例(见下)
input_parallel = copy_to_tensor_model_parallel_region(input_)
bias = self.bias if not self.skip_bias_add else None # 定义bias
output_parallel = F.linear(input_parallel, self.weight, bias) # X * 切割好的权重
# 决定是否要对每个进程上的输出结果做All-Reduce
if self.gather_output:
# 定义列切割中的g算子
# 调用gather_from_tensor_model_parallel_region则新建一个_GatherFromModelParallelRegion实例(见下)
output = gather_from_tensor_model_parallel_region(output_parallel) # 把各GPU上的输出按照列gather起来后,作为最终输出
else:
output = output_parallel # 否则最终输出还是自己算的那块GPU
output_bias = self.bias if self.skip_bias_add else None
return output, output_bias
# 列切割中的f与g
class _CopyToModelParallelRegion(torch.autograd.Function):
"""Pass the input to the model parallel region."""
# 列切割下的f算子
# forward:copy输入
# backward:对梯度做AllReduce
@staticmethod
def symbolic(graph, input_):
return input_
@staticmethod
def forward(ctx, input_):
return input_
@staticmethod
def backward(ctx, grad_output):
return _reduce(grad_output)
class _GatherFromModelParallelRegion(torch.autograd.Function):
"""Gather the input from model parallel region and concatinate."""
# 列切割中的g算子
# forward:All-Gather输出
# backward:对梯度,沿着列方向做split
@staticmethod
def symbolic(graph, input_):
return _gather(input_)
@staticmethod
def forward(ctx, input_):
return _gather(input_)
@staticmethod
def backward(ctx, grad_output):
return _split(grad_output)
7.2 行切割:RowParallelLinear
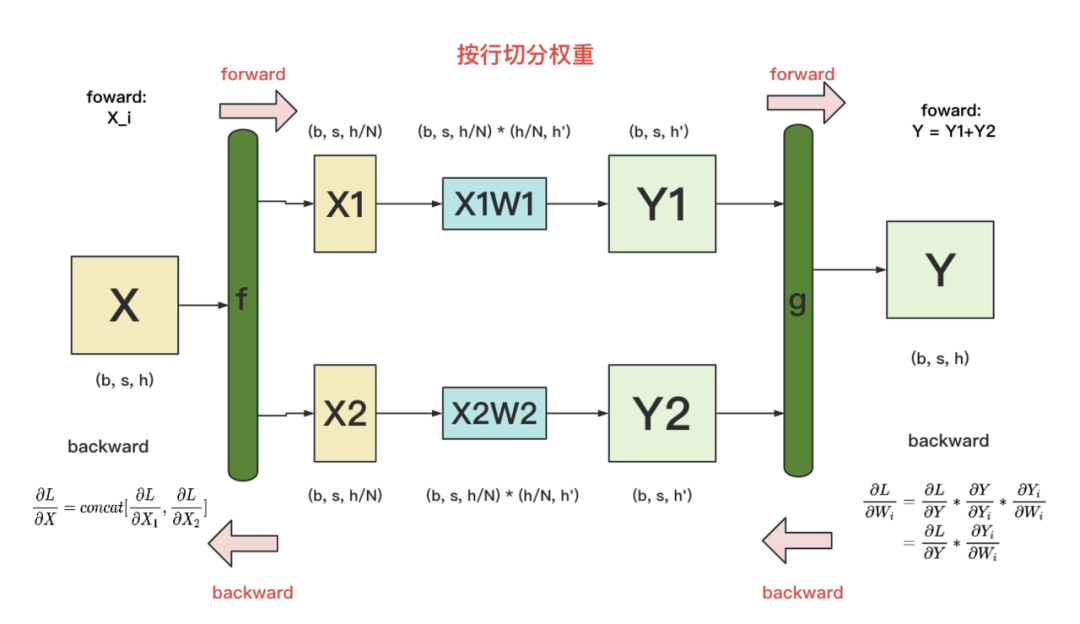
f: forward中,按列split输入;backward中,all-gather梯度g: forward中,AllReduce输出;backward中,直接输出梯度,无需做任何通讯(因为经过g的foward,每块GPU上已拥有了Yi和Y,则根据图中g的backward公式可知,每块GPU可独立计算梯度)
代码如下:
class RowParallelLinear(torch.nn.Module):
"""Linear layer with row parallelism.
The linear layer is defined as Y = XA + b. A is parallelized along
its first dimension and X along its second dimension as:
- -
| A_1 |
| . |
A = | . | X = [X_1, ..., X_p]
| . |
| A_p |
- -
Arguments:
input_size: first dimension of matrix A.
output_size: second dimension of matrix A.
bias: If true, add bias. Note that bias is not parallelized.
input_is_parallel: If true, we assume that the input is already
split across the GPUs and we do not split
again.
init_method: method to initialize weights. Note that bias is always set
to zero.
stride: For the strided linear layers.
keep_master_weight_for_test: This was added for testing and should be
set to False. It returns the master weights
used for initialization.
skip_bias_add: This was added to enable performance optimations where bias
can be fused with other elementwise operations. we skip
adding bias but instead return it.
"""
def __init__(
self,
input_size,
output_size,
bias=True,
input_is_parallel=False,
init_method=init.xavier_normal_,
stride=1,
keep_master_weight_for_test=False,
skip_bias_add=False,
params_dtype=None,
skip_init=False,
device=None,
):
super(RowParallelLinear, self).__init__()
# Keep input parameters
self.input_size = input_size
self.output_size = output_size
self.input_is_parallel = input_is_parallel
# Divide the weight matrix along the last dimension.
world_size = get_tensor_model_parallel_world_size()
self.input_size_per_partition = divide(input_size, world_size)
self.skip_bias_add = skip_bias_add
self.params_dtype = params_dtype
self.device = device
# Parameters.
# Note: torch.nn.functional.linear performs XA^T + b and as a result
# we allocate the transpose.
# Initialize weight.
args = get_args()
if not skip_init:
if args.use_cpu_initialization:
self.weight = Parameter(
torch.empty(
self.output_size,
self.input_size_per_partition,
dtype=self.params_dtype if self.params_dtype is not None else args.params_dtype,
)
)
self.master_weight = _initialize_affine_weight_cpu(
self.weight,
self.output_size,
self.input_size,
self.input_size_per_partition,
1,
init_method,
stride=stride,
return_master_weight=keep_master_weight_for_test,
)
else:
self.weight = Parameter(
torch.empty(
self.output_size,
self.input_size_per_partition,
device=self.device if self.device is not None else torch.cuda.current_device(),
dtype=self.params_dtype if self.params_dtype is not None else args.params_dtype,
)
)
_initialize_affine_weight_gpu(
self.weight, init_method, partition_dim=1, stride=stride
)
else:
self.register_parameter("weight", None)
if bias and not skip_init:
if args.use_cpu_initialization:
self.bias = Parameter(
torch.empty(self.output_size,
dtype=self.params_dtype if self.params_dtype is not None else args.params_dtype)
)
else:
self.bias = Parameter(
torch.empty(
self.output_size,
device=self.device if self.device is not None else torch.cuda.current_device(),
dtype=self.params_dtype if self.params_dtype is not None else args.params_dtype,
)
)
# Always initialize bias to zero.
with torch.no_grad():
self.bias.zero_()
else:
self.register_parameter("bias", None)
def forward(self, input_):
# Set up backprop all-reduce.
if self.input_is_parallel:
input_parallel = input_
else:
input_parallel = scatter_to_tensor_model_parallel_region(input_)
# Matrix multiply.
output_parallel = F.linear(input_parallel, self.weight)
# All-reduce across all the partitions.
output_ = reduce_from_tensor_model_parallel_region(output_parallel)
if not self.skip_bias_add:
output = output_ + self.bias if self.bias is not None else output_
output_bias = None
else:
output = output_
output_bias = self.bias
return output, output_bias
# 行切割中的f和g算子
class _ScatterToModelParallelRegion(torch.autograd.Function):
"""Split the input and keep only the corresponding chuck to the rank."""
# 行切割中的f算子
# forward:沿列split输入
# backward:all-gather梯度
@staticmethod
def symbolic(graph, input_):
return _split(input_)
@staticmethod
def forward(ctx, input_):
return _split(input_)
@staticmethod
def backward(ctx, grad_output):
return _gather(grad_output)
class _ReduceFromModelParallelRegion(torch.autograd.Function):
"""All-reduce the input from the model parallel region."""
# 行切割中的g算子
# forward:AllReduce输出
# backward:正常计算梯度,GPU间无需做任何通讯
@staticmethod
def symbolic(graph, input_):
return _reduce(input_)
@staticmethod
def forward(ctx, input_):
return _reduce(input_)
@staticmethod
def backward(ctx, grad_output):
return grad_output
7.3 ParallelSelfAttention
该类的构造如下图:
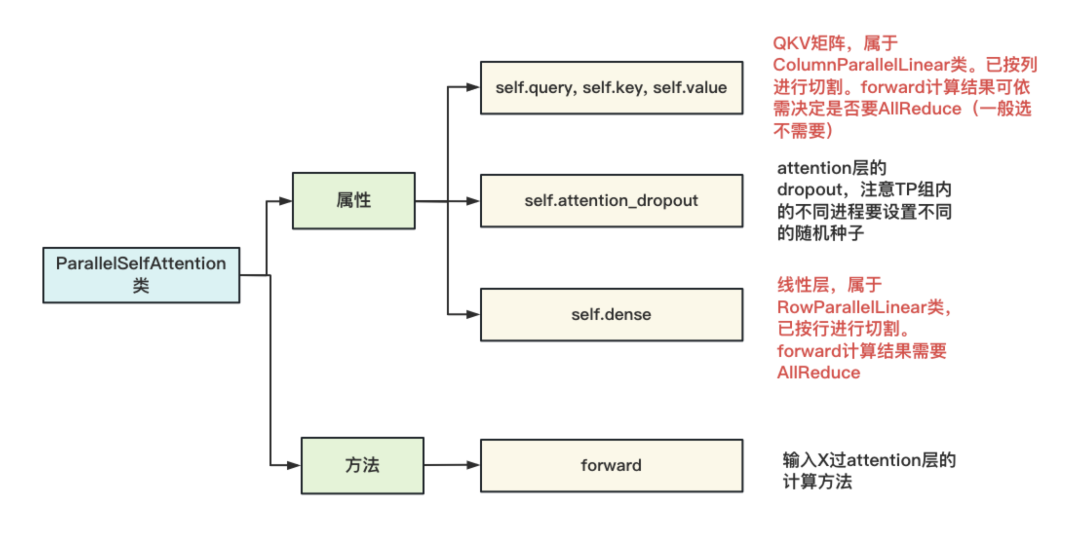
这张图中透露的核心含义是,「每个进程上维护的都是按列切割完的QKV矩阵」,进程间独立计算,QKV矩阵的输出结果一般不做AllReduce。同时,「每个进程上维护的是按行切割完的dense(线型层)矩阵」,Attention输出过线性层后的结果,做AllReduce。另外,在设置attention_dropout时,同样调用了get_cuda_rng_tracker 方法,令TP组内的进程拥有不同的随机种子。「最后,你可能想问,dense后的dropout去哪里了」?代码里把它定义到了ParallelTransformerLayer 下(等于attention + mlp)。
相信有了上面的说明,看这块代码就不难了。篇幅限制,这里不展示代码了。大家可以对照着CodeGeeX架构图,来看这里multi-head attention的计算方式。
ParallelMLP,ParallelTransformerLayer和ParallelTransformer都采用的是一样的套路,也略过不言。
八、CrossEntropy
现在,终于可以来看模型的最后一层:交叉熵的平行计算。核心类为_VocabParallelCrossEntropy
我们在原理篇中讲过交叉熵的并行计算,其优化核心是将通讯量从b*s*v降至b*s。但是Megatron代码中定义的交叉熵计算方式,稍微复杂一些,也和我们一般理解的交叉熵有些许差异。所以我们先用图解,来看下代码定义的交叉熵计算流程:
【注】:
对X和Y_i来说,(b, s, h)维度下应该画成一个立方体,为了表达简练,这里将b拍平了。 对其余维度中含b的矩阵,b正常表示,即row=b
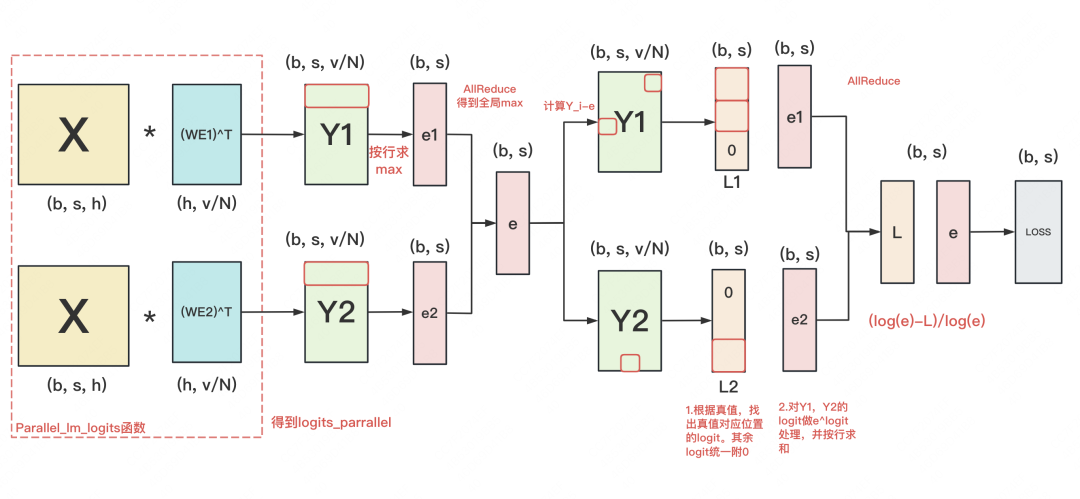
8.1 计算logit
首先,在使用_VocabParallelCrossEntropy 计算交叉熵前,我们需要计算logit。这时我们调用parallel_lm_logits 函数,将模型最后一层的输出X(复习一下,这个X已经在TP组内AllReduce了),乘上当前进程上维护的输入层WE的转置(复习一下,输入层和输出层共用一套embedding),得到当前进程的logit Y_i,「同时我们选择不对输出logit做AllReduce」。
你可能会有一个疑惑:「在Transformer中,输出层会额外训练一个线性矩阵,来计算logit;为什么在gpt中,可以用输入层WE的转置来代替这个线性矩阵?」
这个问题的答案,对理解Megatron交叉熵计算也至关重要。我们可「将X*WE^T结果理解成“X与WE间的相似度”」,例如对Y1来说,它的第一行中的每个logit,表示第一个token与词表里每个词的相似度。
注意到每个进程上只维护部分WE。例如,假设词表共有5个单词,WE1维护前5个单词,WE2维护后5个单词。因此再严格来说:「对Y1,它的第一行中的每个logit,表示第一个token与词表中前5个词的相似度;对Y2,它的第一行中的每个logit,表示第一个token与词表中后5个词的相似度。我们要记住这个含义。」
8.2 计算交叉熵
知道了logit的含义,我们来看交叉熵计算。
首先做了一系列求max的计算,得到基于全局的max(logit),再将orig_logit - max(logit),得到处理后的结果。这步理解起来不难,主要目的是为了防止计算溢出。
「接下来,就是基于logit算loss了。」
每个进程上都有一份(b, s)维度的真值,它表示每个token的真值是哪个词(词用id表示)。我们基于这份真值,在Y_i上找出真值位置的logit。例如:seq_length = 3,即我们需要对3个token去做预测,假设前两个token的真值在第1个进程所维护的WE1中,最后一个token的真值在第2个进程所维护的WE2中。那么我们去Y1的前两行里,取出真值位置的logit,这个logit表示“token与真值的相似度”,去Y2的最后一行里做同样操作。
这样,我们就能得到L1和L2,和真值位置不对应的地方,统一填充0。随后对L1和L2做AllReduce,得到L。「L中的每行表示“token与真值间的相似度"」
现在,我们回来对Y1和Y2的每一行求sum(e^logit),得到e1和e2。将e1和e2做AllReduce,得到e。「e中的每行表示“token和词表中所有词相似度的总和”」
我们希望「(token和词表中所有词相似度的总和-token与真值间的相似度) /token和词表中所有词相似度的总和」这个值最小,这个差值就是最终的loss。
8.3 代码
理清了这点,现在可以来看代码了(一切尽在注释中),建议对这块还有疑问的朋友,可以写个test脚本把中间结果打印出来,方便理解:
class _VocabParallelCrossEntropy(torch.autograd.Function):
"""
分布式计算Loss
"""
@staticmethod
def forward(ctx, vocab_parallel_logits, target):
# 1. logit - global max(logit)操作,主要目的是防溢出
logits_max = torch.max(vocab_parallel_logits, dim=-1)[0] # (b, s, 1)
torch.distributed.all_reduce( # (b, s, 1)
logits_max,
op=torch.distributed.ReduceOp.MAX, # 找全局最大值
group=get_tensor_model_parallel_group(),
)
# Subtract the maximum value.
vocab_parallel_logits.sub_(logits_max.unsqueeze(dim=-1)) # 原始GPU上维护的logits减去每行最大值(防止溢出)
# 2、根据当前进程id,取出当前进程所维护词表序号等信息
# 函数,能够获取当前进程所维护词表的start_index和end_index
get_vocab_range = VocabUtility.vocab_range_from_per_partition_vocab_size
# 这块GPU上logits最后一维的大小,等于所维护的词表的大小(v/N)
partition_vocab_size = vocab_parallel_logits.size()[-1]
# 取得当前进程所在TP组中的序号
rank = get_tensor_model_parallel_rank()
# 取得当前进程所在TP组的总进程数
world_size = get_tensor_model_parallel_world_size()
# 取得当前进程所维护的词表的start_index和end_index
vocab_start_index, vocab_end_index = get_vocab_range(
partition_vocab_size, rank, world_size
)
# 3. 基于真值,取出每个token在真值位置上的logit(即和真值的相似度)
# Create a mask of valid vocab ids (1 means it needs to be masked)
target_mask = (target < vocab_start_index) | (target >= vocab_end_index) # target = (b, s)
masked_target = target.clone() - vocab_start_index
masked_target[target_mask] = 0
# Get predicted-logits = logits[target].
# For Simplicity, we convert logits to a 2-D tensor with size
# [*, partition-vocab-size] and target to a 1-D tensor of size [*].
logits_2d = vocab_parallel_logits.view(-1, partition_vocab_size) # (b*s, v/N)
masked_target_1d = masked_target.view(-1) # (b*s)
arange_1d = torch.arange( # [b*s]
start=0, end=logits_2d.size()[0], device=logits_2d.device
)
# logits_2d[arange_1d, masked_target_1d]:
# tensor的切片操作。arange_1d:取出所有的行。masked_target_1d:取出logit
predicted_logits_1d = logits_2d[arange_1d, masked_target_1d] # (b*s)
predicted_logits_1d = predicted_logits_1d.clone().contiguous()
predicted_logits = predicted_logits_1d.view_as(target) # (b, s)
predicted_logits[target_mask] = 0.0
# All reduce is needed to get the chunks from other GPUs.
torch.distributed.all_reduce( # allreduce之后得到的logit矩阵为(b, s),每一个位置表示对应真值位置的预测logit
predicted_logits,
op=torch.distributed.ReduceOp.SUM,
group=get_tensor_model_parallel_group(),
)
# Sum of exponential of logits along vocab dimension across all GPUs.
exp_logits = vocab_parallel_logits # (b, s, v/N)
torch.exp(vocab_parallel_logits, out=exp_logits)
sum_exp_logits = exp_logits.sum(dim=-1) # (b, s)
torch.distributed.all_reduce(
sum_exp_logits,
op=torch.distributed.ReduceOp.SUM,
group=get_tensor_model_parallel_group(),
)
# 4. 计算Loss = log(sum(exp(logits))) - predicted-logit.
loss = torch.log(sum_exp_logits) - predicted_logits # (b, s)
# Store softmax, target-mask and masked-target for backward pass.
exp_logits.div_(sum_exp_logits.unsqueeze(dim=-1))
ctx.save_for_backward(exp_logits, target_mask, masked_target_1d)
return loss
@staticmethod
def backward(ctx, grad_output):
# Retreive tensors from the forward path.
softmax, target_mask, masked_target_1d = ctx.saved_tensors
# All the inputs have softmax as their gradient.
grad_input = softmax
# For simplicity, work with the 2D gradient.
partition_vocab_size = softmax.size()[-1]
grad_2d = grad_input.view(-1, partition_vocab_size)
# Add the gradient from matching classes.
arange_1d = torch.arange(start=0, end=grad_2d.size()[0], device=grad_2d.device)
grad_2d[arange_1d, masked_target_1d] -= 1.0 - target_mask.view(-1).float()
# Finally elementwise multiplication with the output gradients.
grad_input.mul_(grad_output.unsqueeze(dim=-1))
return grad_input, None
九、总结
啊这总结怎么写呢,呕心沥血终于写完了。希望能给到大家帮助!
十、参考
1、「codegeex github」: https://github.com/THUDM/CodeGeeX/tree/7365d9df242d87a5583d3f203e4b6c547dc6240e
2、「NVIDIA Megatron github」: https://github.com/NVIDIA/Megatron-LM/tree/2c493fb3fd37e5ecac068607b408ed5724d80fcc
3、「torch distributed tutorial」: https://pytorch.org/docs/stable/distributed.html
4、「init_process_group」: https://www.cnblogs.com/rossixyz/p/15553670.html
5、「DeepSpeed Megatron tutorial」: https://www.deepspeed.ai/tutorials/megatron/
6、「codegeex paper」: https://arxiv.org/abs/2303.17568