
一文详解点云库PCL
目标检测与深度学习
共 3561字,需浏览 8分钟
·
2021-04-21 09:37
一、介绍
二、架构和实施
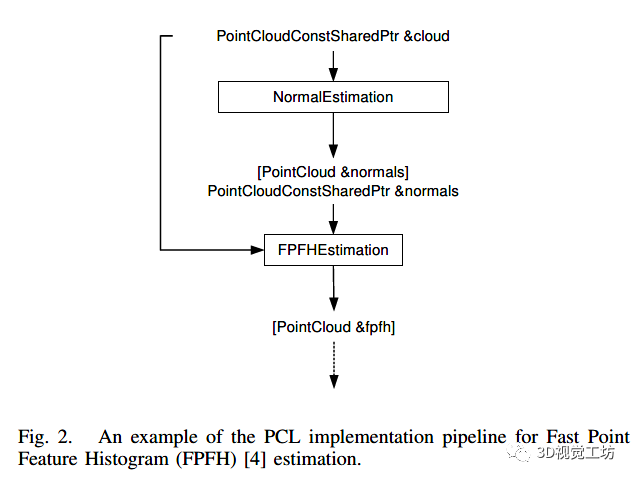
创建处理对象(例如,滤波器,特征估计器,分割); 使用setInputCloud传递输入点云数据集到处理模块; 设置一些参数; 调用计算(或滤波,分割等)得到输出。
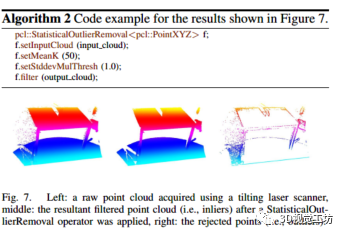
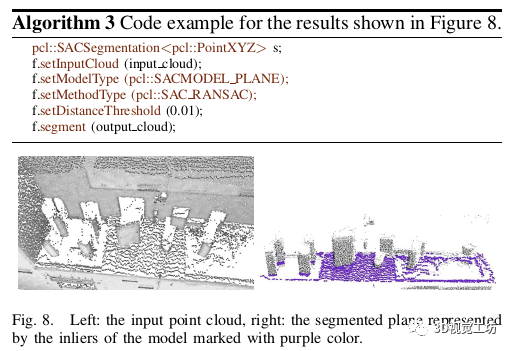
libpcl filters:实现采样、去除离群点、特征提取、拟合估计等过滤器; libpcl features:实现多种三维特征的筛选,如:曲面法线、曲率、边界点估计等; libpcl I/O:实现数据的输入和输出操作; libpcl surface:实现表面重建技术,如网格重建,凸包重建; libpcl registeration:实现点云配准方法,如ICP等; libpcl keypoints:实现不同的关键点提取方法; libpcl range image:实现支持不同点云数据集生成的范围图像。
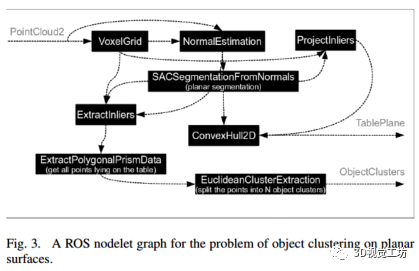
三、PCL和ROS
四、可视化
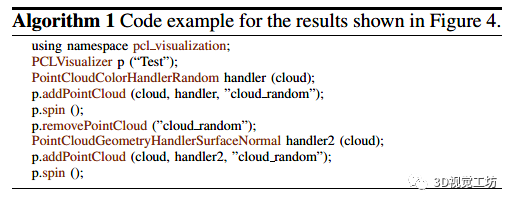
对所有n维点云数据集渲染和设置视觉属性的方法(颜色,点大小,不透明度等); 用点集或参数方程式的方法在屏幕上绘制基本3D形状的方法(例如,圆柱体,球体,线,多边形等); 用于2D绘制的直方图可视化模块(PCLHistogramVisualizer); 大量的几何和颜色处理程序。在这里,用户可以指定将什么尺寸用于3D笛卡尔空间中的点位置(见图4),或者应使用什么颜色来渲染点(见图5);
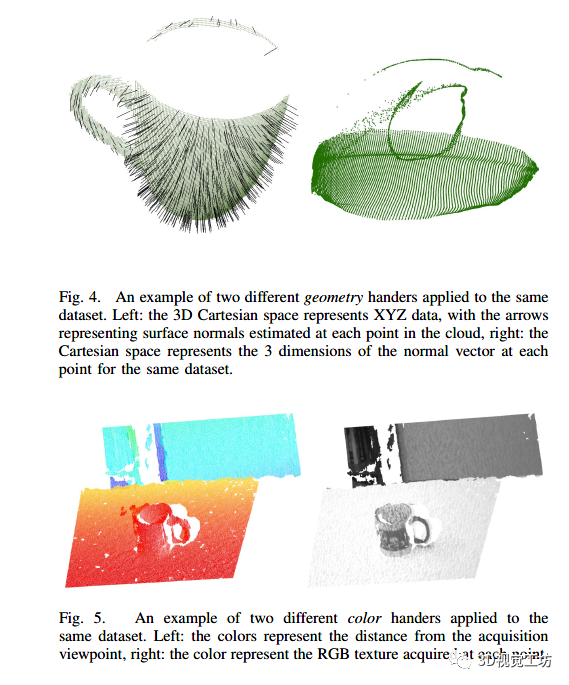
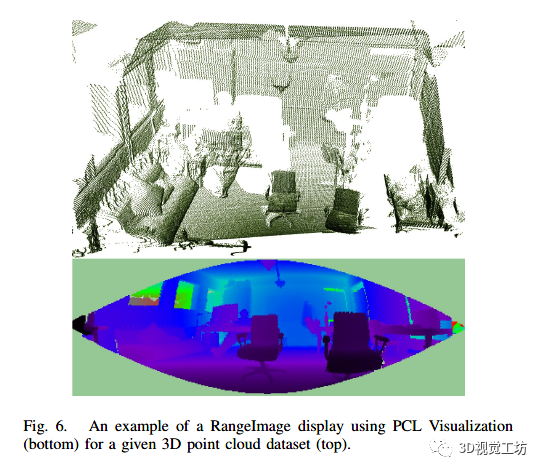
深度图可视化模块(见图6)。
五、使用范例
✄------------------------------------------------
双一流高校研究生团队创建,专注于计算机视觉原创并分享相关知识☞
闻道有先后,术业有专攻,如是而已╮(╯_╰)╭
评论