
基于Opencv的图像单应性转换实战
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

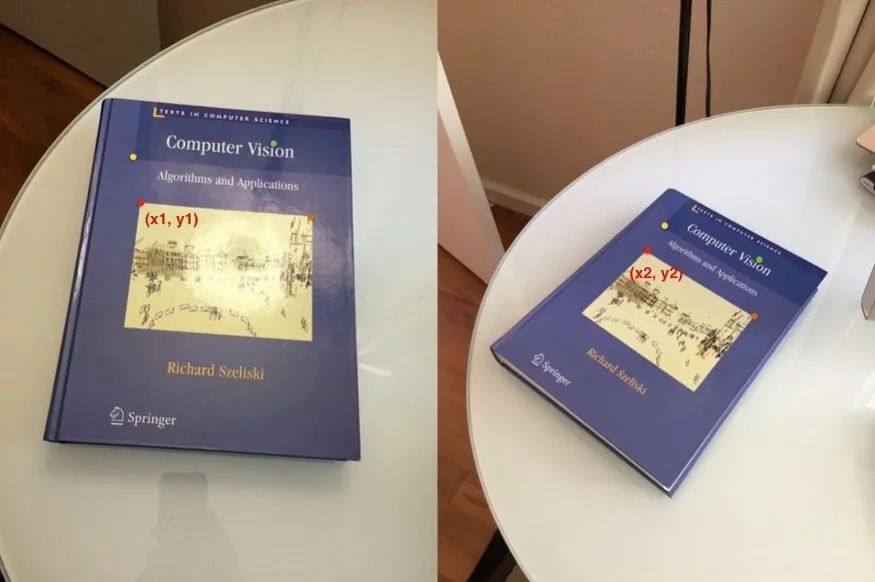
同形转换
我们所常见的都是以这样的方式来处理图像:检测斑点,分割感兴趣的对象等。我们如何将它们从一种形式转换为另一种形式来处理这些图像呢?通过单应矩阵快速转换图像可以实现这个需求。
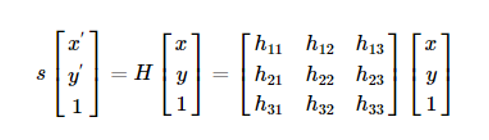
单应性,也被称为平面单应性,是两个平面之间发生的转换。换句话说,它是图像的两个平面投影之间的映射。它由同构坐标空间中的3x3转换矩阵表示。在数学上,同质矩阵表示为:
在坐标标平面上:
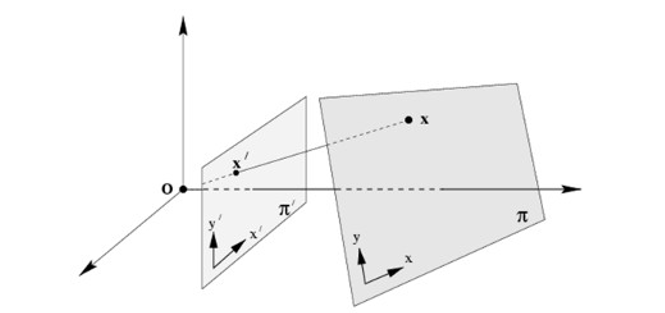
如图所示,图像中的元素在同一个坐标平面中投影到另一幅图像,保留了相同的信息,但具有变换的透视图。现在,让我们使用Python代码实现这一操作。与往常一样,在我们实际执行此操作之前。必须导入以下库:
from skimage.io import imread, imshowfrom skimage import transformimport matplotlib.pyplot as pltimport numpy as np
我们将在本文中使用多个图像。通过单击标题中嵌入的链接来下载图像。考虑一下这个棋盘:
chess = imread('chess.png')imshow(chess)

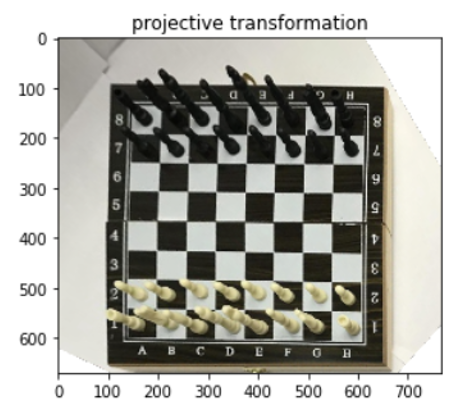
假设你们想改为看到木板及其零件的鸟瞰图。是否可以仅使用图像中的信息来做到这一点?在这种情况下,你们要做的就是找到木板的角并将其设置为原坐标。之后,在要进行单应性投影的同一图像中,选择要显示变换后的图像的目标坐标。该代码已实现:
#source coordinatessrc = np.array([391, 100,14, 271,347, 624,747, 298,]).reshape((4, 2))#destination coordinatessrc = np.array([100, 100,100, 650,650, 650,650, 100,]).reshape((4, 2))#using skimage’s transform module where ‘projective’ is our desired parametertform = transform.estimate_transform('projective', src, dst)tf_img = transform.warp(chess, tform.inverse)#plotting the transformed imagefig, ax = plt.subplots()ax.imshow(tf_img)_ = ax.set_title('projective transformation')
既然我们已经做到了,那么考虑到目标图像来自其他图像的情况,我们又如何处理另一个图像呢?让我们来看这个例子。考虑一下这张图像,一场篮球比赛。
still2 = imread('still2.png')imshow(still2)

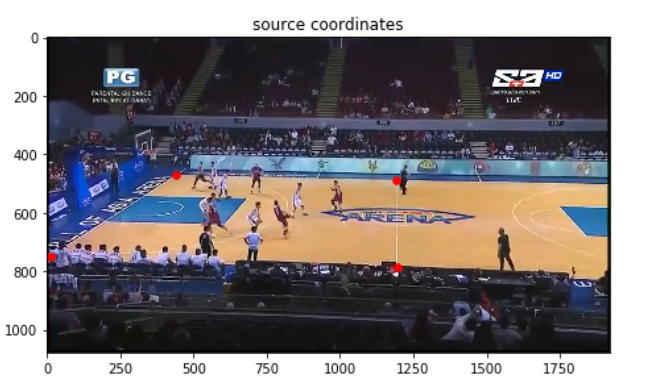
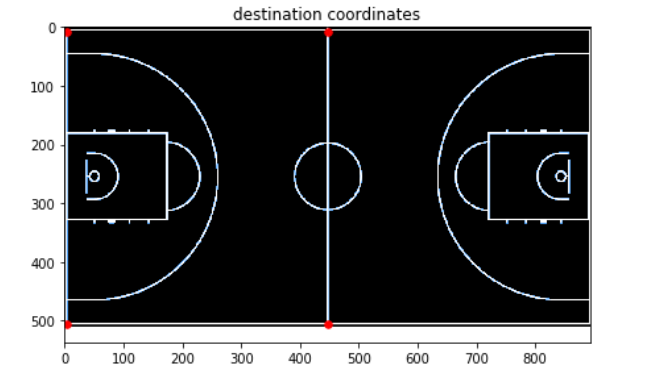
假设我们有兴趣通过单应性法改变球场的一半。首先,从上面的图像(即半场的角)确定原坐标。然后,从另一幅与上述图像完全不同的图像中找到我们的目的地坐标。我们正在谈论的另一个图像如下所示:
court = imread('court.png')plt.imshow(court)
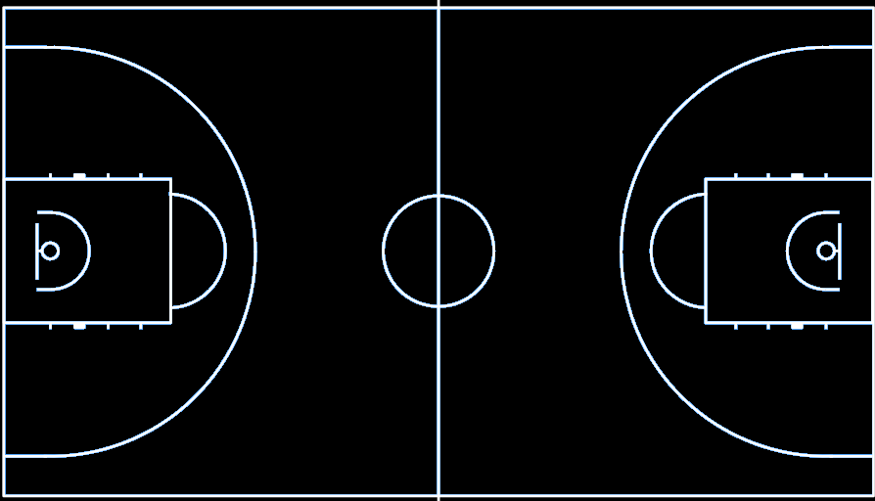
让我们通过代码实际看到这一点:
src_2 = np.array([440, 470,10, 750,1190, 490,1195, 785,]).reshape((4, 2))dst_2 = np.array([3, 7,3, 506,447, 7,447, 506,]).reshape((4, 2))fig, ax = plt.subplots(3, 1, figsize=(25, 15))ax[0].imshow(still2, )ax[0].scatter(src_2[:,0], src_2[:,1], c='red', s=30)ax[0].set_title('source coordinates')ax[1].imshow(court)ax[1].scatter(dst_2[:,0], dst_2[:,1], c='red', s=30)ax[1].set_title('destination coordinates')dst_2 = dst_2*2 #because image sizes are not the same.tform = transform.estimate_transform('projective', src_2, dst_2)tf_img = transform.warp(still2, tform.inverse)ax[2].imshow(tf_img)ax[2].scatter(dst_2[:,0], dst_2[:,1], c='red', s=10)
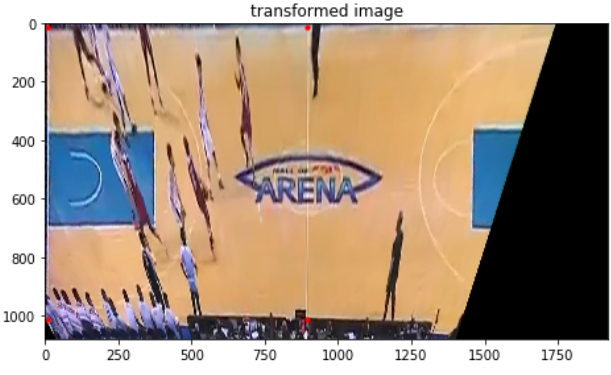
就这样利用单应矩阵来进行变换图像,现在,我们不仅可以从另一个角度来看待球场上的玩家,而且仍然保留了原始角度的相关信息。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~