
嵌入式Linux操作UART实例
1
引言
1
引言
2
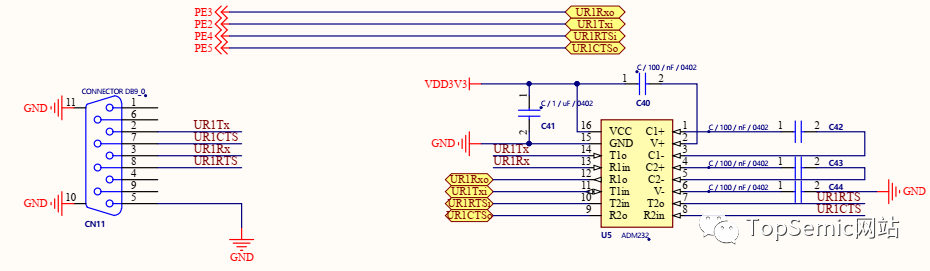
环境介绍
2
环境介绍
3
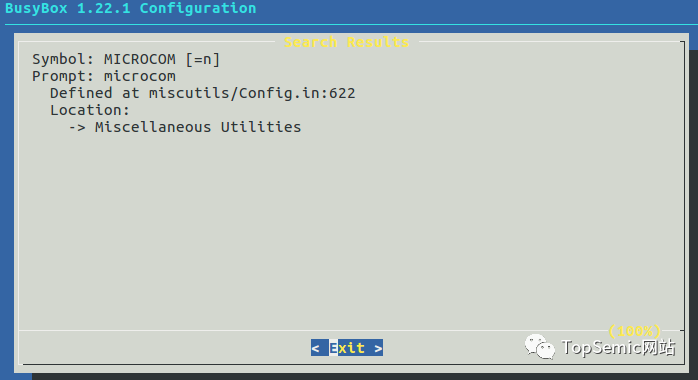
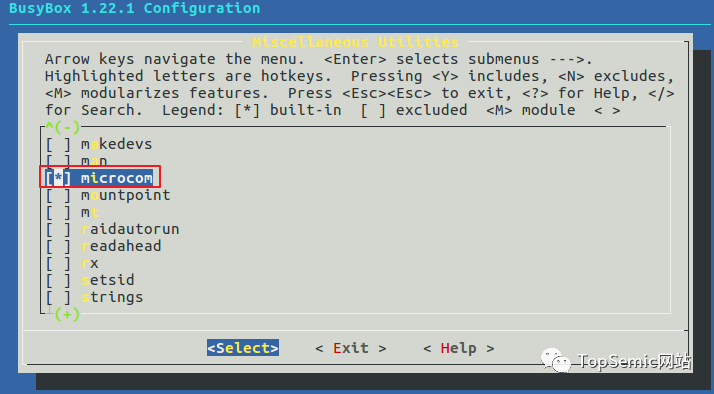
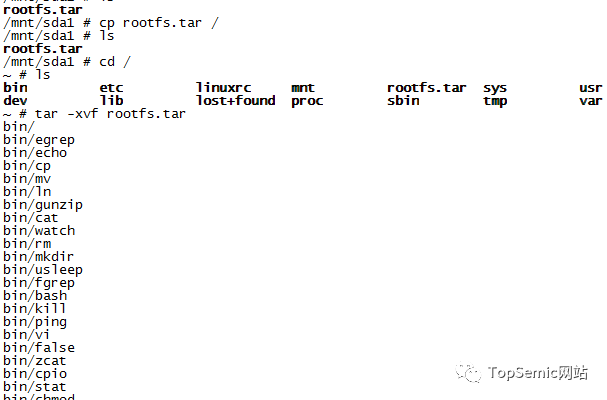
Busybox生成microcom命令
3
Busybox生成microcom命令

4
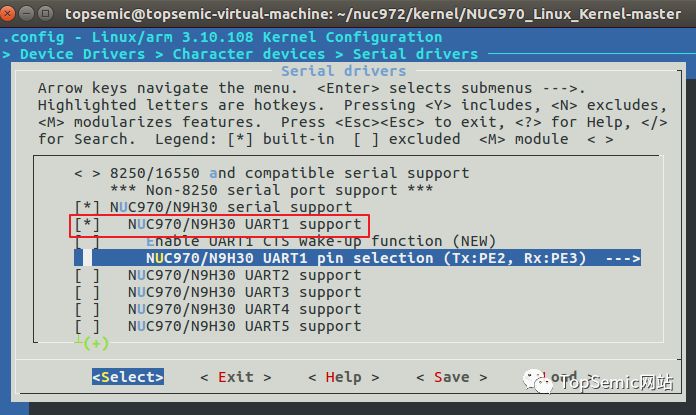
内核配置
4
内核配置
5
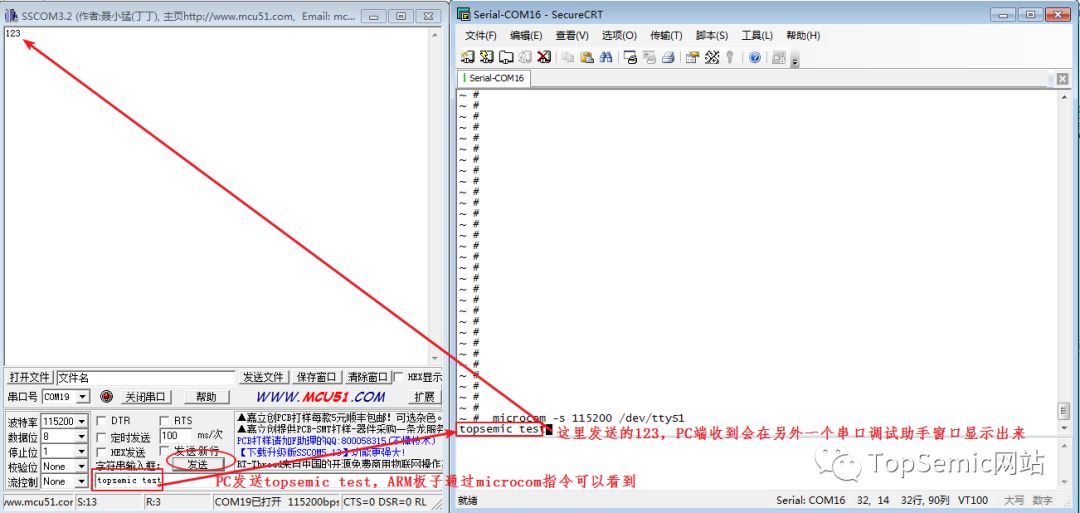
UART操作
5
UART操作



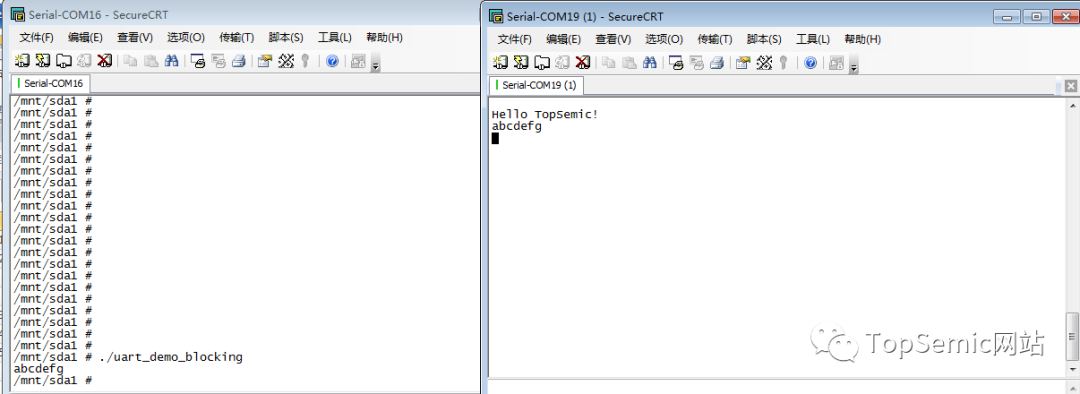
int main (int argc, char *argv[]){int fd;int len, i,ret;char buf[] = "Hello TopSemic! \n";fd = open(DEV_NAME, O_RDWR | O_NOCTTY);if(fd < 0){perror(DEV_NAME);return -1;}len = write(fd, buf, sizeof(buf));if (len < 0){printf("write data error \n");}memset(buf,0x00,sizeof(buf));len = read(fd, buf, sizeof(buf));if (len < 0){printf("read error \n");return -1;}printf("%s", buf);return(0);}
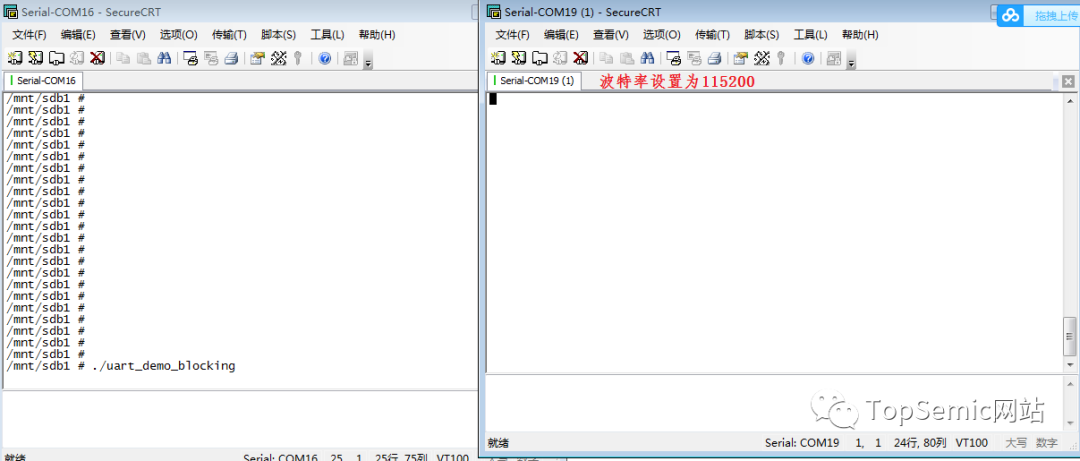
int main (int argc, char *argv[]){int fd;int len, i,ret;char buf[] = "Hello TopSemic! \n";fd = open(DEV_NAME, O_RDWR | O_NOCTTY|O_NDELAY);if(fd < 0){perror(DEV_NAME);return -1;}len = write(fd, buf, sizeof(buf));if (len < 0){printf("write data error \n");}while(1){memset(buf,0x00,sizeof(buf));len = read(fd, buf, sizeof(buf));printf("len:%d \n",len);if(len>0)printf("%s", buf);usleep(100000);}}
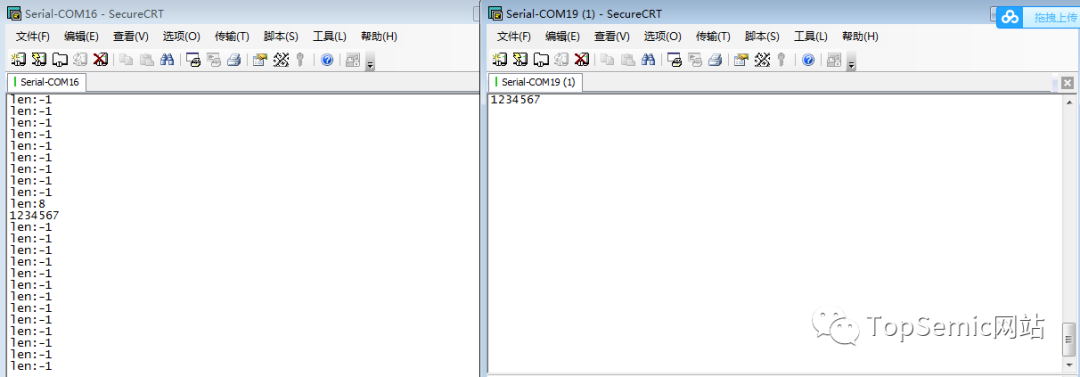
static struct termios newtios,oldtios; /*termianal settings */static int saved_portfd=-1; /*serial port fd */static void reset_tty_atexit(void){if(saved_portfd != -1){tcsetattr(saved_portfd,TCSANOW,&oldtios);}}/*cheanup signal handler */static void reset_tty_handler(int signal){if(saved_portfd != -1){tcsetattr(saved_portfd,TCSANOW,&oldtios);}_exit(EXIT_FAILURE);}static set_port_attr (int portfd,int baudrate){struct sigaction sa;/*get serial port parnms,save away */tcgetattr(portfd,&newtios);memcpy(&oldtios,&newtios,sizeof newtios);/* configure new values */cfmakeraw(&newtios); /*see man page */newtios.c_iflag |=IGNPAR; /*ignore parity on input */newtios.c_oflag &= ~(OPOST | ONLCR | OLCUC | OCRNL | ONOCR | ONLRET | OFILL);newtios.c_cc[VMIN]=1; /* block until 1 char received */newtios.c_cc[VTIME]=0; /*no inter-character timer */switch(baudrate) {case 9600:cfsetispeed(&newtios,B9600);cfsetospeed(&newtios,B9600);break;case 19200:cfsetispeed(&newtios,B19200);cfsetospeed(&newtios,B19200);break;case 38400:cfsetispeed(&newtios,B38400);cfsetospeed(&newtios,B38400);break;case 115200:cfsetispeed(&newtios,B115200);cfsetospeed(&newtios,B115200);break;}/* register cleanup stuff */atexit(reset_tty_atexit);memset(&sa,0,sizeof sa);sa.sa_handler = reset_tty_handler;sigaction(SIGHUP,&sa,NULL);sigaction(SIGINT,&sa,NULL);sigaction(SIGPIPE,&sa,NULL);sigaction(SIGTERM,&sa,NULL);/*apply modified termios */saved_portfd=portfd;tcflush(portfd,TCIFLUSH);tcsetattr(portfd,TCSADRAIN,&newtios);return portfd;}int main (int argc, char *argv[]){int fd;int len, i,ret;char buf[] = "Hello TopSemic! \n";fd = open(DEV_NAME, O_RDWR | O_NOCTTY|O_NDELAY);if(fd < 0){perror(DEV_NAME);return -1;}set_port_attr (fd,115200);len = write(fd, buf, sizeof(buf));if (len < 0){printf("write data error \n");}while(1){memset(buf,0x00,sizeof(buf));len = read(fd, buf, sizeof(buf));printf("len:%d \n",len);if(len>0)printf("%s", buf);usleep(100000);}return 0;}
6
结束语
6
结束语

评论