一文读懂常见的光学传感器原理

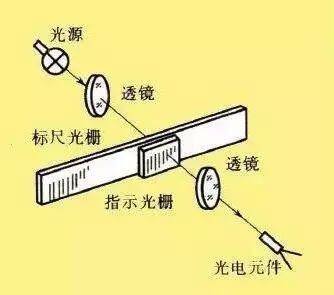
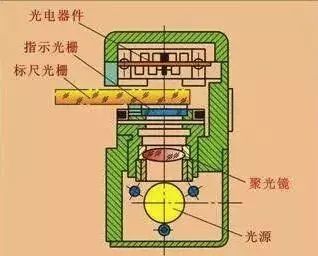
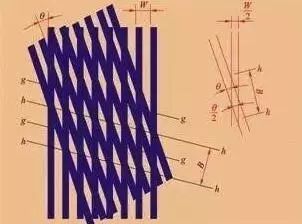
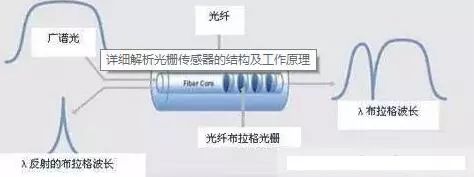
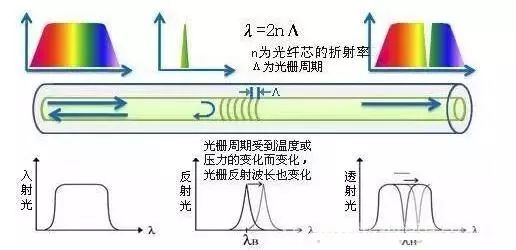
光栅传感器


红外传感器
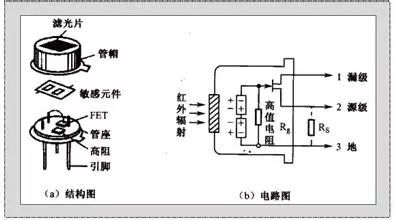
热释红外传感器

光纤陀螺仪传感器

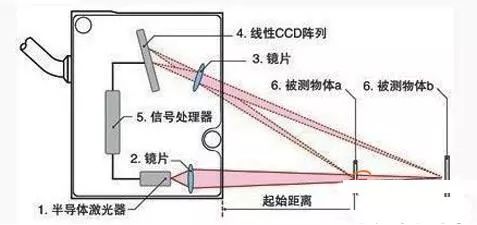
激光位移传感器
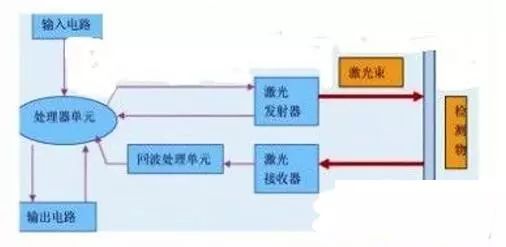
激光测距传感器

✄------------------------------------------------
双一流大学研究生团队创建,一个专注于目标检测与深度学习的组织,希望可以将分享变成一种习惯。
整理不易,点赞三连!
评论
 下载APP
下载APP光栅传感器
红外传感器
热释红外传感器
光纤陀螺仪传感器
激光位移传感器
激光测距传感器
✄------------------------------------------------
双一流大学研究生团队创建,一个专注于目标检测与深度学习的组织,希望可以将分享变成一种习惯。
整理不易,点赞三连!