实操教程 | 用于小目标检测的一个简单高效的网络
作者 | ronghuaiyang
来源 | AI公园
编辑 | 极市平台
极市导读
本文介绍一种以Tiny YOLOV3的速度达到YOLOV3的效果的网络。 >>加入极市CV技术交流群,走在计算机视觉的最前沿
1 介绍
本文提出一种专门用于检测小目标的框架,框架结构如下图:

我们探索了可以提高小目标检测能力的3个方面:Dilated模块,特征融合以及passthrough模块。
Dilated Module:上下文信息对于检测小目标是很重要的,一种方法是重复的上采样来恢复丢失的信息,同时下采样来扩大感受野。但是,这个过程中信息丢失是难免的,受dilated卷积的启发,我们提出了Dilated Module,在不损失分辨率的情况下,提升感受野。
特征融合:不同层的特征图包含不同的特征,浅层特征包含细节信息,深层特征包含语义信息,两者对于检测小目标都很重要,所以,对于不同的Dilated Module出来的特征图,我们进行拼接,全部用来检测小目标。
Passthrough Module:位置信息对于小目标也是至关重要的,我们提出了Passthrough Module从结合浅层特征图和深层特征图一起得到准确的位置信息。本文的主要贡献:
(1)提出了Dilated Module来扩大感受野,提出了Passthrough Module来利用上下文信息和小目标的位置信息。考虑到小目标的特点,用特征融合来同时获取细节特征和语义信息,为了模型加速,使用了1x1卷积来降维。
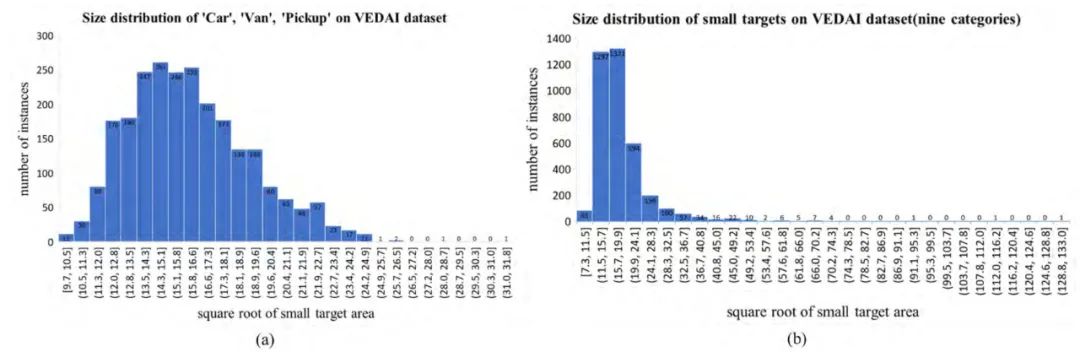
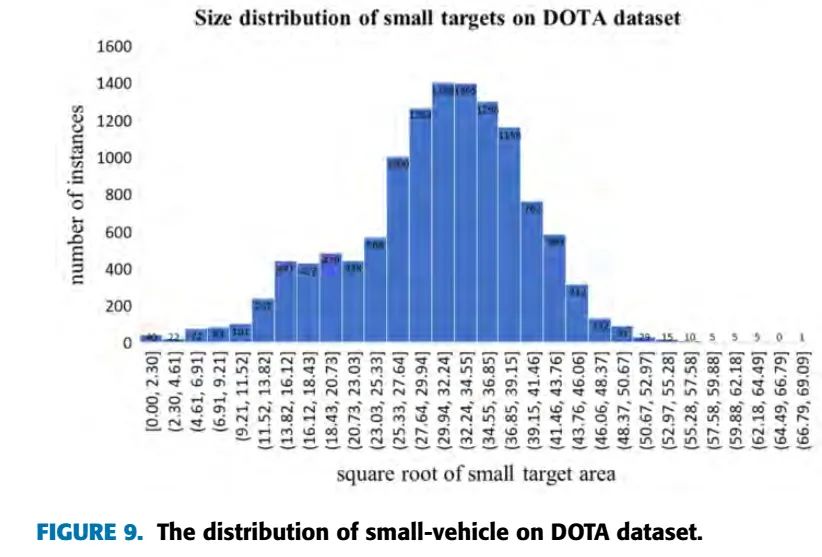
(2)基于VEDAI数据集和DOTA 数据集,我们制作了一个small vehicle数据集,同时,分析了每个数据集的分布。
(3)我们在VEDAI数据集和DOTA 数据集上进行了训练和评估,结果表明,我们的网络非常的简单,快速和高效。
2 方法
2.1 DILATED模块
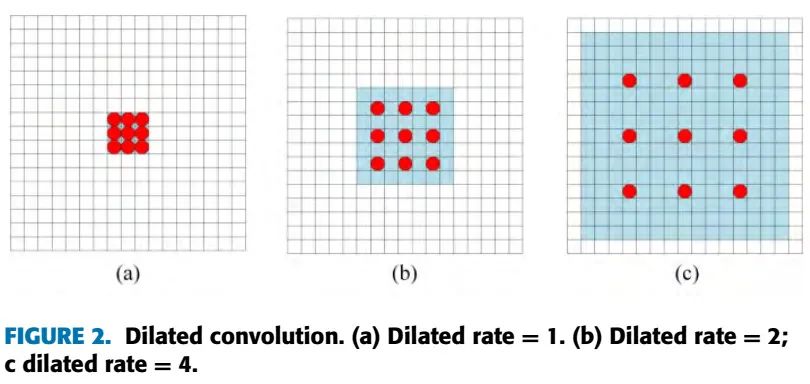
使用Dilated卷积可以在不降低分辨率的情况下,指数的增加感受野,如图2所示:
 我们使用Dilated卷积作为基本单元,构建Dilated Module,为了重复使用之前层的特征,我们把之前层的特征通过拼接合并起来,然后使用1x1的卷积来降维,模块结构如下:
我们使用Dilated卷积作为基本单元,构建Dilated Module,为了重复使用之前层的特征,我们把之前层的特征通过拼接合并起来,然后使用1x1的卷积来降维,模块结构如下: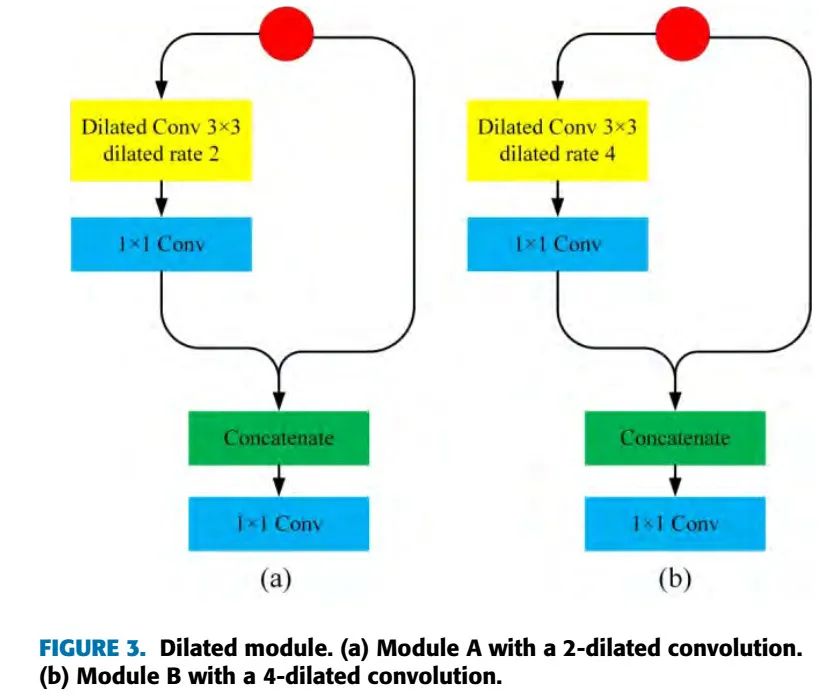
2.2 PASSTHROUGH模块
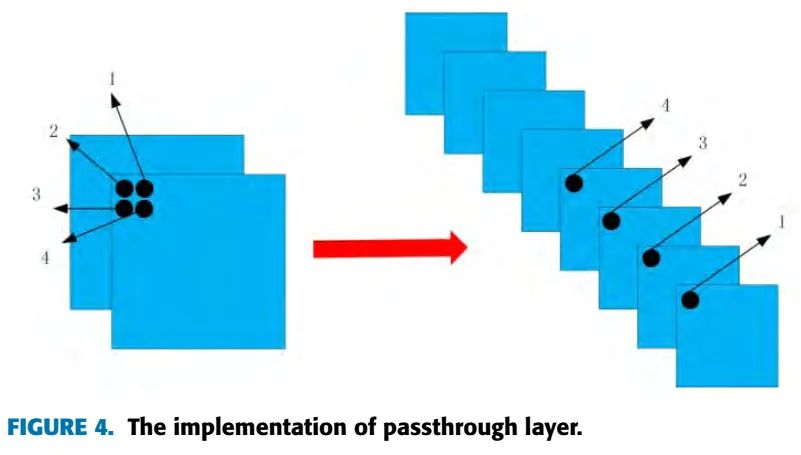
为了可以利用到之前的层的信息,我们使用了stride为2的passthrough层,这个passthrough层将特征图从2N×2N×C转换为N×N×4C,过程如图4,左边是passthrough层的输入,右边是passthrough层的输出:
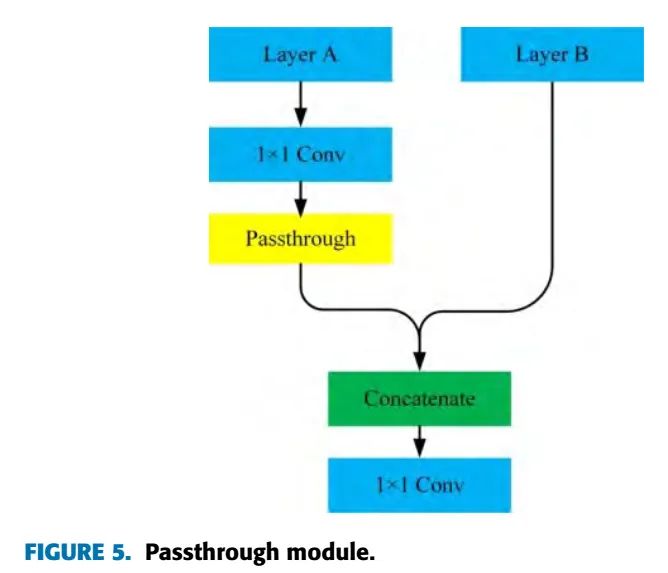
我们使用passthrough层作为基本单元,构建了passthrough module,具体结构见图5,LayerA表示之前的层,LayerB表示当前的更深一点的层:
2.3 特征融合
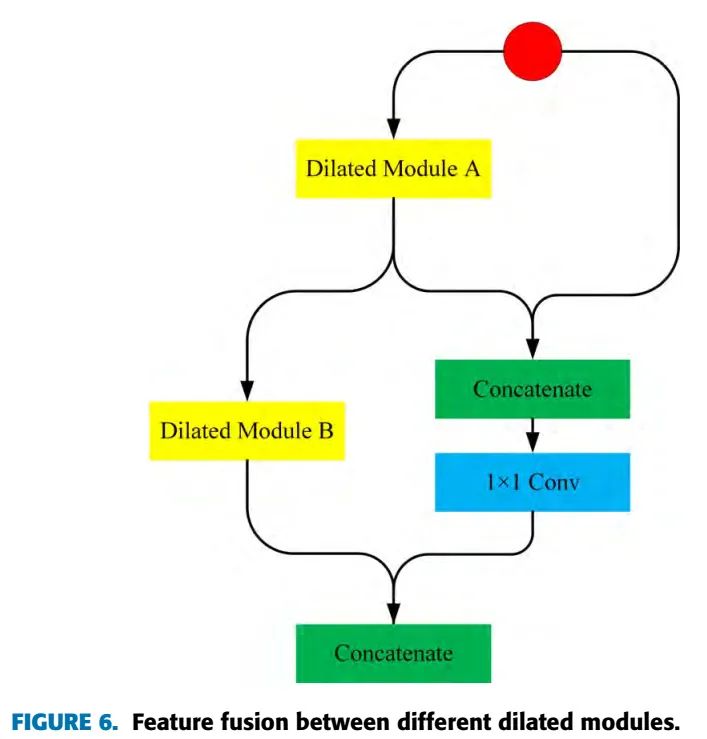
本文使用拼接的方式来融合浅层特征和深层特征,框架里有2种特征融合的方法,一种是在不同的Dilated Module之间进行特征融合,此时,特征图的分辨率是相同的,直接拼接就可以。见图6。还有一种是类似passthrough module,中间有降采样的过程,特征图的分辨率已经改变了,如果要拼接的话,就需要进行通过passthrough层或者上采样层。这里选用了passthrough层来进行融合。
2.4 网络结构
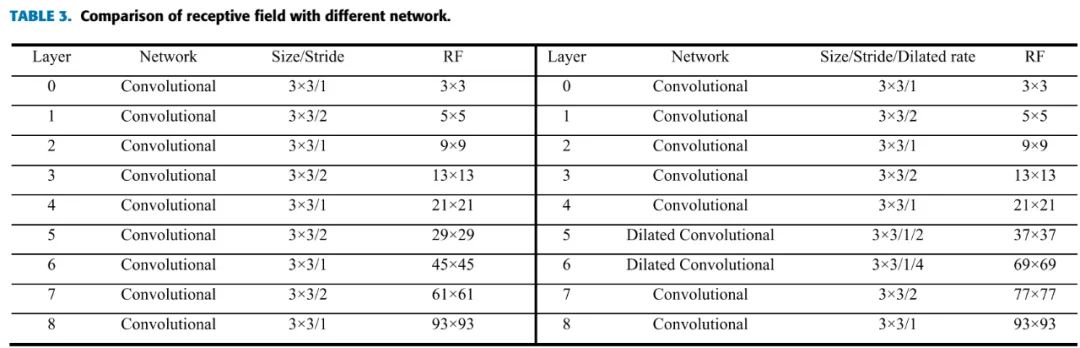
我们这个网络的目标是检测小目标,太多的下采样层对于检测小目标并不好,但是,下采样层的个数又直接影响到感受野的大小。所以,这里,我们使用了2个dilated模块(Dilated module A 和 Dilated module B ),特征图下采样2次,然后和使用passthrough module下采样3次的特征图进行融合,为了加速,每次拼接之后,使用1x1卷积进行降维。最后一层进行结果的预测,尺寸为,这里,为每个网格点预测的框的数量,默认是3。感受野的计算公式:
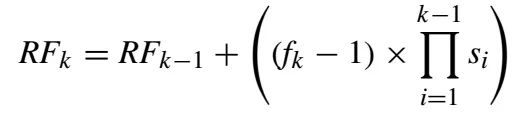
如表3所示,使用了2个Dilated卷积的网络,只下采样3次,感受野和下采样4次的网络一样。
3 实验
我们分析了VEDAI数据集和DOTA 数据集的数据分布:
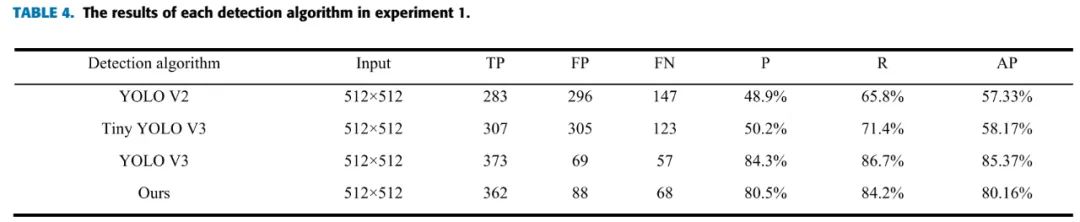
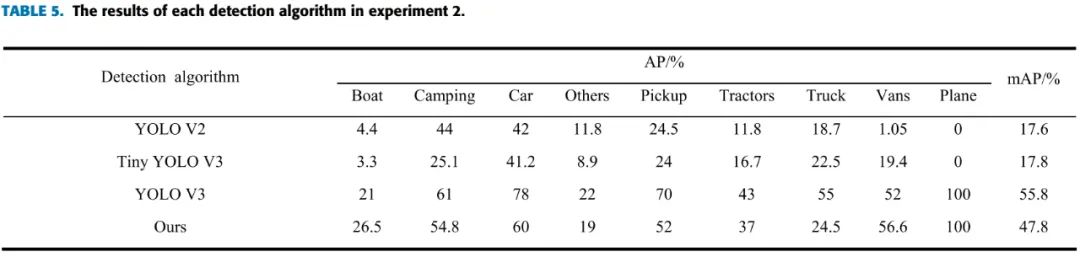
在VEDAI数据集上,设计了2种实验,实验1是将‘car’, ‘pick-up’和 ‘van’ 合并成了1个类别,实验2是使用了原来的9个类别,结果如下,结果明显好于YOLOv2和Tiny YOLOv3,但是低于YOLOv3:
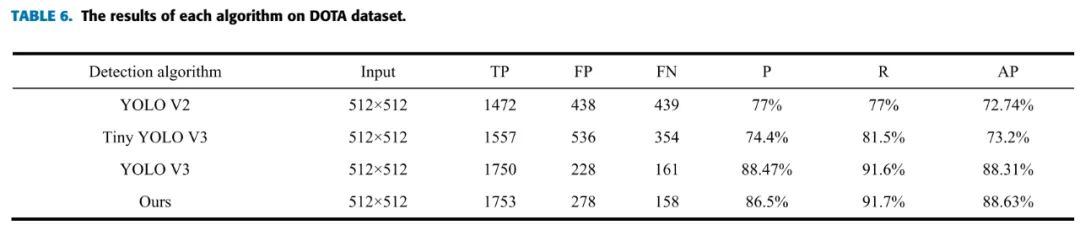
在DOTA数据集上的比较:
不同网络的速度的比较:
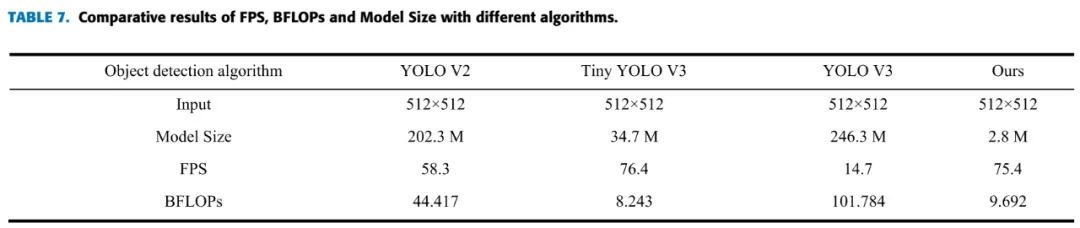
可以看到,模型速度和Tiny YOLOv3相当,准确率大大超过Tiny YOLOv3,仅仅比YOLOv3略低。
如果觉得有用,就请分享到朋友圈吧!
公众号后台回复“CVPR21检测”获取CVPR2021目标检测论文下载~

# CV技术社群邀请函 #

备注:姓名-学校/公司-研究方向-城市(如:小极-北大-目标检测-深圳)
即可申请加入极市目标检测/图像分割/工业检测/人脸/医学影像/3D/SLAM/自动驾驶/超分辨率/姿态估计/ReID/GAN/图像增强/OCR/视频理解等技术交流群
每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度等名校名企视觉开发者互动交流~