
彻底搞懂视觉-惯性SLAM:基于VINS-Fusion(正式开课)


自动驾驶和服务机器人行业增速明显,自2021年以来,多家公司开始逐步落地自己的L2~L4级别的辅助/自动驾驶产品(无人出租车或者配送机器人),如百度、滴滴、美团、华为、特斯拉、Waymo等。其中,基于视觉传感器和惯性传感器的同时定位与建图技术(SLAM)是该领域的核心技术之一,各大公司均有相关在招岗位。由于视觉-惯性SLAM对从业者的理论和代码要求都很高,导致行业人才供小于求,许多公司更是不惜重金招聘一个合格的SLAM算法工程师,并且薪资待遇极其丰厚。以下是某照片网站对SLAM相关职位的要求和待遇:


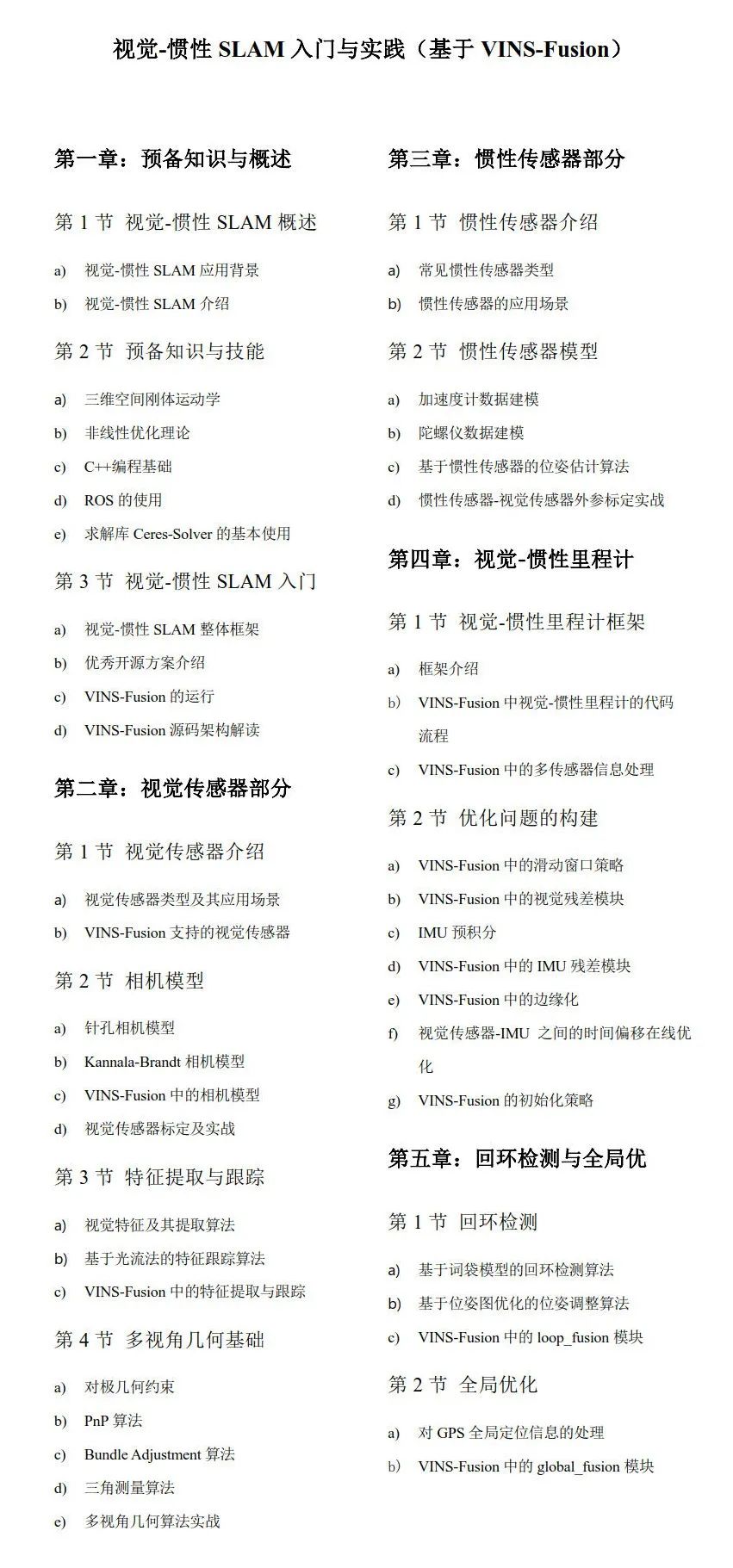
 视觉SLAM由于成本低,单目/双目结合多传感器的方案越来越受青睐,而视觉惯性里程计更是多传感融合方案的佼佼者;其中,最著名的方案当属VINS-Fusion(VINS-Mono的扩展版)。VINS-Fusion是香港科技大学于2019年开源的视觉-惯性SLAM系统,KITTI Visual Odometry 榜单中排名最靠前的开源双目 VO 方案,主要支持:单目+IMU、纯双目、双目+IMU、双目+IMU+GPS,是一个可以用于室外场景中无人车辆/机器人自主定位的优秀方案,以下是官方测试效果展示:
视觉SLAM由于成本低,单目/双目结合多传感器的方案越来越受青睐,而视觉惯性里程计更是多传感融合方案的佼佼者;其中,最著名的方案当属VINS-Fusion(VINS-Mono的扩展版)。VINS-Fusion是香港科技大学于2019年开源的视觉-惯性SLAM系统,KITTI Visual Odometry 榜单中排名最靠前的开源双目 VO 方案,主要支持:单目+IMU、纯双目、双目+IMU、双目+IMU+GPS,是一个可以用于室外场景中无人车辆/机器人自主定位的优秀方案,以下是官方测试效果展示:
几种方案效果对比
课程优势
2021年8月29日正式开课,历时三个月,每两周更新一次,具体时间以学习群内公告为主。
点击购买与咨询
群号:910070197
▲课程咨询QQ群,了解更多
评论