
CV中的Attention机制:简单而有效的CBAM模块
极市导读
1. 什么是注意力机制?
通道注意力机制:对通道生成掩码mask,进行打分,代表是senet, Channel Attention Module 空间注意力机制:对空间进行掩码的生成,进行打分,代表是Spatial Attention Module 混合域注意力机制:同时对通道注意力和空间注意力进行评价打分,代表的有BAM, CBAM
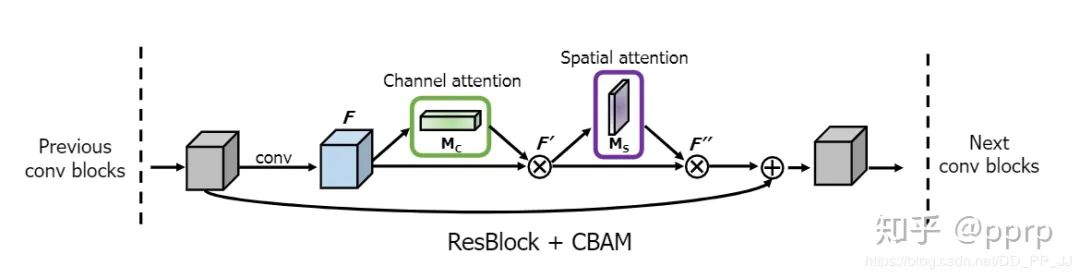
2. CBAM模块的实现
2.1 通道注意力机制
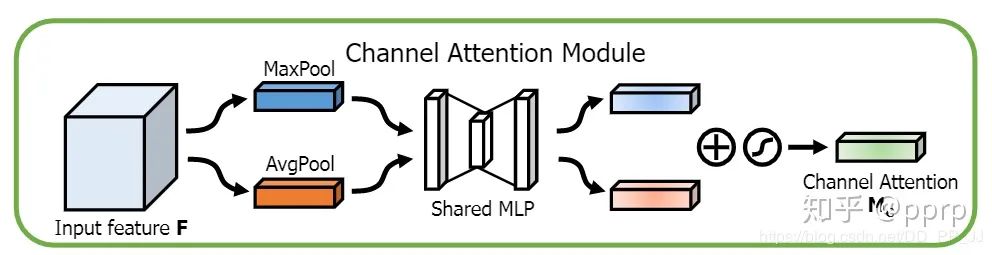
class ChannelAttention(nn.Module):def __init__(self, in_planes, rotio=16):super(ChannelAttention, self).__init__()self.avg_pool = nn.AdaptiveAvgPool2d(1)self.max_pool = nn.AdaptiveMaxPool2d(1)self.sharedMLP = nn.Sequential(nn.Conv2d(in_planes, in_planes // ratio, 1, bias=False), nn.ReLU(),nn.Conv2d(in_planes // rotio, in_planes, 1, bias=False))self.sigmoid = nn.Sigmoid()def forward(self, x):avgout = self.sharedMLP(self.avg_pool(x))maxout = self.sharedMLP(self.max_pool(x))return self.sigmoid(avgout + maxout)
2.2 空间注意力机制
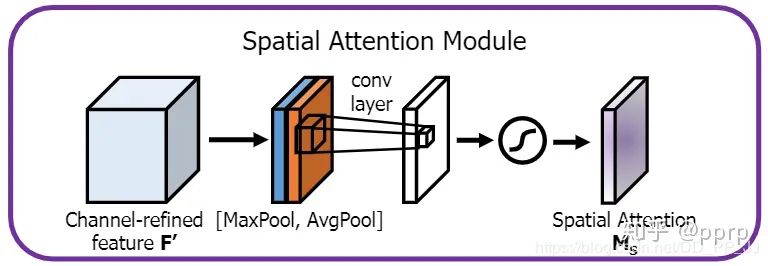
class SpatialAttention(nn.Module):def __init__(self, kernel_size=7):super(SpatialAttention, self).__init__()assert kernel_size in (3,7), "kernel size must be 3 or 7"padding = 3 if kernel_size == 7 else 1self.conv = nn.Conv2d(2,1,kernel_size, padding=padding, bias=False)self.sigmoid = nn.Sigmoid()def forward(self, x):avgout = torch.mean(x, dim=1, keepdim=True)maxout, _ = torch.max(x, dim=1, keepdim=True)x = torch.cat([avgout, maxout], dim=1)x = self.conv(x)return self.sigmoid(x)
2.3 Convolutional bottleneck attention module
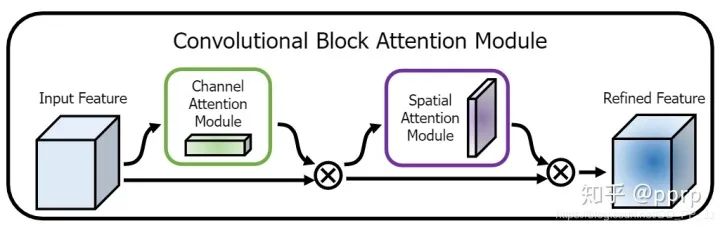
class BasicBlock(nn.Module):expansion = 1def __init__(self, inplanes, planes, stride=1, downsample=None):super(BasicBlock, self).__init__()self.conv1 = conv3x3(inplanes, planes, stride)self.bn1 = nn.BatchNorm2d(planes)self.relu = nn.ReLU(inplace=True)self.conv2 = conv3x3(planes, planes)self.bn2 = nn.BatchNorm2d(planes)self.ca = ChannelAttention(planes)self.sa = SpatialAttention()self.downsample = downsampleself.stride = stridedef forward(self, x):residual = xout = self.conv1(x)out = self.bn1(out)out = self.relu(out)out = self.conv2(out)out = self.bn2(out)out = self.ca(out) * out # 广播机制out = self.sa(out) * out # 广播机制if self.downsample is not None:residual = self.downsample(x)out += residualout = self.relu(out)return out
class cbam(nn.Module):def __init__(self, planes):self.ca = ChannelAttention(planes)# planes是feature map的通道个数self.sa = SpatialAttention()def forward(self, x):x = self.ca(out) * x # 广播机制x = self.sa(out) * x # 广播机制
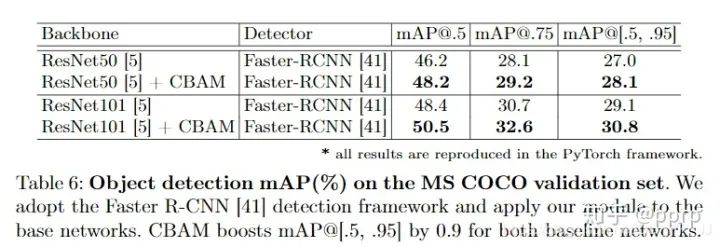
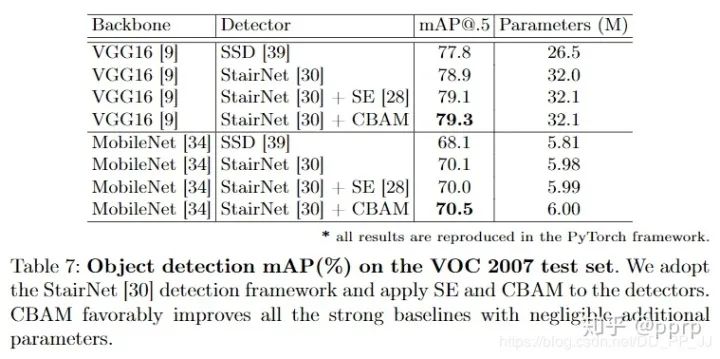
3. 在什么情况下可以使用?
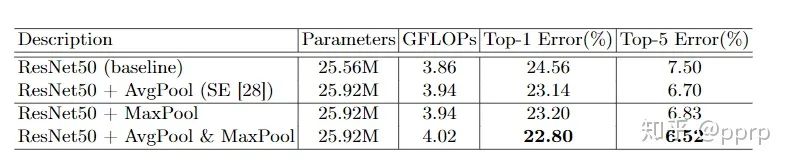
如何更有效地计算channel attention?
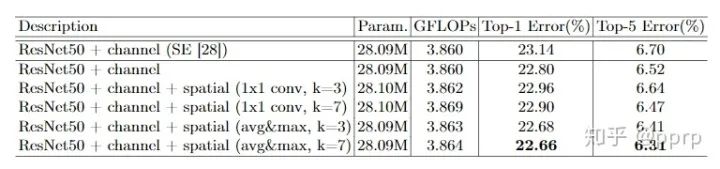
如何更有效地计算spatial attention?
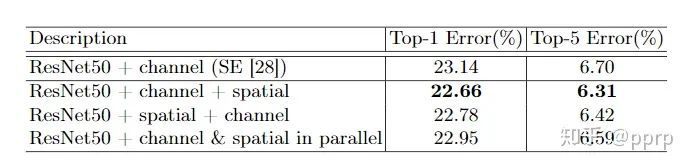
如何组织这两个部分?
4. 参考
推荐阅读
评论