
收藏 | 基于深度学习的图像匹配技术一览

应用:
方法:
分类:
Part1:局部不变特征点匹配-2D
关键点:指特征点在图像中的位置,具有方向、尺度等信息;
描述子:描述子通常是一个向量,描述关键点邻域的像素信息。
在向量空间对两个描述子进行比较,距离相近则判定为同一个特征点。 角点、边缘点等都可以作为潜在特征点: SIFT总结【5】:许允喜等,对局部图像描述符进行分析描述,对这类方法的计算复杂度、评价方法和应用领域予以总结。 SIFT总结【4】:刘立等,对 SIFT 算法的演变以及在不同领域的典型应用进行了较为全面的论述,并比较了各类算法的优缺点。 SIFT算法改进【9】【10】【11】:针对算法时间复杂度高,PCA-SIFT, SURF, SSIF。 SIFT算法改进【12】:对彩色图 像进行处理的 CSIFT( colored SIFT)。 SIFT算法改进【13】:使用对数极坐标分级结构的 GLOH( gradient location and orientation histogram)。 SIFT算法改进【14】:具有仿射不变性的ASFIT( affine SIFT)。 Fast【2】:通过邻域像素对比进行特征点检测并引入机器学习加速这一过程,可应用在对实时性要求较高的场合,如视频监控中的目标识别。由于 FAST 仅处理单一尺度图像,且检测的不仅仅是“角点”这一特征,还可以检测到其他符合要求的特征点,如孤立的噪点等。当图像中噪点较多时会产生较多外点,导致鲁棒性下降。 Harris【1】:通过两个正交方向上强度的变化率对角点进行定义,其本身存在尺度固定、像素定位精度低、伪角点较多和计算量大等问题。 Harris改进算法【6】:将多分辨率思想引入 Harris 角点,解决了Harris算法不具有尺度变化的问题。 Harris改进算法【7】:在 Harris 算法中两次筛选候选点集,利用最小二乘加权距离法实现角点亚像素定位,大幅度提高角点检测效率和精度。 Harris改进算法【8】:将灰度差分及模板与 Harris 算法相结合,解决了 Harris 算法中存在较多伪角点和计算量大等问题。 角点检测算法 - 最常用:基于图像灰度的方法。 邻域像素检测。 SIFT【3】:不再局限于对角点检测。
FAST-ER算法【15】:把特征点检测器定义为一种检测高重复点的三元决策树,并采用模拟退火算法对决策树进行优化,从而提高检测重复率。由于在每次迭代过程中,都需要对重新应用的新决策树进行检测,且其性能受到初始关键点检测器的限制,降低了该算法的鲁棒性。
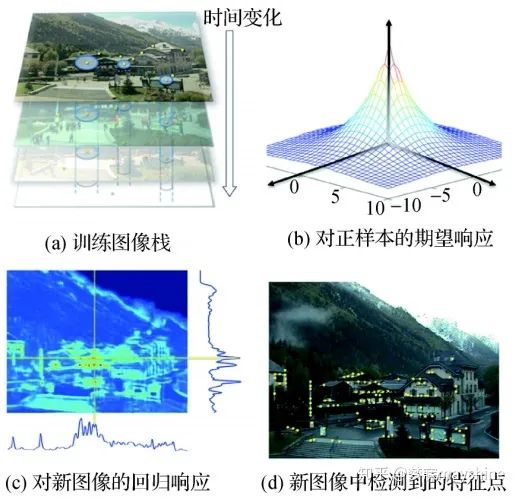
时间不变特征检测器( TILDE) 【16】:Verdie等人提出,能够较好地对由天气、季节、时间等因素引起的剧烈光照变化情况下的可重复关键点进行检测。参与训练的候选特征点是由多幅训练图像中采用 SIFT 算法提取的可重复关键点组成,如图a;正样本是以这些点为中心的区域,负样本是远离这些点的区域。在进行回归训练时,正样本 在特征点位置返回最大值,远离特征点位置返回较小值,如图 b ; 回归测试时,将测试图像分成固定大小的图像块,其回归响应如图c ,然后根据非极大值抑制提取特征点,如图d 。该方法适用于处理训练数据和测试数据为同一场景的图像。(TILDE 采用手动标记的数据作为区分性特征训练,使用DOG-difference of Gaussian收集训练集,对于跨模态任务如RGB/深度模态对不再适用)
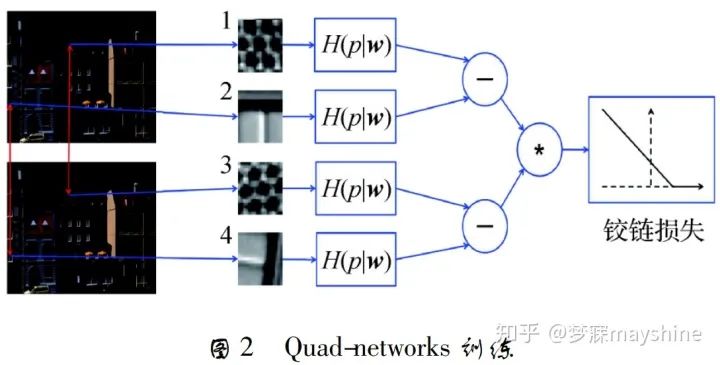
基于学习的协变特征检测器【17】:综合考虑两个局部特征检测器特性(检测可区分的特征;协变约束-在不同的变换下重复检测一致特征),Zhang 等人提出。该方法将 TILDE 的输出作为候选标准图像块,通过变换预测器的训练建立学习框架,将局部特征检测器的协变约束转化为变换预测器的协变约束,以便利用回归( 如深度神经网络) 进行变换预测。预测的变换有两个重要性质: 1) 变换的逆矩阵能将观察到的图像 块映射到“标准块”,“标准块”定义了具有可区分性的图像块以及块内“典型特征”( 如单位圆) 的位置和形状; 2) 将变换应用到“典型特征”可以预测图像 块内变换特征的位置和形状。 Quadnetworks【18】:采用无监督学习方式进行特征点检测。Savinov 等人提出,该方法将关键点检测问题转化为图像变换上的关键点一致性排序问题,优化后的排序在不同的变换下具有重复性,其中关键点来自响应函数的顶/底部分位 数。Quad-networks 的训练过程如图所示,在两幅图像中提取随机旋转像块对( 1,3) 和( 2,4) ; 每个块 经过神经网络输出一个实值响应 H( p w) ,其中 p 表示点,w 表示参数向量; 通过四元组的排序一致函数计算铰链损失,并通过梯度下降法优化。Quadnetworks 在 RGB/RGB模式和RGB/深度模式的重复检测性能均优于 DOG,可以和基于学习的描述符 相结合进行图像匹配,还可用于视频中的兴趣帧检测。
用于特征点描述符判别学习的 DeepDesc【19】:Simo-Serra 等人提出,该方法采用 Siamese 网络侧重训练难以区分类别的样本,输入图像块对,将 CNN 输出的非线性映射作为描述符,采用欧氏距离计算相似性并最小化其铰链损失。该方法适用于不同的数据集和应用,包括宽基线图像匹配、非刚性变形和极端光照变化的情况,但该方法需要大量的训练数据来保证其鲁棒性。
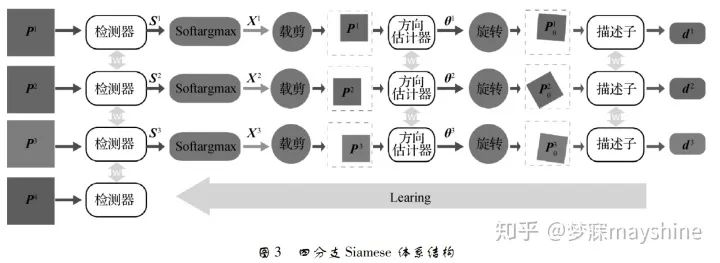
Yi 等人提出【20】:基于学习的不变特征变换( LIFT) 结合空间变换网络【21】和 Softargmax 函数,将基于深度学习的特征点检测【16】、基于深度学习的方向估计【22】和基于深度学习的描述符【19】连接成一个统一网络,从而实现完整特征点匹配处理流水线。其中图像块的裁剪和旋转通过空间变换网络实现,训练阶段采用四分支 Siamese 网络,输入特征点所在图像块,其位置和方向均来自 SFM 算法的输出,其中 P1 和 P2 为同一3D点在不同视角下的图像,P3 为不同3D点的投影的图像块,P4 为不包含任何特征点的图像快,S 为得分图,x 代表特征点位置。采用从后至前的训练策略,即先训练描述子,再训练方向估计,最后训练特征点检测。测试阶段,将特征点检测与方向估计及描述子分开,使优化问题易于处理。LIFT 方法的输入为多尺度图像,以滑窗形式进行特征点检测,提取局部块逐个分配方向,再计算描述子。与 SIFT 相比,LIFT 能够提取出更为稠密的特征点,且对光照和季节变化具有很高的鲁棒性。
经 典 SIFT 流方法【23】:提出不同场景的稠密对应概念,通过平滑约束和小位移先验计算不同场景间的稠密对应关系。 Bristow 等人【24】:将语义对应问题转化为约束检测问题,并提出Examplar-LDA( Examplar linear discriminant analysis) 分类器。首先对匹配图像中的每个像素学习一个 Examplar-LDA 分类器,然后以滑动窗口形式将其应用到目标图像,并将所有分类器上的匹配响应与附加的平滑先验结合,从而获得稠密的对应估计。该方法改善了语义流的性能,在背景杂乱的场景下具有较强鲁棒性。
Novotny 等人【25】:提出基于几何敏感特征的弱监督学习方法AnchorNet。在只有图像级标签的监督下,AnchorNet 依赖一组从残差超列 HC( hypercolumns) 中提取具有正交响应的多样过滤器,该过滤器在同一类别的不同实例或两个相似类别之间具有几何一致性。AnchorNet 通过在 ILSVRC12 ( imagenet large scale visual recognition competition 2012) 上预先训练的深度残差网络( ResNet50) 模型初始化网络参数,并采用两阶段优化与加速训练完成匹配。
对象类模型重建【26】 自动地标注释【27】 Wang 等人【28】:将多图像间的语义匹配问题转化为特征选择与标注问题,即从每幅图像的初始候选集中选择一组稀疏特征点,通过分配标签建立它们在图像间的对应关系。该方法可以为满足循环一致性和几何一致性的图像集合建立可靠的特征对应关系,其中循环一致性可以对图像集合中的可重复特征进行选择和匹配。低秩约束用于确保特征对应的几何一致性,并可同时对循环一致性和几何一致性进行优化。该方法具有高度可扩展性,可以对数千幅图像进行匹配,适用于在不使用任何注释的情况下重构对象类模型。
Yu 等人[29]提 出 A-NSIFT( accelerated multi-dimensional scale invariant feature transform) 与 PO-GMMREG( parallel optimization based on gaussian mixture model registration) 相结合的方法,改进了特征提取和匹配过程。ANSIFT 为加速版 NSIFT,采用 CUDA 编程加速 NSIFT 的前两个步骤,用于提取匹配图像和待匹配图像中的特征点( 仅保留位置信息) 。PO-GMMREG 是基于并行优化的高斯混合模型( GMM) 匹配算法,并行优化使得匹配图像和待匹配图像可以任意旋转角度对齐。该方法可以减少时间消耗,提高大姿态差异下的匹配精度。 TV-L1 ( total variation-L1 ) 光流模型[30]能有效地保持图像边缘等特征信息,但对于保持具有弱导数性质的纹理细节信息仍不够理想。 张桂梅等人[31]将 G-L ( Grünwald-Letnikov ) 分数阶微分理论引入TV-L1 光流模型,代替其中的一阶微分,提出分数阶 TV-L1 光流场模型 FTV-L1 ( fractional TV-L1 ) 。同时给出匹配精度和 G-L 分数阶模板参数之间关系,为最佳模板选取提供依据。FTV-L1 模型通过全变分能量方程的对偶形式进行极小化以获得位移场,可以解决图像灰度均匀,弱纹理区域匹配结果中的信息模糊问题。该方法能有效提高图像匹配精度,适合于包含较多弱纹理和弱边缘信息的医学图像匹配。 为了解决待匹配图像对中目标的大形变和灰度分布呈各向异性问题,陆雪松等人[32]将两幅图像的 联合 Renyi α -entropy 引入多维特征度量并结合全局和局部特征,从而实现非刚性匹配。首先,采用最小距离树构造联合Renyi α -entropy 度量准则;其次,根据该度量相对形变模型 FFD( free-form deformation) 的梯度解析表达式,采用随机梯度下降法进行优化; 最后,将图像的 Canny 特征和梯度方向特征融入度量中,实现全局和局部特征的结合。该方法的匹配精度与传统互信息法和互相关系数法相比有明显提高,且新度量方法能克服因图像局部灰度分布不一致造成的影响,能够在一定程度上减少误匹配。 Yang 等人[33] 提出的 FMLND( feature matching with learned nonlinear descriptors) 采用基于学习的局部非线性描述符 LND 进行特征匹配,对来自 T1w 和 T2w 两种不同成像参数的磁共振成像( MRI) 数据的 CT( computed tomography) 图像进行预测。该过程分为两个阶段: 学习非线性描述符和预测 pCT( pseudo CT) 图像。第 1 阶段,首先采用稠密 SIFT 提取 MR 图像的特征; 其次通过显式特征映射将其投影到高维空间并与原始块强度结合,作为初始非线性描述符; 最后在基于改进的描述符学习( SDL) 框架中学习包含监督的 CT 信息的局部描述符。第 2 阶段,在训练 MR 图像的约束空间内搜索输入 MR 图像的局部描述符的 K 最近邻域,和对应原始 CT 块进行映射,对重叠的 CT 块进行加权平均处理得到最终的pCT 块。与仅使用成像参数 T1w 或 T2w 的 MR 图像方法相比,FMLND 方法提高了预测的准确率。 对骨盆CT和MRI匹配可以促进前列腺癌放射治疗两种方式的有效融合。由于骨盆器官的模态外观间隙较大,形状/外观变化程度高,导致匹配困难。基于此,Cao 等人【34】提出基于双向图像合成的区域自适应变形匹配方法,用于多模态骨盆图像的匹配,双向图像合成,即从MRI合成CT并从CT合 成MRI。多目标回归森林 MT-RF 采用CT模式和MRI模式对方向图像合成进行联合监督学习,消除模态之间的外观差异,同时保留丰富的解剖细节,其匹配流程为: 首先,通过 MT-RF 合成双向图像,获得实际CT和合成CT( S-CT) 的CT像对以及实际MRI和合成 MRI( S-MRI) 的 MRI 像对;其次,对CT像对的骨骼区域和 MRI像对的软组织区域进行检测,以结合两种模式中的解剖细节;最后,利用从两种模式中选择的特征点进行对称匹配。在匹配过程中,特征点数量逐渐增加,对形变场的对称估计起到较好的分级指导作用。该方法能够较好地解决骨盆图像匹配问题,具有较高的准确性和鲁棒性。
何梦梦等人【35】对细节纹理信息丰富的高分辨率光学及 SAR( synthetic aperture radar) 遥感图像进行分析,提出一种特征级高分辨率遥感图像快速自动匹配方法。该方法首先对匹配图像和待匹配图像进行 Harr 小波变换,将其变换到低频近似图像再进行后续处理,以提高图像匹配速度;接着对光学图像和 SAR 图像分别采用 Canny 算子和 ROA( ratio of averages) 算子进行边缘特征提取,并将边缘线特征转换成点特征;而后通过匹配图像和待匹配图像中每对特征点之间的最小和次小角度之比确定初始匹配点对,并通过对随机抽样一致性算法( RANSAC) 添加约束条件来滤除错误匹配点对;最后采用分块均匀提取匹配点对的方法,进一步提高匹配精度。该方法能快速实现并具有较高的配准精度和较好的鲁棒性。
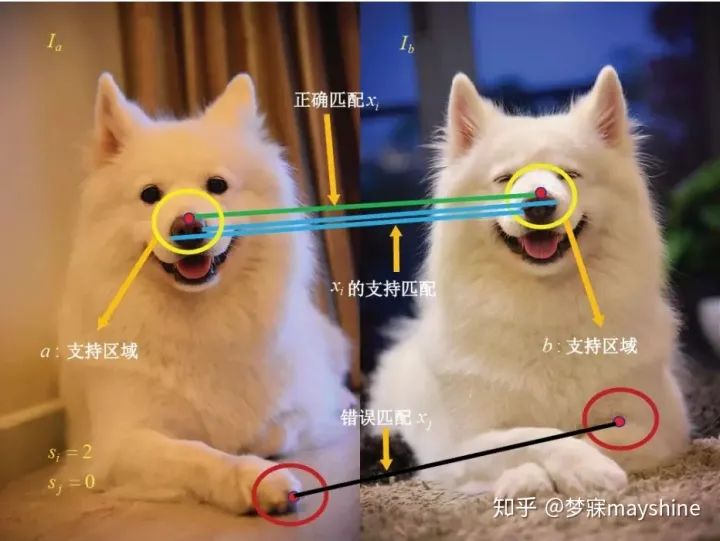
Fischler 等 人[36]提出 RANSAC 方法,采用迭代方式从包含离群数据的数据集中估算出数学模型。进行匹配点对的提纯步骤为: 1) 从已匹配的特征点对数据集中随机抽取四对不共线的点,计算单应性矩阵 H,记作模型 M; 2) 设定一个阈值 t,若数据集中特征点与 M 之间的投影误差小于t,就把该点加入内点集,重复以上步骤,迭代结束后对应内点数量最多的情况即为最优匹配。RANSAC 对误匹配点的剔除依赖单应性矩阵的计算,存在计算量大、效率低等问题。 文献[37] 通过引入针对内点和外点的混合概率模型实现了参数模型的最大似然估计。 文献[38] 使用支持向量回归学习的对应函数,该函数将一幅图像中的点映射到另一幅图像中的对应点,再通过检验它们是否与对应函数一致来剔除异常值。 将点对应关系通过图匹配进行描述[39-40] 为了在不依赖 RANSAC 情况下恢复大量内点,Lin 等人【41】提出 BF( bilateral functions) 方法,从含有噪声的匹配中计算全局匹配的一致函数,进而分离内点与外点。BF从一组初始匹配结果开始,利用每个匹配定义的局部仿射变换矩阵计算两幅图像之间的仿射运动场。在给定运动场的情况下,BF为每个特征在描述符空间寻找最近邻匹配以恢复更多对应关系。与RANSAC 相比,双边运动模型具备更高的查全率和查准率。 受BF启发,Bian 等人【42】将运动平滑度作为统计量,提出基于网格的运动统计( GMS) 方法,根据最近邻匹配数量区分正确匹配和错误匹配点对。GMS 算法的核心为运动统计模型,如图 4 所示。其中,si 和 sj 分别表示正确匹配 xi 和错误匹配 xj 的运动统计,为了加速这一过程,可将整幅图像划分成 G = 20 × 20 的网格,并在网格中进行操作。由于 GMS 算法在进行网格划分时,并未考虑图像大小,对于长宽比例不一致的图像,会生成矩形状的网格,导致网格中特征分布不均。基于此,文献[43]通过计算五宫格特征分数剔除外点,并将图像大小作为约束对图像进行方形网格划分,能够在提高运算速度的同时获得与 GMS 算法相同的匹配精度。
Ma 等人[44]提出 VFC( vector field consensus) 方法,利用向量场的光滑先验,从带有外点的样本中寻找向量场的鲁棒估计。向量场的光滑性由再生核希尔伯特空间( RKHS) 【45】范数表征,VFC 算法基于这一先验理论,使用贝叶斯模型的最大后验( MAP) 计算匹配是否正确,最后使用 EM 算法将后验概率最大化。VFC 算法的适用范围: 1) 误匹配比例高的时候( 遥感图像、红外图像和异质图像) ; 2) 无法提供变换模型的时候(如非刚性变形、相机参数未知);3) 需要一个快速匹配算法且不需要求解变换参数的时候。
Part2:局部不变特征点匹配-3D
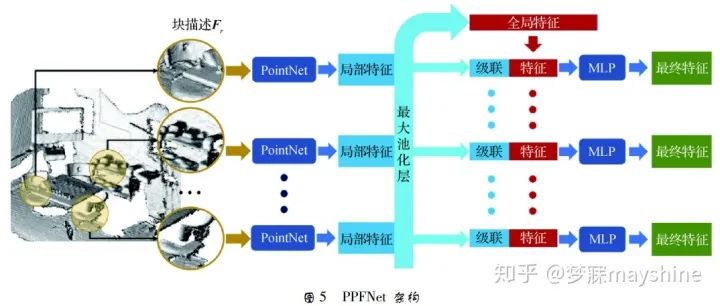
PointNet【46】可以直接将 3D 点云作为输入,其改进版。PointNet++【47】能更好地提取局部信息。3 维局部描述符在 3 维视觉中发挥重要作用,是解决对应估计、匹配、目标检测和形状检索等的前提,广泛应用在机器人技术、导 航( SVM) 和场景重建中。点云匹配中的 3 维几何描述符一直是该领域的研究热点,这种描述符主要依赖 3 维局部几何信息。 Deng 等人[48]提出具有全局感知的局部特征提取网络 PPFNet ( point pair feature network) 。PPFNet 结构如图 5 所示。块描述 Fr 由点对特征( PPF) 集合、局部邻域内的点及法线构成,首先采用 PointNet 处理每个区域块,得到局部特征;其次通过最大池化层将各个块的局部特征聚合为全局特征,将截然不同的局部信息汇总到整个片段的全局背景中;最后将该全局特征连接到每个局部特征,使用一组多层感知机( MLP) 进一步将全局和局部特征融合到最终全局背景感知的局部描述符中。PPFNet 在几何空间上学习局部描述符,具有排列不变性,且能充分利用原始点云的稀疏性,提高了召回率,对点云的密度变化有更好的鲁棒性。但其内存使用空间与块数的 2 次方成正比,限制了块的数量,目前只能设置为 2 K。
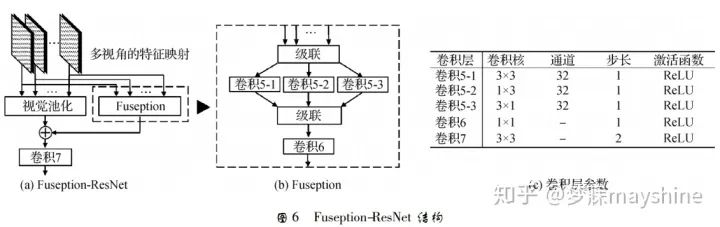
在基于深度模型的匹配算法中,Zhou 等人【49】基于多视图融合技术Fuseption-ResNet(FRN) ,提出多视图描述符 MVDesc。FRN 能将多视图特征映射集成到单视图上表示,如图 6 所示。其中,视图池化 ( view pooling) 用于快捷连接,Fuseption 分支负责学习残差映射,两个分支在精度和收敛率方面互相加强。采用 3 × 3、1 × 3 和 3 × 1 3 种不同内核尺寸的轻量级空间滤波器提取不同类型的特征,并采用上 述级联特征映射的 1 × 1 卷积负责跨通道统计量的合并与降维。将 FRN 置于多个并行特征网络之上,并建立 MVDesc 的学习网络,其中卷积 6 的通道数与特征网络输出的特征映射通道数相同。
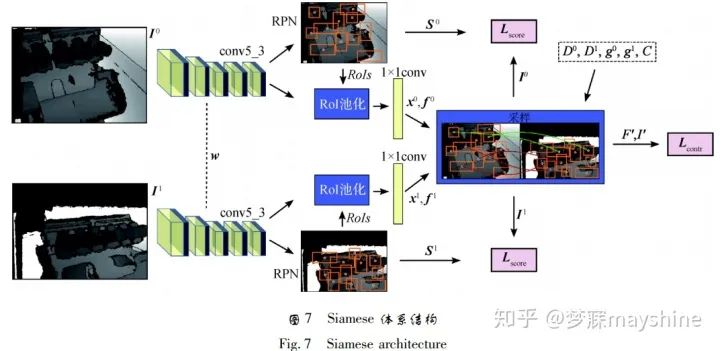
与依赖多视图图像或需要提取固有形状特征的卷积神经网络不同,Wang 等人[50]提出一种可以根据 3 维曲面形状生成局部描述符的网络框架。该方法将关键点的邻域进行多尺度量化并参数化为 2 维网格,并将其称之为几何图像,描述符的训练过程如下: 首先 提取曲面上关键点邻域的多尺度局部块,根据这些块构造一组几何图像;其次将这些块输入 Triplet 网络,每个网络分支采用 ConvNet ( convolutional networks) 训练; 最后输出 128 维描述符,并采用 MinCV Triplet 损失函数最小化锚样本和正样本距离的变异系数(CV) 之比。相对于其他局部描述符学习方法,该方法具有更好的可区分性、鲁棒性及泛化能力。 Georgakis 等人[51]提出用于特征点检测和描述符学习的端到端框架。 该框架基于 Siamese 体系结 构,每个分支都是一个改进的 Faster R-CNN[52]。如 图 7 所示,采用 VGG-16 的卷积层 cov5_3 提取深度图I的深度卷积特征,一方面经过RPN( region propose network) 处理,产生特征点的候选区域( 橙色区域) 及分数 S ; 另一方面输入到 RoI( region of interest) 池化层,经过全连接层将特征点候选区域映射到对应卷积特征f 上; 采样层以候选区域的质心 x、 卷积特征 f 、深度图像值 D、相机姿态信息 g 和相机内在参数作为输入,动态生成局部块对应标签(正或负) ,并采用对比损失函数 Lcontr 最小化正样本对间的特征距离,最大化负样本对间的距离,该方法对视角变化具有一定的鲁棒性。
采用基于图模型的3维误匹配点剔除方法RMBP( robust matching using belief propagation) 。该模型可以描述匹配对之间的相邻关系,并通过置信传播对每个匹配对进行推断验证,从而提高 3 维点匹配的准确性和鲁棒性。
Part3:直线匹配
Wang 等人[53]提出 的 MSLD( mean standard deviation line descriptor) 方法通过统计像素支持区域内每个子区域 4 个方向的梯度向量构建描述子矩阵,进而提高描述符的鲁棒性。MSLD 对具有适当变化的纹理图像有较好的匹配效果,可以应用在 3 维重建和目标识别等领域。为了解决 MSLD 对尺度变化敏感问题,文献[54]将区域仿射变换和 MSLD 相结合,利用核线约束确定匹配图像对应的同名支持域,并对该支持域进行仿射变换以统一该区域大小,实现不同尺度图像上直线的可靠匹配。 与 MSLD 相似,Zhang 等人[55]提出 线带描述符( LBD) ,在线支持区域( LSR) 中计算描述符,同时利用直线的局部外观和几何特性,通过成对几何一致评估提高对低纹理图像直线匹配的精确度。该方法可在不同尺度空间中检测线段,能够克服线段碎片问题,提高抗大尺度变化的鲁棒性。
当像对间旋转角度过大时,单线段匹配方法的匹配准确率不高,可以采用线段组匹配方法通过更多的几何信息解决这一问题。Wang 等人[56]基于线段局部聚类的方式提出半局部特征 LS( line signature) ,用于宽基线像对匹配,并采用多尺度方案提高尺度变化下的鲁棒性。 为了提高在光照不受控制情况下对低纹理图像的匹配准确度,López 等人[57]将直线的几何特性、局部外观及线邻域结构上下文相结合,提出双视图( two-view) 直线匹配算法 CA。首先对线特征进行检测: 1) 在高斯尺度空间利用基于相位的边缘检测器提取特征; 2) 根据连续性准则将边缘特征局部区域近似为线段; 3) 在尺度空间进行线段融合。其次,该方法中的相位一致性对于图像亮度和对比度具有较高不变性,线段融合可以减少重叠线段以及线段碎片出现。最后,线特征匹配采用迭代方式进行,通过不同直线邻域的局部结构信息来增强每次迭代的匹配线集,该方法适用于低纹理图像中线特征的检测与匹配。
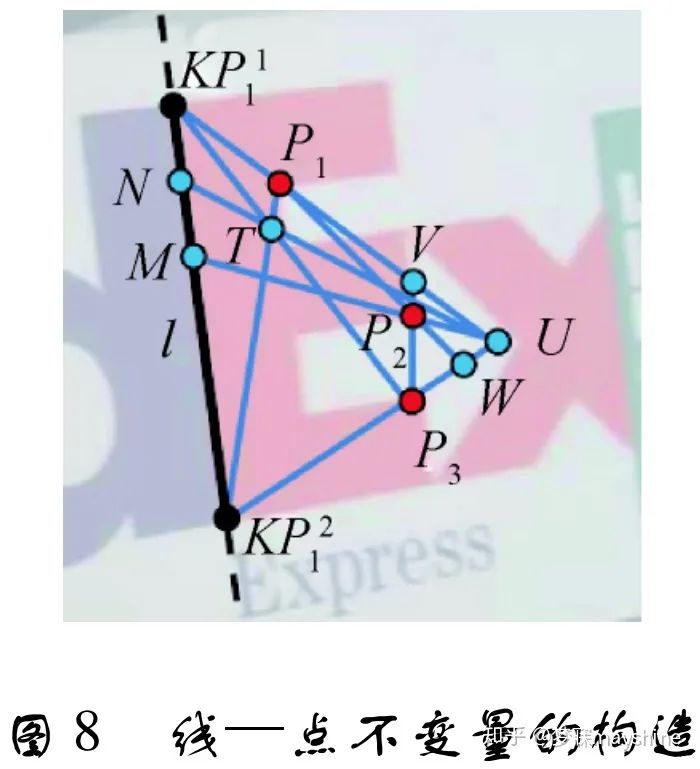
Fan 等人[58-59]利用线及其邻域点的局部几何信息构造共面线—点不变量( LP) 用于线匹配。LP 包括:“一线 + 两点”构成的仿射不变量和“一线 + 四点”构成的投影不变量。该投影不变量和“两线+两点”构成的投影不变量[60] 相比,可以直接用于线匹配而无需复杂的组合优化。根据直线的梯度方向,将线邻域分为左邻域和右邻域( 线梯度方向) ,以获得左右邻域内与线共面的匹配点,进行线相似性度量时,取左右邻域相似性的最大值。 该方法对误匹配点和图像变换具有鲁棒性,但高度依赖匹配关键点的准确性。为此,Jia 等 人[61]基于特征数 CN[62]提出一种新的共面线—点 投影不变量。CN 对交叉比进行扩展,采用线上点和线外点描述基础几何结构。通过“五点”构造线—点不变量,其中两点位于直线上,另外三点位于直线同一侧但不共线,如图 8 所示。点 KP1 l ,KP2 l , P1 ,P2 ,P3 用于构造该不变量,通过两点连线可以获得其他特征点。计算直线邻域相似性时,把线邻域按照线梯度方向分为左邻域和右邻域( 梯度方向) ,根据线点不变量分别计算左、右邻域的相似性。这种相似性度量方法受匹配特征点的影响较小。该方法对于低纹理和宽基线图像的线匹配效果要优于其他线匹配算法,对于很多图像失真也有较好鲁棒性。由于该线—点不变量是共面的,对于非平面场景图像的处理具有局限性。
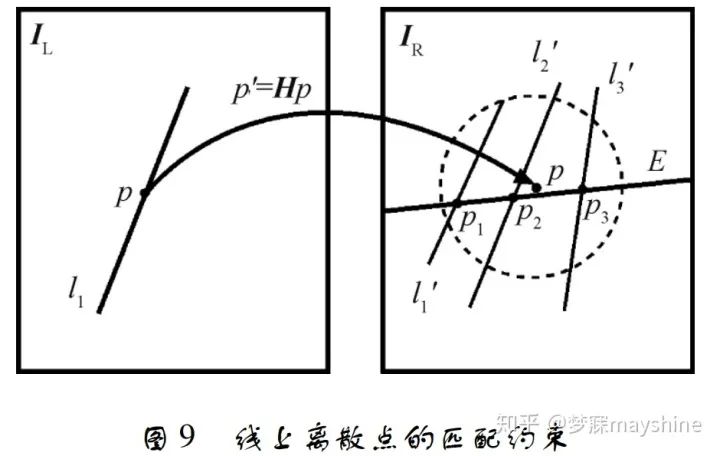
对航空影像进行线匹配时,线特征通常会出现遮挡、变形及断裂等情况,使得基于形态的全局描述符不再适用。基于此,欧阳欢等人[63]联合点特征匹配优势,通过对线特征进行离散化描述并结合同名点约束实现航空影像线特征匹配。线特征离散化,即将线看做离散点,通过统计线上同名点的分布情况来确定线特征的初匹配结果,最后利用点线之间距离关系对匹配结果进行核验。同名点约束包括单应性约束和核线约束,单应性约束实现线特征之间的位置约束,核线约束将匹配搜索空间从 2 维降至 1 维。线上离散点的匹配约束如图 9 所示,IL 为目 标影像,l1 为目标线特征,p 为其上一点; IR 为待匹配影像,线 E 代表 p 所对应核线,p' 为 p 由单应性矩 阵映射得到的对应点,虚线圆为单应性矩阵的约束 范围,l'1 、l'2 、l'3 是由约束确定的候选线特征,点 p1、p2 、p3 为 p 的候选同名点。该算法匹配正确率高,匹配速度相对较快,可实现断裂线特征的多对多匹配,但匹配可靠性仍受到点特征匹配的影响,对于难以获得初始同名点的区域,其适用性不高。
Part4:区域匹配
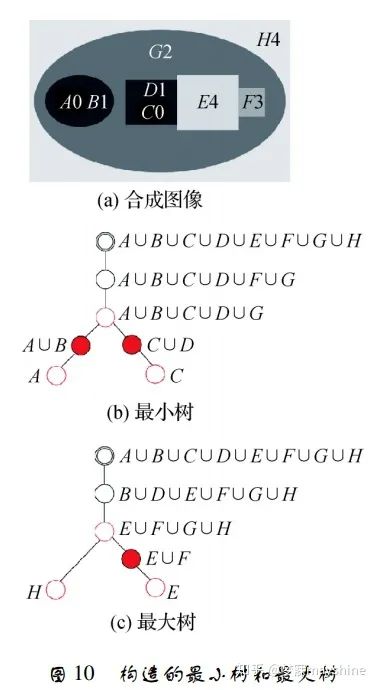
Matas 等人[64]于 2002 年提 出最大稳定极值区域( MSER) 采用分水岭方法,通过对灰度图像取不同阈值分割得到一组二值图,再分析相邻二值图像的连通区域获得稳定区域特征。经典MSER算法具有较高的时间复杂度。 Nistér 等 人[65]基于改进的分水岭技术提出一种线性计算 MSER 的算法,该算法基于像素的不同计算顺序,获得与图像中存在灰度级数量相同的像素分量信息,并通过组件树表示对应灰度级。MSER 这类方法可用于图像斑点区域检测及文本定位,也可与其他检测器结合使用,如文献[66]将 SURF 和 MSER 及颜色特征相结合用于图像检索,文献[67]将 MSER 与 SIFT 结合用于特征检测。 区域特征检测还可利用计算机技术中的树理论进行稳定特征提取,Xu 等人[68]提出一种基于该理论的拓扑方法 TBMR( tree-based Morse regions) 。该方法以 Morse 理论为基础定义临界点:最大值点、最小值点和鞍点,分别对应最大树叶子节点、最小树叶子节点和分叉节点。TBMR 区域对应树中具有唯一子节点和至少具有一个兄弟节点的节点。如图 10 所示,节点 A 和 C 代表最小值区域; 节点 H 和 E 代 表最大值区域; 节点 A ∪ B ∪ C ∪ D ∪ G 和 E ∪ F ∪ G ∪ H 表示鞍点区域; 节点 A ∪ B 、C ∪ D 、E ∪ F 为所求 TBMR 区域。该方法仅依赖拓扑信息,完全继承形状空间不变性,对视角变化具有鲁棒性,计算速度快,与 MSER 具有相同复杂度,常用于图像配准和 3 维重建。
Korman 等人[69]提出可以处理任意仿射变换的模板匹配算法 FAST-Match ( fast affine template matching) ,该方法首先将彩色图像灰度化,再构建仿射变换集合,并遍历所有可能的仿射变换,最后计算模板与变换后区域之间绝对差值的和 SAD,求取最小值作为最佳匹配位置。该方法能够找到全局最优匹配位置,但对彩色图像匹配时,需预先转换成灰度图像,而这一过程损失了彩色空间信息,降低了图像匹配的准确率。 Jia 等人[70]将灰度空间的 SAD 拓展到 RGB 空间形成 CSAD( colour SAD) ,提出适合彩色图像的模板匹配算法 CFAST-Match ( colour FAST match) 。该方法通过矢量密度聚类算法计算每个像素点所属类别,并统计同类像素个数及 RGB 各通道的累计值,以此求解每个分类的矢量中心,将矢量中心作为 CSAD 的判定条件,同类像素个数的倒数作为分值系数,以此建立新的相似性度量机制。 上方法对存在明显色差的区域具有较高匹配精度,但部分参数依据经验设置,且不适合处理大尺寸图像。为了解决这一问题,文献[71]提出一种基于分值图的模板匹配算法。该方法依据彩色图像的多通道特征,采用抽样矢量归一化互相关方法 ( SVNCC) 度量两幅图像间的区域一致性,以降低光照和噪声影响。 Dekel 等人[72-73]基于模板与目标图像间的最近邻( NN) 匹配属性提出 一种新的 BBS( best-buddies similarity) 度量方法,采用不同图像特征( 如颜色、深度) 通过滑动窗口方式统计模板点与目标点互为 NN 的匹配数量,并将匹配数量最多的窗口视为最终匹配位置。但该算法在发生剧烈非刚性形变或处于大面积遮挡及非均匀光照等环境下匹配鲁棒性差。文献[74]利用曼哈顿距离代替 BBS 算法中的欧氏距离,并对生成的置信图进行阈值筛选和滤波,能够较好地解决光照不均匀、模板中外点较多与旋转变形等多种复杂条件下的匹配问题。 采用双向 NN 匹配导致 BBS 的计算时间较长, Talmi 等人[75]提出基于单向 NN 匹配的 DDIS ( deformable diversity similarity) 方法。首先计算目标图像窗口点在模板中的 NN 匹配点,并统计对应同一匹配点的数量,计算像素点的置信度。其次采用欧氏距离计算目标点和对应 NN 匹配点间距离,最后 结合度量模板和目标图像窗口间的相似性获得匹配结果。尽管 DDIS 降低了算法复杂度并提高了检测精度,但当形变程度较大时依然会影响匹配效果。 由于 DDIS 对每个滑动窗口单独计算 NN 匹配且滑动窗口的计算效率较低,导致模板在与较大尺寸的目标图像进行匹配时,处理时间较长。为此,Talker 等人[76]基于单向 NN 匹配提出 DIWU( deformable image weighted unpopularity) 方法。与 DDIS 基于目标图像窗口点不同,DIWU 计算整幅目标图像点在模板中的最近邻匹配点,若多个像素的 NN 匹配点相同,则像素的置信分数就低,匹配的正确性就低。DIWU 以第 1 个图像窗口的分数为基础,逐步计算之后的每个窗口分数,该方法在保证匹配准确性的同时,提高了运算速度,使得基于 NN 的模板匹配适合实际应用。 BBS 和 DDIS 均采用计算矩形块间的相似性度量解决几何形变和部分遮挡问题,但滑动窗口的使用限制了遮挡程度。Korman 等人[77]基于一致集最 大化( CSM) 提出适用于存在高度遮挡情况下的模 板匹配算法 OATM ( occlusion aware template matching) 。OATM 通过约简方法,将单个向量和 N 个目标向量间的匹配问题转化为两组 槡N 向量间的匹配问题,并基于随机网格哈希算法进行匹配搜索。匹配搜索的过程为寻找 CSM 的过程,即使用阈值内的 残差映射进行变换搜索。OATM 提高了算法的处理 速度,较好地解决了遮挡问题。 与基于欧氏距离的像素间的相似性不同,共现统计( cooccurrence statistics) 是从数据中学习像素间 的相似性。Kat 等人[78]通过统计模板点和目标点在 目标图像窗口共同出现的概率提出 CoTM( cooccurrence based template matching) 。CoTM 在处理彩色 图时,采用 k-means 聚类算法将图像量化为 k 个类簇,根据共现矩阵统计模板和目标图像中的类簇对在目标图像中共同出现的次数,再基于每个类簇的先验概率进行归一化,构造点互信息( PMI) 矩阵,值越大表明共现概率越高,误匹配率越低。最后根据 PMI 计算模板类簇中的像素和目标图像窗口中包含的类簇中的像素之间的相关性,选出最佳匹配位置。CoTM 也适用于颜色特征之外的其他特征,如深度特征,可将共现统计( 捕获全局统计) 与深度特征 ( 捕获局部统计数据) 相结合,在基于标准数据集的 模板匹配中提升匹配效果。
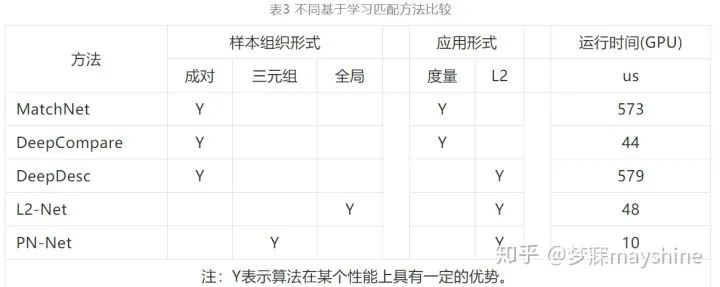
Han 等 人[79] 提出的 MatchNet 通过 CNN 进行图像区域特征提取和相似性度量,过程如图 11 所示。对于每个输入图像块, 特征网络输出一个固定维度特征,预处理层的输入为灰度图像块,起到归一化作用。卷积层激活函数 为 ReLU,瓶颈( bottlebeck) 层为全连接层,能够降低特征维度并防止网络过拟合。采用 3 个全连接层组 成的度量网络计算特征对的匹配分数,双塔结构在监督环境下联合训练特征网络和度量网络。 Zagoruyko 等人[80] 提出 DeepCompare 方法,通过 CNN 比较灰度图像块对的相似性。该方法对基础网络框架 Siamese、pseudo-Siamese 和 2 通道( 2ch) 进行描述,并在此基础上采用深度网络、中心环绕双 流网络( central-surround two-stream,2stream) 和空间 金字塔池化( SPP) 网络提升基础框架性能。 为了提高卫星影像的配准率,范大昭等人[81]提出基于空间尺度双通道深度卷积神经网络方法 ( BBS-2chDCNN) 。BBS-2chDCNN 是在双通道深度卷积神经网络( 2chDCNN) 前端加入空间尺度卷积层,以加强整体网络的抗尺度特性。2chDCNN 将待匹配点对局部合成的两通道影像作为输入数据,依次进行 4 次卷积、ReLU 操作、最大池化操作,3 次卷积和 ReLU 操作,最后进行扁平化和两次全连接操作输出一维标量结果。该方法适用于处理异源、多时相、多分辨率的卫星影像,较传统匹配方法能提取到更为丰富的同名点。
Balntas 等人[82]提出的 PN-Net 采用 Triplet 网络训练,训练过程如图 14 所示。图像块三元组 T = { p1,p2,n} ,包 括 正 样 本 对 ( p1,p2 ) 和 负 样 本 对 ( p1,n) 、( p2,n) ,采用 SoftPN 损失函数计算网络输 出描述子间相似性,以确保最小负样本对距离大于正样本对距离。表 2 给出所采用的 CNN 体系结构 的参数,采用 32 × 32 像素的图像块作为输入,括号内的数字表示卷积核大小,箭头后面的数字表示输出通道数,Tanh 为激活函数。与其他特征描述符相比,PN-Net 具有更高效的描述符提取及匹配性能,能显著减少训练和执行时间。 Yang 等人[83]提出用于图像块表示的一对互补描述符学习框架 DeepCD。该方法采用 Triplet 网络 进行训练,输出主描述符( 实值描述符) 和辅描述符 ( 二值描述符) ,如图 15 所示,输入图像区域包括正样本对 ( a,p) ,负样本对 ( a,n) 和 ( p,n) ,L 代表 主描述符,C 代表辅描述符,Δ 代表主描述符距离, Δ 珚代表辅描述符距离。数据相关调制层( DDM) 通过学习率的动态调整实现辅助描述符对主导描述符的辅助作用。该方法能够有效地提高图像块描述符在各种应用和变换中的性能。 以上这些方法都是对图像块对或三元组进行的处理,Tian 等人[84]提出的 L2-Net 通过 CNN 在欧氏空间将一批图像块转换成一批描述符,将批处理中的最近邻作为正确匹配描述符。如图 16 所示,每个 卷积层左边数字代表卷积核大小,右边数字表示输出通道数,2 表示下采样层的步长; 3 × 3 Conv 由卷积、批归一化( BN) 和 ReLU( rectified linear unit) 组成; 8 × 8 Conv 由卷积和批归一化( BN) 组成; 局部响应归一化层( LRN) 作为单元描述符的输出层,获 得 128 维描述符。CS L2-Net 由两个独立 L2-Net 级联成双塔结构,左侧塔输入和 L2-Net 相同,右侧塔输入是中心裁剪后的图像块。采用渐进式采样策略,在参与训练的批样本中,从每对匹配样本中随机抽取一个组成若干不匹配样本,增加负样本数量。与成对样本和三元组样本相比,能够利用更多负样本信息。
比较
2维点匹配
TILDE https://cvlab.epfl.ch/research/tilde 协变特征检测[17] http://dvmmweb.cs.columbia.edu/files/3129.pdf https://github.com/ColumbiaDVMM/Transform_Covariant_Detector DeepDesc http://icwww.epfl.ch/~trulls/pdf/iccv-2015-deepdesc.pdf https://github.com/etrulls/deepdesc-release LIFT https://arxiv.org/pdf/1603.09114.pdf https://github.com/cvlab-epfl/LIFT Quad-networks https://arxiv.org/pdf/1611.07571.pdfGMShttp://jwbian.net/gmsVFC http://www.escience.cn/people/jiayima/cxdm.html
3维点匹配
PPFNet http://tbirdal.me/downloads/tolga-birdal-cvpr-2018-ppfnet.pdf 文献[51] http://cn.arxiv.org/pdf/1802.07869 文献[49] http://cn.arxiv.org/pdf/1807.05653 文献[50] http://openaccess.thecvf.com/content_ECCV_2018/papers/Hanyu_Wang_Learning_3D_Keypoint_ECCV_2018_paper.pdf
语义匹配
样本LDA分类器 http://ci2cv.net/media/papers/2015_ICCV_Hilton.pdf https://github.com/hbristow/epic AnchorNet http://openaccess.thecvf.com/content_cvpr_2017/papers/Novotny_AnchorNet_A_Weakly_CVPR_2017_paper.pdf 文献[28] http://cn.arxiv.org/pdf/1711.07641
线匹配
LBD http://www.docin.com/p-1395717977.html https://github.com/mtamburrano/LBD_Descriptor 新线点投影不变量[61] https://github.com/dlut-dimt/LineMatching
模板匹配
FAST-Match http://www.eng.tau.ac.il/~simonk/FastMatch/ CFAST-Match https://wenku.baidu.com/view/3d96bf9127fff705cc1755270722192e453658a5.html DDIS https://arxiv.org/abs/1612.02190 https://github.com/roimehrez/DDIS DIWU http://liortalker.wixsite.com/liortalker/code CoTM http://openaccess.thecvf.com/content_cvpr_2018/CameraReady/2450.pdf OATM http://cn.arxiv.org/pdf/1804.02638
块匹配
MatchNet http://www.cs.unc.edu/~xufeng/cs/papers/cvpr15-matchnet.pdf https://github.com/hanxf/matchnet DeepCompare http://imagine.enpc.fr/~zagoruys/publication/deepcompare/ PN-Net https://arxiv.org/abs/1601.05030 https://github.com/vbalnt/pnnet L2-Net http://www.nlpr.ia.ac.cn/fanbin/pub/L2-Net_CVPR17.pdf https://github.com/yuruntian/L2-Net DeepCD https://www.csie.ntu.edu.tw/~cyy/publications/papers/Yang2017DLD.pdf https://github.com/shamangary/DeepCD
编辑:黄继彦
校对:林亦霖
评论